Все процессы, происходящие в динамических системах, например, дистанция, определяемая с помощью дальномера, или курсовой угол - с помощью визира, сопровождаются случайными ошибками, накладывающимися на истинный результат.
Для точного исследования какого-либо процесса необходимо условия исследования как можно больще приблизить к реальным, что требует воспроизведения случайных помех (ошибок, отклонений), имеющих место при работе реальных систем.
До настоящего времени этот процеос осуществлялся вручную, что затрудняло исследование и не давало возможности проводить его с учетом наличия помех при непрерывно изменяющемся изучаемом процессе.
Отличительная особенность описываемого механизма, предназначенного для автоматического воспроизводства случайных ошибок и отклонений, подчипяюшихся заранее заданному закону рассеивания, например закону Гаусса, заключается в том, что механизм выполнен в виде равномерно вращающегося кулачка, профиль которого рассчитан по заданному закону рассеивания; кроме того, для пол чения зависимости характеристик рассеивания от какого-либо аргумента в механизме вместо плоского кулачка применен коноид, по оси которого откладывают величину аргумента (например, дальности).
Описываемый прибор может имитировать работу дальномера.
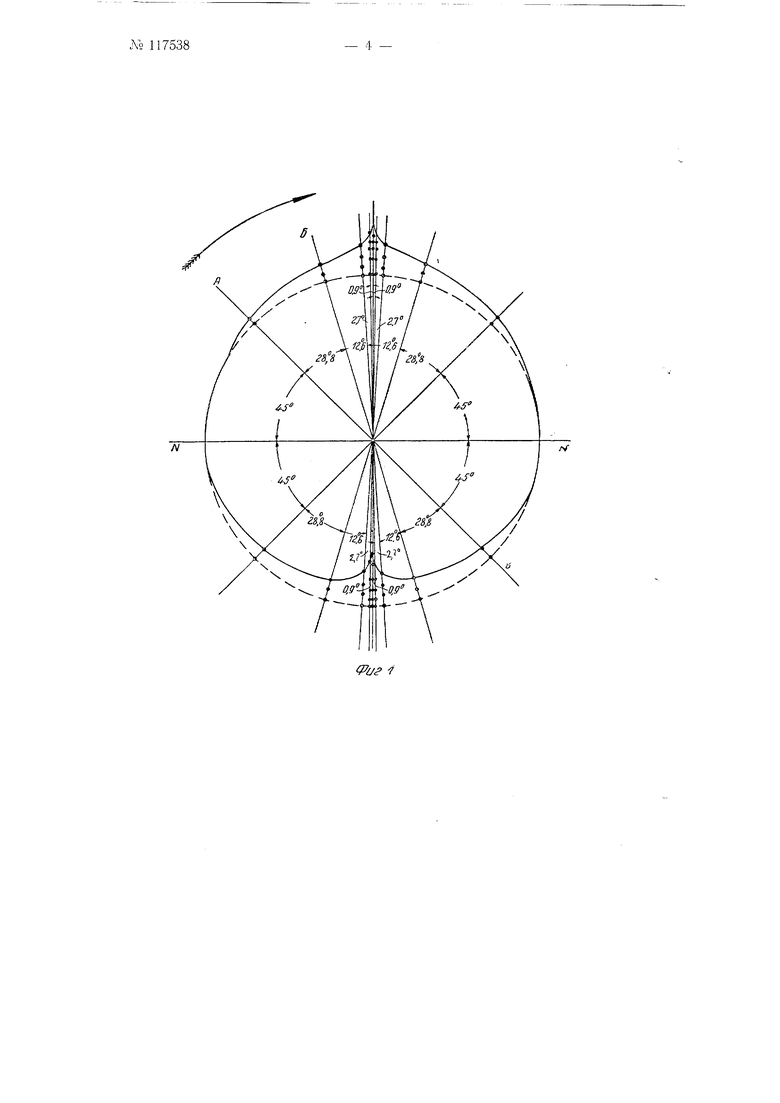
На фиг. 1 показана схема построения кулачка, предназначенного для воспроизведения закона Гаусса; на фиг. 2 - принципиальная схема механизма; на фиг. 3 -схема механизма с копоидом; на фиг. 4 - механизм, имитирующий работу дальномера.
Как известно, для закона Гаусса можно составить следующую таблицу зависимости 1ежду случайными ошибками и вероятностью их появления.
Р%Д /5РО/оД -/В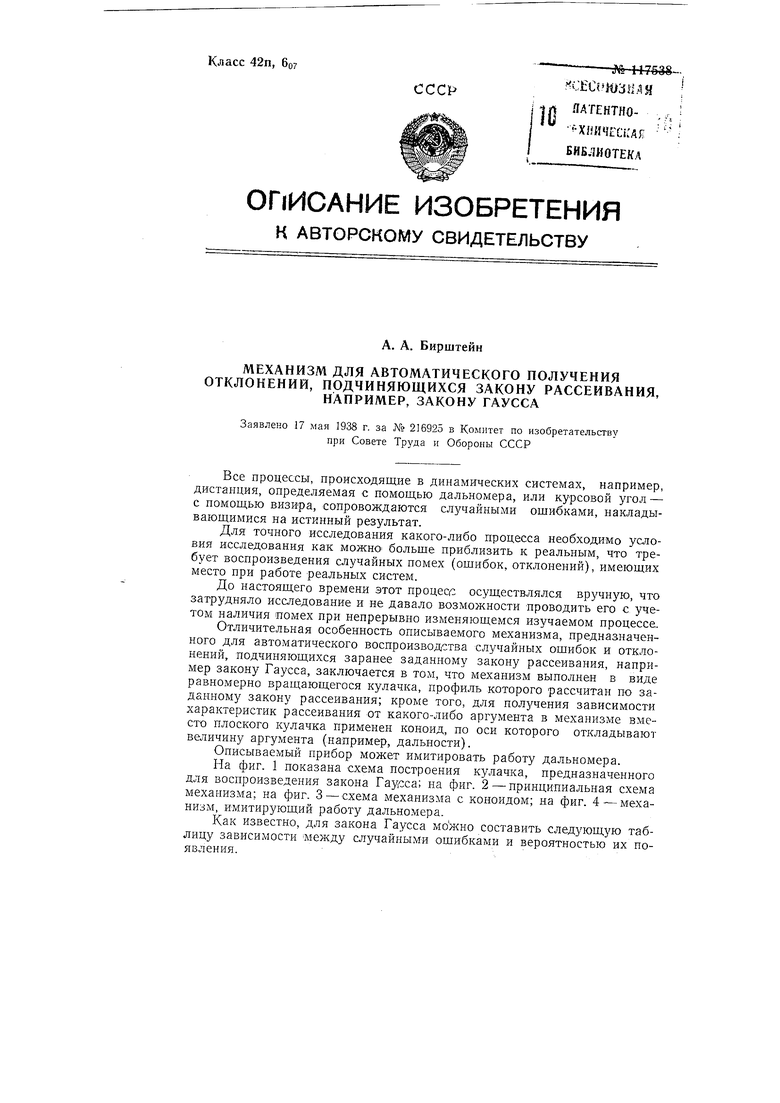


| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для воспроизведения закона равной вероятности событий | 1957 |
|
SU113965A1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ АРТИЛЛЕРИЙСКИМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2009 |
|
RU2408832C1 |
| УСТРОЙСТВО ОПТИМИЗАЦИИ ВЕСОВЫХ КОЭФФИЦИЕНТОВ СЛЕДЯЩЕЙ ФИЛЬТРАЦИИ | 2022 |
|
RU2805171C1 |
| Прибор для определения спектральной плотности случайной функции по ее корреляционной функции | 1957 |
|
SU119021A1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ С ЛАЗЕРНЫМ ДАЛЬНОМЕРОМ | 2014 |
|
RU2572463C1 |
| Зеркальный компенсатор к дальномеру | 1933 |
|
SU41200A1 |
| СПОСОБ СОЗДАНИЯ АКТИВНЫХ ПОМЕХ ЛАЗЕРНЫМ СРЕДСТВАМ ДАЛЬНОМЕТРИРОВАНИЯ | 2000 |
|
RU2186409C2 |
| СПОСОБ ТОМОГРАФИЧЕСКОЙ РЕГИСТРАЦИИ НАКЛОННОЙ ДАЛЬНОСТИ И АЗИМУТА ПОЛОЖЕНИЯ НАДВОДНЫХ ОБЪЕКТОВ И ОБЪЕКТОВ НАД ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТЬЮ | 2021 |
|
RU2760976C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАИБОЛЕЕ ВЕРОЯТНЫХ ЗНАЧЕНИЙ ПЕЛЕНГОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ НА ОДНОЙ ЧАСТОТЕ | 2012 |
|
RU2530748C2 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2001 |
|
RU2189625C1 |
Здесь Р - вероятность появления ошибок; А - случайная ошибка; б - вероятная ошибка или вероятное отклонение; i - число вероятных ошибок, содержаш 1хся в данной случайной ошибке. Величина i изменяется от О до 5.
Приведенная таблица составлена для интервалов изменения Д через -одну вероятную ошибку. Аналогичным образом можно было бы составить таблицу для интервалов изменения А через 0,5 б и т. д.
Для расчета и ностроения кулачка берется угол ф новорота его пропорциональным вероятности Р
° ,
а прирашение г радиуса кулачка берут пропорциональным величине А случайной ошибки:
Если значение начального радиуса кулачка обозначим через R, тогда текушее значение переменного радиуса р кулачка будет
р ; + СгА
На основе этих формул строится кривая вероятных ошибок (А iS), подчиняющихся закону Гаусса для случая, например, когда интервал изменения Р равен 10%.
Построение затем кулачка, предназначенного для воспроизводства закона Гаусса, сводится к следующему: вдоль первого луча А начальный радиус R кулачка увеличивают на величину г, пропорциональную одной вероятной ошибке (); вдоль второго луча Б радиуса R увеличивают на величину г, пропорциональную двум вероятным ошибкам (А-26) и т. дТаким образом, верхняя часть кулачка, лежащая над линией NN, соответствует положительным значениям случайных ошибок, а нижняя часть-отрицательным значениям случайных ошибок. Начиная С луча В и до нулевого луча (на линии NN) по часовой стрелке приращение радиуса кулачка делается отрицательным.
Если рассчитанный подобным образом кулачок 1 вращать, например, электродвигателем 2 равномерно с определенным периодом и затем через совершенно случайные, подчиняющиеся закону ранной вероятности промежутки времени снимать щупом 5 с этого кулачка случайные ошибки, то распределение этих случайных ошибок будет подчиняться закону Гаусса. Можно заданный закон распределения случайных ошибок осуществлять не одним, а двумя кулачками, а снимаемый с этих кулачков результат суммировать на дифференциале.
В случае, когда требуется осуществить закон Гаусра при переменном значении вероятной ошибки 5, изменяющейся в каком-либо периоде, кулачок следует заменить коноидом, у которого определенное сечение, перпендикулярное его оси, представляет собой описанный выще кулачок, рассчитанный для определенного значения б вероятного отклонения: для изменения величины б следует лишь переместить щуп 3 на то сечение коноида 4, которое соответствует заданному установкой 5 значению б. Расчет
Г Кг
коноида производится как расчет некоторого количества кулачков для ряда конкретных значений 6, а величина вероятной ошибки устанавливается как функция какого-то аргумента х, т. е.
в этом случае удобнее перемещение коноида 4 или щупа 3 вдоль оси коноида 4 делать пропорциональным значению аргумента у,.
Для исследования динамической точности систем приборов управления стрельбой и пр., где в качестве входного параметра используется дистанция, необходимо воспроизводить этот параметр с наложенными на него случайными помехами, свойственными тому или иному виду прибора, например оптическому дальномеру.
Механизм, предназначенный для имитации вырабатываемой с помощью оптического дальномера дистанции до цели с учетом реальных помех, подчиняющихся закону распределения Гаусса, содержит непрерывно вращаемый электродвигатель 2, соприкасающийся со щупом 3 коноид 4 и прибор 5, подающий на винт 6 истинную текущую дистанцию Д. Снимаемая с коноида 4, случайная ошибка А гб, подчиняющаяся закону Гаусса, складывается на дифференциале 7 с истинной дистанцией Д„ . В результате этого на датчик 8 поступает текущее значение Д Д„ +А, как бы измеренное с помощью олтического дальномера в реальных условиях. Снятие с датчика 8 значений текущей дистанции Д следует производить через случайные промежутки времени, подчиняющиеся закону равной вероятности.
Предмет изобретения
1- Механизм для автоматического получения отклонений, подчиняющихся закону рассеивания, например, закону Гаусса, отличающийс я тем, что он выполнен в виде равномерно вращающегося кулачка, профиль которого рассчитан но заданному закону рассеивания.
- 3 -№ 117538
6 /W
