Изобретение относится к области радиолокации и может быть использовано для увеличения точности определения координат целей с флуктуирующей эффективной поверхности рассеивания (ЭПР) путем оптимизации значений весовых коэффициентов следящей фильтрации и выбора алгоритмов вторичной обработки радиолокационной информации.
В процессе работы радиолокационных станций обнаружения беспилотных летательных аппаратов (БПЛА) осуществляется обнаружение и сопровождение целей с флуктуирующей ЭПР на траектории их полета. По полученным координатам проводится наведение на БПЛА систем распознавания и подавления. Однако результаты обнаружения координат цели с флуктуирующей ЭПР радиолокационной станцией (РЛС) подвержены искажениям, связанным с высоким значением потенциальной ошибки определения координат. Уменьшение потенциальной ошибки измерения координат можно достичь путем увеличения энергетического потенциала радиолокационной станции, но данный способ ведет к ухудшению массогабаритных характеристик РЛС и уменьшению ее эксплуатационной надежности. Альтернативным путем решения данной проблемы является введение в систему вторичной обработки информации РЛС блока следящей фильтрации, позволяющей увеличить точность определения координат цели и осуществить завязку и последующую аппроксимацию траектории движения по результатам ряда обнаружений.
Построение блока следящей фильтрации траектории движения цели неразрывно связано с процессом выбора весовых коэффициентов следящей фильтрации. Уменьшение данных коэффициентов ведет к увеличению систематической составляющей ошибки определения координат целей, в то же время их избыточное увеличение не позволяет достигнуть значения ошибки определения координат цели меньшего, чем ее потенциальное значение. Следовательно, возникает необходимость нахождения оптимального весового коэффициента следящей фильтрации, позволяющего оптимизировать значения систематической и случайной составляющей ошибки определения координат и тем самым минимизировать общую ошибку определения координат цели. Таким образом, вопрос нахождения оптимальных весовых коэффициентов следящей фильтрации является весьма актуальным.
Проработке вопроса сопровождения траектории движения цели, ее следящей фильтрации и уменьшению ошибки определения ее координат посвящено множество печатных работ [6-10] и патентов.
Известно устройство автоматического сопровождения [1, 2], которое предполагает излучение и прием зондирующих сигналов от отражающих объектов, после чего принимается решение об обнаружении отметки цели (истинной или ложной), которой соответствуют некоторые измеренные значения полярных координат: дальности Di и пеленга Pi. Каждую обнаруженную в текущем i-ом цикле обработки (локации) отметку проверяют на ее принадлежность уже сопровождаемым траекториям по отклонению координат отметки от предполагаемых (экстраполируемых) значений. Согласно [1, 2], в качестве сопровождаемой отбирают отметку, попадающую в строб сопровождения, ближайшую по положению к экстраполируемому значению. Недостатком такого устройства отбора является его низкая помехозащищенность.
Известно устройство [3], представляющее собой цифровой многоитерациональный фильтр. Изобретение относится к цифровой вычислительной технике и может быть использовано в системах цифровой обработки сигналов при решении задач оптимальной нелинейной фильтрации.
Динамика оцениваемых параметров в устройстве описывается системой разностных уравнений в дискретном времени:
 где
где
x(k)=[х1 (k), xZ(k), …, xM (k)]T ∈ EM - вектор состояния исследуемой системы;
η(k)=[η1(k), ηZ(k), …, ηM(k)]T ∈ EM - вектор неизвестных внешних воздействий;
переходная функция F(x)(k), k)=[F1(x(k), k)F2(x(k), k), …,FM(xk, k)]T ∈ EM - непрерывная вместе с частными производными вектор-функция своих аргументов;
G∈EM×EM - матрица интенсивности внешних воздействий;
k, N, М - натуральные числа.
Предполагается, что матрица  имеет обратную матрицу.
имеет обратную матрицу.
Наблюдаемый сигнал, получаемый на выходе модели измерительной системы, описывается дискретным уравнением:
y(k)=H(x(k))+n(k), где
y(k)=[y1(k), yz(k), …, yL(k)]T ∈ EL - вектор наблюдения;
n(k)=[n1(k), nZ(k), …., nL(k)]T ∈ EL - вектор дискретного белого гауссовского шума с известными локальными характеристиками;
M[n(k)]=0, M[n(k)nT(I)]-Wδ(k-1), где
W - ковариационная матрица размерности L×L;
δ(⋅) - векторная дельта-функция;
Н(х(k))=[H1(x(k)), HZ(x(k)), …, HL(х(k))]T ∈ EL - сигнальная вектор-функция, непрерывна вместе с частными производными; L - натуральное число.
Приведенная ниже последовательность уравнений представляет собой цифровой интеллектуальный многокаскадный фильтр. Данный фильтр позволяет осуществить процесс цифровой обработки измерительной информации для дискретных динамических систем:
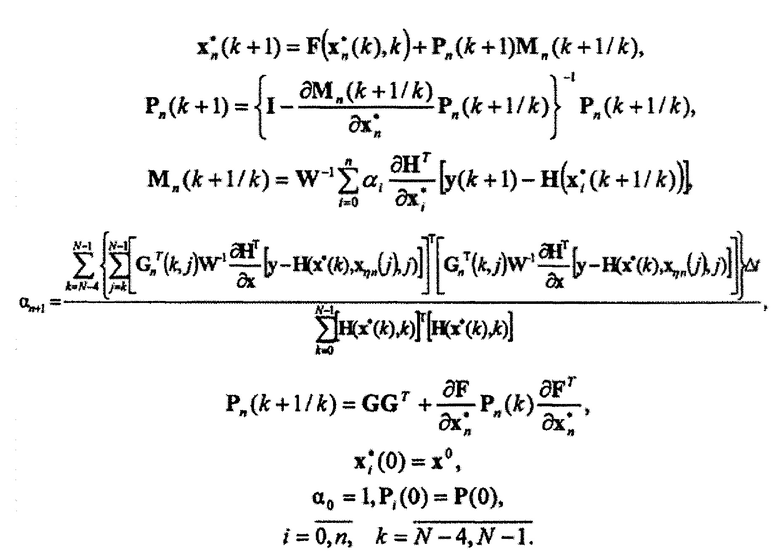
Недостатком предложенного устройства является отсутствие в фильтре механизма оценки значений вектора дискретного белого гауссовского шума n(k) на каждом измерении положения цели. Изменение весовых коэффициентов фильтра без привязки к текущим значениям среднеквадратического отклонения (СКО) определения координат цели приведет к увеличению ошибки определения координат.
Известно устройство [4], которое относится к области вычислительной техники, преимущественно к цифровой обработке дискретных сигналов. Технический результат заключается в повышении качества оценивания нестационарных процессов и систем путем компенсации ошибки работы фильтра Калмана. Сущность изобретения состоит в том, что расширенный фильтр Калмана дополняется адаптивным цифровым фильтром с алгоритмом адаптации NLMS, как эффективно действующим в условиях нестационарного входного сигнала и обладающим оптимальной вычислительной сложностью.
Блок адаптации, реализующий NLMS алгоритм адаптации, вычисляет весовые коэффициенты w следующим образом:
 где
где
k - некоторый текущий момент времени;
(k-1) - предыдущий момент времени;
x - матрица кадров апостериорной оценки состояния процесса/системы;
w - матрица весовых коэффициентов;
е(k) - вектор общей ошибки цифрового фильтра для нестационарных сигналов в момент времени k;
j - индекс элементов вектора е и матриц х и w, j∈[1, n];
i - индекс элементов матриц х и w, i∈[1, N];
μ - шаг сходимости, определяющий устойчивость и скорость сходимости алгоритма адаптации, μ больше 0; чем меньше μ, тем выше устойчивость и меньше скорость сходимости;
ε - некоторое положительное, крайне малое число, служащее для исключения ситуаций деления на нуль.
Использование блока адаптации, весовые коэффициенты которого находятся по указанной формуле, не позволяет прогнозировать ошибку определения положения цели и не может быть реализовано для инициации траектории движения цели. Также в изобретении не описан механизм учета флуктуаций ЭПР цели и определения потенциальных ошибок измерителя.
Известно устройство экстраполяции координат и скорости их изменения методом наименьших квадратов [5], позволяющий осуществить следящую фильтрацию траектории движения цели с линейной траекторией движения путем подбора полинома первой степени, обеспечивающего минимальные значения квадратов отклонений обнаружений радиолокационной станции от полинома.
Устройство рассчитано на вычисление экстраполированной координаты Xi и скорости ее изменения в i-ом наблюдении, используя метод наименьших квадратов.
При решении задачи определения координаты необходимо знать оценку координаты на момент последнего (n-го) измерения и экстраполированную на один период отсчетов РЛС Т оценку.
Весовые значения фильтра в данном случае определяются совокупностью выражений:

Недостатком данного устройства является отсутствие учета ошибки определения координат цели РЛС при выставлении весовых коэффициентов фильтра на каждом обнаружении цели. Кроме того любое ускорение цели (отклонение от линейной траектории движения) приведет к существенному увеличению систематической составляющей определения координат цели.
Целью предложенного изобретения и техническим результатом является создание устройства, позволяющего определить оптимальные весовые коэффициенты следящей фильтрации, минимизирующие ошибку определения координат цели с флуктуирующей ЭПР блоком следящей фильтрации РЛС.
Поставленная цель достигается тем, что перед установкой в состав РЛС эффективность блока следящей фильтрации проверяется путем априорного имитационного моделирования, учитывающего энергетический потенциал РЛС, флуктуации ЭПР цели, температурную нестабильность чувствительности РЛС, форму ДНА, а также динамические характеристики обнаруживаемой цели.
Возможность выполнения поставленной цели объясняется тем, что описанные выше признаки РЛС и ЭПР цели известны до начала обнаружения траектории и могут быть учтены при установке весовых коэффициентов в блоке следящей фильтрации.
Более подробно сущность изобретения состоит в следующем.
В предлагаемом устройстве оптимизации весовых коэффициентов следящей фильтрации используются следующие блоки:
- блок имитации траектории движения цели;
- блок флуктуаций эффективной поверхности рассеивания (блок флуктуаций ЭПР);
- блок моделирования сканирования и диаграммы направленности антенны;
- блок оценки потенциала и вероятности обнаружения;
- блок оценки потенциальных ошибок определения координат;
- блок синхронного вывода информации;
- блок следящей фильтрации;
- блок оценки эффективности.
В блоке имитации траектории движения цели происходит вычисление реальных координат цели с флуктуирующей ЭПР при осуществлении ее движения вблизи РЛС. В блоке реализована возможность вычисления прямоугольных координат БПЛА. В качестве эталонной траектории движения БПЛА выбран облет территории охраняемого объекта по эллипсу с периодическим изменением высоты полета, что является наиболее сложным случаем с точке зрения осуществления следящей фильтрации обнаружений цели РЛС.
Эллиптическое движение тела в системах координат XY описывается выражением:
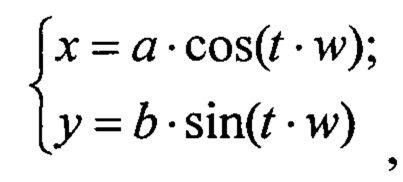 где
где
а, b - величины большой и малой полуосей эллипса;
t - время полета цели;
w - угловая скорость БЛА, которую можно найти из
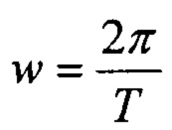
где Т - время прохождения целью полного эллипса, определяется решением неполного эллиптического интеграла второго рода:
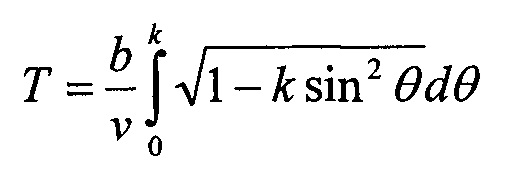

Где ν - линейная скорость движения цели; θ - азимут на цель.
Высота цели изменяется по синусоидальному закону согласно выражению:
где h0 - начальная высота полета цели;
Δh - перепад высот при маневрировании;
N - количество интервалов набора/сброса высоты.
Входными данными для блока имитации траектории движения цели являются тип цели, ее скорость и курс движения. Результатом работы блока имитации траектории движения цели являются координаты цели в прямоугольной и сферической системах координат с нулем, расположенным в месте расположения РЛС.
В блоке флуктуаций ЭПР проходит оценка мгновенного значения ЭПР цели на каждом из обнаружений РЛС. Значение ЭПР определяется выражением:
где σaν - ожидаемое значение ЭПР цели (-20 дБм);
u1 и u2 - случайные значения, подчиняющиеся нормальному распределению с математическим ожиданием, равным нулю и СКО равным единице.
Входными данными для блока флуктуаций ЭПР является ожидаемое значение ЭПР цели, результатом работы - мгновенное значение ЭПР цели.
В блоке моделирования сканирования и диаграммы направленности антенны происходит оценка формы диаграммы направленности антенны в процессе сканирования радиолокационной станцией. Оценка происходит в соответствии с выражением:

где θ0.5 - ширина диаграммы направленности антенны по уровню минус 3 дБ в выбранной плоскости; θ - отклонение от центра.
Результатом работы блока моделирования сканирования и диаграммы направленности антенны является массив, представляющий собой дискретное представление положений луча РЛС при сканировании, выполненный с эквидистантным шагом выраженным в дифференциальном фазовом сдвиге на единицу младшего разряда обмена информацией с АФАР. Пересчет углового положения луча в дифференциальный фазовый сдвиг осуществляется по формуле:

ƒ - значение литерной частоты;
с - скорость света;
р - угол отклонения луча от нормали антенны.
Использование в массиве положений луча эквидистантного шага дифференциального фазового сдвига позволяет учитывать расширение луча при перемещении от центра к краю сектора сканирования.
В блоке моделирования сканирования и диаграммы направленности антенны также рассчитывается массив разностной ДНА по углу места исходя из формулы:
где ϕ0.5 - ширина диаграммы направленности антенны по уровню минус 3 дБ в угломестной плоскости; ϕ - отклонение от центра в угломестной плоскости.
Из полученного массива блоком моделирования сканирования и диаграммы направленности антенны выделяется однозначная зона пеленгационной характеристики.
Результатами работы блока моделирования сканирования и диаграммы направленности антенны является массив положений луча при сканировании станции и массив, описывающий однозначную зону пеленгационной характеристики.
В блоке оценки потенциала и вероятности обнаружения происходит вычисление отношения сигнал-шум на обнаружителе радиолокационной станции, определение вероятности обнаружения цели с учетом флуктуаций ее ЭПР по третьему типу Сверлинга и принимается решение о факте обнаружения цели на текущем интервале когерентного накопления информации.
Отношение сигнал-шум на обнаружителе радиолокационной станции вычисляется из формулы:

где R - дальность до объекта наблюдения; λ - длинна волны излучаемого СВЧ колебания;  - коэффициенты усиления антенны на прием и передачу соответственно;
- коэффициенты усиления антенны на прием и передачу соответственно;  - массив нормированных значений ДНА на прием и передачу в азимутальной и угломестной плоскости;
- массив нормированных значений ДНА на прием и передачу в азимутальной и угломестной плоскости;  - импульсная мощность излучаемой в пространство СВЧ энергии; K - коэффициент накопления импульсов; σ(t) - текущее значение ЭПР цели; W(T) - зависимость чувствительности приемника от температуры:
- импульсная мощность излучаемой в пространство СВЧ энергии; K - коэффициент накопления импульсов; σ(t) - текущее значение ЭПР цели; W(T) - зависимость чувствительности приемника от температуры:

где k - постоянная Больцмана; Т - температура приемника; В - ширина полосы пропускания приемника; F(T) - зависимость коэффициента шума малошумящего усилителя от температуры;
L(R) - потери при распространении и обработке радиолокационного сигнала:
L(R)=Lц⋅П⋅N(R)
где Lц - потери в циркуляторе; П - потери при цифровой обработки информации; N(R) - потери на распространение сигнала для выбранного диапазона волн.
На основании рассчитанного отношения сигнал-шум и заданной вероятности ложной тревоги блок оценки потенциала и вероятности обнаружения автоматически проводит расчет текущей вероятности обнаружения цели по формуле:

где  - количество обрабатываемых интервалов когерентного накопления информации от цели (формула справедлива для одного и двух обрабатываемых когерентных интервалов накопления), Vt - порог обнаружения цели, который находится из рекурсивной формуле, используемой в методе Ньютона-Рапсона:
- количество обрабатываемых интервалов когерентного накопления информации от цели (формула справедлива для одного и двух обрабатываемых когерентных интервалов накопления), Vt - порог обнаружения цели, который находится из рекурсивной формуле, используемой в методе Ньютона-Рапсона:

где m - номер шага итерации.
G(Vt,m-1) и G/ (Vt,m-1) - функции, определяемые формулами:

где  - неполная гамма-функция;
- неполная гамма-функция;
Vt - порог обнаружения;
nƒa - количество ложных тревог.
Итерация заканчивается, когда |Vt,m-Vt,m-1|<Vt,m-1/10000.0.
Результатами работы блока оценки потенциала и вероятности обнаружения является определение факта обнаружения цели в текущем когерентном интервале накопления, зависящее от полученной вероятности обнаружения цели. В случае обнаружения цели в блок оценки потенциальных ошибок определения координат передается значение отношения сигнал-шум и координаты цели.
В блоке оценки потенциальных ошибок определения координат происходит оценка и добавление случайного значения ошибки определения координат цели РЛС, определенной с учетом моноимпульсной пеленгации положения цели и текущего значения сигнал-шум, к координатам цели, смоделированным в блоке имитации траектории движения цели.
Значения среднеквадратического отклонения (СКО) угловых ошибок определения положения цели находятся в соответствии с формулами:

где σθ(R) - зависимость СКО определения азимута цели от дальности, σϕ(R) - зависимость СКО определения угла места на цель от дальности, θ0.5 - ширина ДНА в азимутальной плоскости, ϕ0.5 - ширина ДНА в угломестной плоскости.
Значение CKO ошибки определения дальности до цели принимается равным четверти канала дальности радиолокационной станции.
Полученные значения СКО определения направления и дальности цели используются для генерации случайных значений, подчиненных нормальному закону распределения с нулевым значением математического ожидания, которые добавляются к реальным сферическим координатам цели. Координаты цели, учитывающие ошибку определения положения цели радиолокационной станцией и значение сигнал-шум передаются на блок синхронного вывода информации.
Блок синхронного вывода информации построен на основе сигнального процессора и позволяет перенаправлять смоделированные в предыдущих блоках результаты работы радиолокационной станции (координаты цели, каналы дальности и скорости, отношение сигнал-шум) в систему вторичной обработки с тактом, задаваемым по внешней команде. Значение данного такта позволяет имитировать длительность интервала когерентной обработки информации РЛС.
В блоке следящей фильтрации в процессе работы устройства реализовывается обработка полученных координат и амплитуд цели полиномиальным фильтром с угасающей и растущей памятью, фильтром Бенедикта-Борднера. В качестве эталонного способа установки весовых коэффициентов блока следящей фильтрации для оценки эффективности используется матричная система следящих фильтров Калмана, учитывающая энергетические параметры РЛС. Работа данной системы в блоке следящей фильтрации описана следующей последовательностью действий:
1. Инициализация траектории движения цели:
1.1 Прием из блока синхронного вывода информации об амплитуде сигнала в каналах дальности и скорости матрицы Z(k), в случае обнаружения цели.
1.2 Заполнение столбца n матрицы обнаруженной траектории цели, где n - номер обнаружения цели.
Y(1,n)=Rn,
Y(2,n)=ϕ,
Y(3,n)=θ,
где Rn - дальность до цели.
1.3 Перевод координат обнаруженной цели из сферической системы в прямоугольную.
Yx(1, n)=Rncosϕcosθ
Yx(2, n)=Rncosϕsinθ
Yx(3, n)=Rnsinϕ
1.4 Заполнение первой строки матрицы фильтрации.
Xƒ(1,1)=Yx(1,1)
Xƒ(2,1)=νmax,
Xƒ(3,1)=Yx(2,1)
Xƒ(4,1)=νmax,
Xƒ(5,1)=Yx(3,1)
Xƒ(6,l)=νmax,
где νmax - максимальная линейная скорость движения цели.
1.5 Установка окна обнаружения цели на следующем сканировании для инициации траектории.
Xƒ(1:6,2)=F⋅X(1:6,1),
Yx(1,2)=Xƒ(1,2)±3σx
Yx(2,2)=Xƒ(3,2)±3σy
Yx(3,2)=Xƒ(5,2)±3σz
где Т - дискрет обновления информации о цели, окно ожидаемой позиции цели на следующем сканировании выставляется исходя из трех СКО ошибки обнаружения цели на заданной дальности.
1.6 Задается первичная ковариационная матрица ошибок следящего фильтра, значения которой приравнены к ошибкам определения координат РЛС:
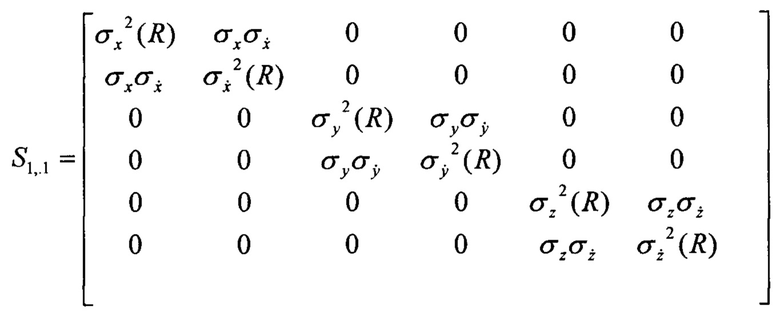
где значения типа σ σ - ковариации между двумя величинами, связанными в случае обнаружения их РЛС в сферической системе координат.
1.7 Задается матрица динамической ошибки модели движения цели Qn.

2. Следящая фильтрация положения цели в процессе ее сопровождения.
2.1 На каждом обнаружении цели задается матрица ошибок измерения РЛС Rn и матрица соответствия измеренных координат координатам следящего фильтра М.

где σх, σy, σz - потенциальные СКО определения координат цели.
2.2 Обновляется ковариационная матрица ошибок следящего фильтра предыдущего измерения и задается новая матрица ошибок следящего фильтра.
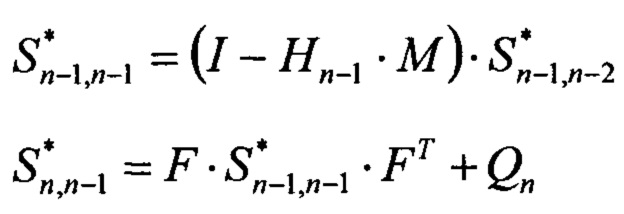
где I - единичная матрица;
Hn-1 - матрица весовых коэффициентов на (n-1) обнаружении цели.
2.3 Задается матрица текущих весовых коэффициентов следящего фильтра Н
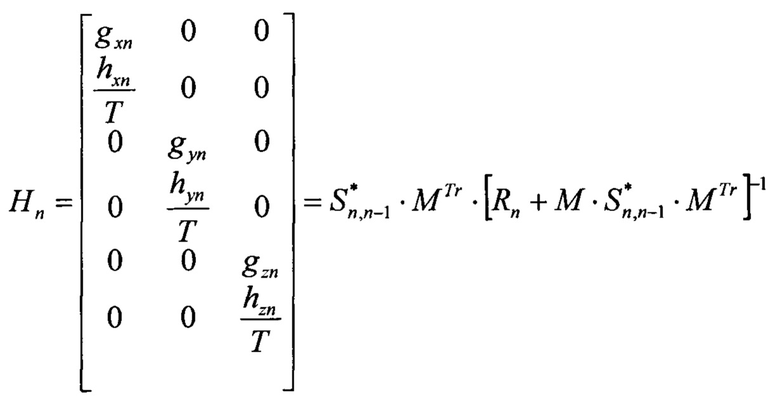
где Tr - оператор транспонирования матрицы;
Rn - матрица ошибок измерения радиолокационной станции;
 - ковариационная матрица ошибок измерения следящего фильтра;
- ковариационная матрица ошибок измерения следящего фильтра;
hzn - коэффициент h следящей фильтрации координаты Z цели на обнаружении номер n.
2.4 Осуществляется следящая фильтрация показаний РЛС.

2.5 Происходит предсказание положения цели в момент обнаружения n+1 через время обзора Т.
2.6 Выставляется окно обнаружения цели на следующем сканировании.
Полученные результаты работы блока следящей фильтрации совместно с результатами работы блока имитации траектории движения цели передаются в блок оценки эффективности. В качестве критерия эффективности используется значение среднего по траектории отклонения координат цели, вычисленных блоком следящей фильтрации от координат, заданных в блоке имитации движения цели.
где Xrn - матрица результатов работы блока имитации движения цели;  - матрица результатов работы следящего фильтра; N - количество когерентных интервалов накопления информации о цели;
- матрица результатов работы следящего фильтра; N - количество когерентных интервалов накопления информации о цели;  - среднее на траектории отклонение положения цели, определенного системой следящей фильтрации от реального.
- среднее на траектории отклонение положения цели, определенного системой следящей фильтрации от реального.
В блоке оценки эффективности сравнивается значение среднего на траектории отклонения положения цели, определенного блоком следящей фильтрации при помощи текущего способа следящей фильтрации, эталонного фильтра (матричная система фильтра Калмана с учетом энергетических характеристик РЛС), фильтров Бенедикта-Борднера и полиномиальных фильтров, после чего, основываясь на величине отклонения, делается вывод об оптимальном методе установки весовых коэффициентов для сопровождения данного типа целей при заданных параметрах РЛС.
На этом работа предложенного устройства оптимизации весовых коэффициентов следящей фильтрации завершается.
На фиг. 1 представлена блок-схема заявляемого устройства оптимизации весовых коэффициентов следящей фильтрации, где:
1 - блок имитации траектории движения цели;
2 - блок флуктуации эффективной поверхности рассеивания;
3 - блок оценки потенциала и вероятности обнаружения;
4 - блок моделирования сканирования и диаграммы направленности антенны;
5 - блок оценки потенциальных ошибок определения координат;
6 - блок синхронного вывода информации;
7 - блок следящей фильтрации;
8 - блок оценки эффективности.
Заявляемое устройство оптимизации весовых коэффициентов следящей фильтрации содержит последовательно соединенные блок имитации траектории движения цели 1, блок оценки потенциала и вероятности обнаружения 3, блок оценки потенциальной ошибки определения координат 5, блок синхронного вывода информации 6, блок следящей фильтрации 7, блок оценки эффективности 8, а к входам блока оценки потенциала и вероятности обнаружения 3 также подключены блоки флуктуации эффективной поверхности рассеивания 2 и моделирования сканирования и диаграммы направленности антенны 4.
На вход заявляемого устройства оптимизации весовых коэффициентов следящей фильтрации через блок имитации траектории движения цели 1 подается информация о типе цели, ее скорости, виде траектории и начальных координатах, на выходе устройства оптимизации весовых коэффициентов следящей фильтрации определяется среднее на траектории отклонение положения цели, определенного блоком следящей фильтрации.
Разработанное устройство оптимизации весовых коэффициентов следящей фильтрации отличается тем, что к блоку следящей фильтрации добавлены блоки оценки потенциала и вероятности обнаружения, флуктуации эффективной поверхности рассеивания и моделирования, сканирования и диаграммы направленности антенны и блок оценки эффективности, что позволяет учитывать в оценке эффективности работы блока следящей фильтрации изменяющиеся во времени параметры радиолокационной станции, которая проводит обнаружение цели.
Заявляемое устройство оптимизации весовых коэффициентов следящей фильтрации работает следующим образом.
Определяется тип и начальные параметры движения цели, для которой будет проводится оптимизация коэффициентов следящей фильтрации, эти данные поступают на вход блока имитации траектории движения цели 1, где с тактом, соответствующим интервалу когерентного накопления информации РЛС происходит моделирование координат движущейся цели, после чего данные координаты поступают на вход блока оценки потенциала и вероятности обнаружения 3, который по запросу получает из блоков флуктуации эффективной поверхности рассеивания 2 и моделирования сканирования и диаграммы направленности антенны 4 данные об эффективной поверхности рассеивания цели, текущем положении луча, форму диаграммы направленности антенны для учета их значений при расчете отношения сигнал-шум, используемом для обнаружения цели на заданном интервале когерентного накопления информации о ней. Данные о текущем отношении сигнал-шум впоследствии используются блоком 3 для определения текущей вероятности обнаружения на основе определенного им по рекурсивной формуле порога обнаружения цели. На основании текущей вероятности обнаружения цели блок оценки потенциала и вероятности обнаружения делает вывод о наличии факта обнаружения цели на текущем интервале когерентного накопления информации о ней. В случае, если сигнал от цели прошел пороговый обнаружитель, информация о ее текущих координатах и отношении сигнал-шум, используемом для ее обнаружения подается на вход блока оценки потенциальной ошибки определения координат 5, где, учитывая моноимпульсный прием сигнала о цели в угломестной и азимутальной плоскости и форма диаграммы направленности антенны, происходит расчет среднеквадратического отклонения определения угловых координат цели. При получении сферических координат цели блоком оценки потенциальных ошибок определения координат 5 формируются случайные величины, подчиненные нормальному закону распределения с нулевым математическим ожиданием и среднеквадратическим отклонением, равным среднеквадратическому отклонению определения угловых координат цели, значения данных величин добавляются к текущим координатам цели в сферической системе координат. Данные значения наряду с текущим отношением сигнал-шум передаются блоком 5 на блок синхронного вывода информации 6. Блок 6 построен на основе сигнального процессора и отвечает за синхронную (с интервалом когерентного накопления информацию) передачу информации о координатах цели (с учетом ошибки определения положения цели) и отношении сигнал шум в блок следящей фильтрации 7. Блок следящей фильтрации 7 проводит следящую фильтрацию показаний радиолокационной станции полиномиальным фильтром с угасающей и растущей памятью, фильтром Бенедикта-Борднера, и использует в качестве эталонного следящего фильтра матричный фильтр Калмана, учитывающего в своей работе текущие значения энергетического потенциала радиолокационной станции. Результатом работы блока 7 являются матрицы значений следящей фильтрации показаний радиолокационной станции  полученные реализуемыми методами следящей фильтрации. Матрицы
полученные реализуемыми методами следящей фильтрации. Матрицы  передаются в блок оценки эффективности 8, где происходит расчет
передаются в блок оценки эффективности 8, где происходит расчет  - среднего на траектории отклонения положения цели, определенного системой следящей фильтрации от реального и на основании значения
- среднего на траектории отклонения положения цели, определенного системой следящей фильтрации от реального и на основании значения  выбираются оптимальные весовые коэффициенты и фильтр, используемый для их установки.
выбираются оптимальные весовые коэффициенты и фильтр, используемый для их установки.
Использование устройства оптимизации весовых коэффициентов следящей фильтрации, по имеющимся в распоряжении авторов записям реальных траекторных измерений полета объектов при радиолокационном сопровождении, позволяет эффективно определять тип следящего фильтра для сопровождения цели, что, в свою очередь, позволяет повысить точность и достоверность разведывательной информации радиолокационной станции и существенно уменьшить ошибку определения координат цели на траектории движения.
Использование устройства оптимизации весовых коэффициентов следящей фильтрации, по имеющимся в распоряжении авторов записям реальных траекторных измерений полета объектов при радиолокационном сопровождении, позволяет эффективно определять тип следящего фильтра для сопровождения цели, что, в свою очередь, позволяет повысить точность и достоверность разведывательной информации радиолокационной станции и существенно уменьшить ошибку определения координат цели на траектории движения.
ЛИТЕРАТУРА
1. Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М.: Сов. радио, 1974.
2. Кузьмин С.З. Цифровая радиолокация. Введение в теорию - Киев.: 2000.: Компьютерно-издательский информационный центр (КВ1Ц), 2000. 428 с.
3. Патент РФ на изобретение №2452080 «Цифровой многоитерациональный фильтр». МПК: Н03Н 17/04 (2006.01) G06F 17/17 (2006.01).
4. Патент РФ на изобретение №2747199 «Цифровой фильтр нестационарных сигналов». МПК: Н03Н 17/04(2006.01) Н03Н 21/00 (2006.01).
5. Патент РФ на изобретение №2713627 «Вычислитель экстрополированной координаты и скорости ее изменения по методу наименьших квадратов». МПК: G01S 13/06 (2006.01).
6. Merrill I. Skolnik. Introduction to Radar Systems. Third edition. Electronic Industry Press., N.Y., 2014. 762 p.
7. Bassem R. Mahafza, Radar systems analysis and design using Matlab. Chapman & Hall/CRC, 2000, 533 p.ISBN 1-58488-182-8
8. Eli Brookner. Tracking and Kalman filtering made easy. Wiley-Interscience, 1998,504 p.ISBN 10:0471184071
9. Г.А. Валихин «Следящий фильтр для РЛС, построенной на нитрид-галлиевой технологии» Электронная техника. Серия 2. Полупроводниковые приборы. Выпуск 1 (256) 2020, с. 17-26.
10. Е.И. Минаков, Г.А. Валихин «Вероятность радиолокационного обнаружения флуктуирующих целей» Известия ТулГУ. Технические науки, 2016. Вып 12, с. 159-163.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ | 2007 |
|
RU2364887C2 |
| СПОСОБ АДАПТИВНОГО СОПРОВОЖДЕНИЯ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2679598C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА МЕСТА НИЗКОЛЕТЯЩЕЙ ЦЕЛИ И МОНОИМПУЛЬСНАЯ РЛС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2802886C1 |
| СПОСОБ И СИСТЕМА СОВМЕСТНОЙ ОБРАБОТКИ ИЗМЕРЕНИЙ ДАЛЬНОСТИ И СКОРОСТИ ДЛЯ МНОГОДИАПАЗОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ КРУГОВОГО ОБЗОРА | 2014 |
|
RU2572079C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИЗМЕРЕНИЯМ ИХ НЕСУЩЕЙ ЧАСТОТЫ | 2021 |
|
RU2776078C1 |
| СПОСОБ ВЫБОРА ОПТИМАЛЬНОЙ ПРОДОЛЖИТЕЛЬНОСТИ ИНТЕРВАЛА СИНТЕЗИРОВАНИЯ В РАДИОЛОКАЦИОННОЙ СТАНЦИИ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2008 |
|
RU2378662C1 |
| Радиолокационный способ обнаружения и определения параметров движения маловысотных малозаметных объектов в декаметровом диапазоне радиоволн | 2016 |
|
RU2669702C2 |
| Имитатор радиолокационных целей | 2021 |
|
RU2787576C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ НА БАЗЕ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ С УПРАВЛЯЕМЫМИ ПАРАМЕТРАМИ ИЗЛУЧЕНИЯ | 2013 |
|
RU2543511C1 |
| СПОСОБ И УСТРОЙСТВО ИМИТАЦИИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2011 |
|
RU2489753C2 |

Изобретение относится к области радиолокации. Техническим результатом изобретения является повышение точности и достоверности разведывательной информации радиолокационной станции и уменьшение ошибки определения координат цели на траектории движения. Такой результат достигается за счет использования устройства оптимизации весовых коэффициентов следящей фильтрации, состоящего из блоков: имитации траектории движения цели, флуктуации эффективной поверхности рассеивания, моделирования сканирования и диаграммы направленности антенны, оценки потенциала и вероятности обнаружения, оценки потенциальных ошибок определения координат, синхронного вывода информации, следящей фильтрации и оценки эффективности. 1 ил.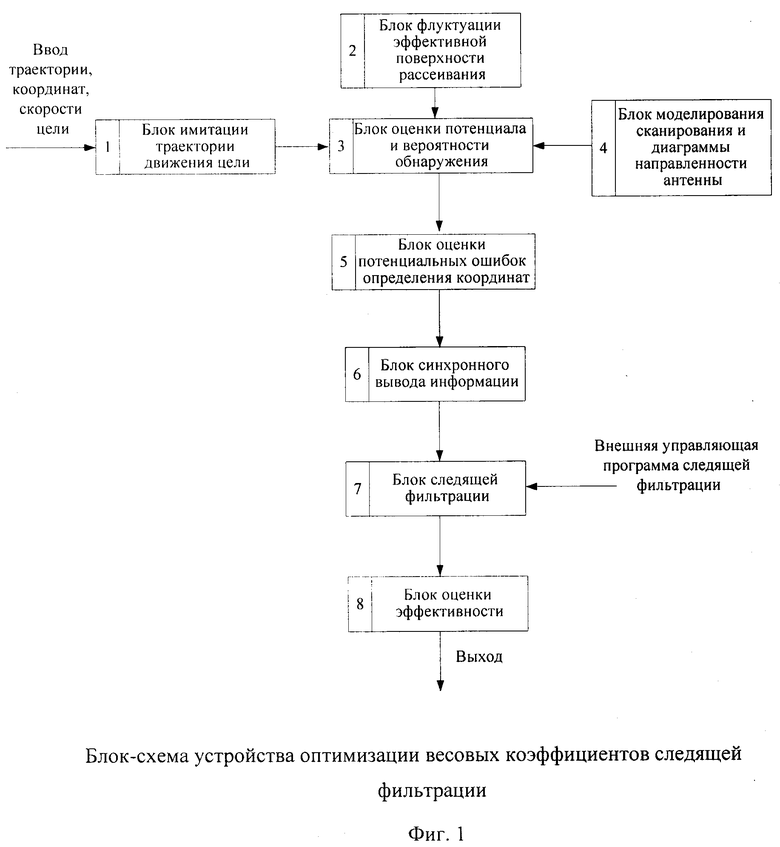
Устройство оптимизации весовых коэффициентов следящей фильтрации, отличающееся тем, что в блоке имитации траектории движения цели на основе заданных траектории координат и скорости цели происходит моделирование координат цели на траектории, выход блока имитации траектории движения цели соединен с блоком оценки потенциала и вероятности обнаружения, который, с учетом полученной информации от блока имитации траектории движения цели, блока флуктуации эффективной поверхности рассеивания и блока моделирования сканирования и диаграммы направленности антенны, принимает решение о факте обнаружения цели в текущем интервале когерентного накопления информации и получения значения сигнал-шум по цели с флуктуирующей эффективной поверхности рассеивания, выход блока оценки потенциала и вероятности обнаружения цели соединен с входом блока оценки потенциальных ошибок определения координат, в котором на основании текущих координат цели и отношении сигнал-шум высчитывается среднеквадратическое отклонение определения сферических координат цели, которые используются для генерации случайных величин, добавляемых к текущим координатам цели, выход блока оценки потенциальных ошибок определения координат соединен с блоком синхронного вывода информации, который позволяет синхронно направлять в блок следящей фильтрации данные о текущем отношении сигнал-шум и координатах обнаруженной цели, в блоке следящей фильтрации происходит следящая фильтрация координат цели полиномиальным фильтром с угасающей и растущей памятью, фильтром Бенедикта-Борднера и матричной формой фильтра Калмана, учитывающей текущие энергетические характеристики радиолокационной станции, выход блока следящей фильтрации соединен с блоком оценки эффективности, где на основании среднего на траектории отклонения положения цели, определенного блоком следящей фильтрации, от реального положения, делается вывод об оптимальных весовых коэффициентах и фильтре, используемом для их установки.
| Минаков Е.И., Валихин Г.А., Овчинников А.В., Матвеева С.С | |||
| "Следящая фильтрация показаний радиолокационной станции при обнаружении БПЛА", Изв | |||
| вузов | |||
| Электроника, 2021, Т.26 | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Ветряный двигатель | 1922 |
|
SU554A1 |
| АДАПТИВНЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2012 |
|
RU2492506C1 |
| ВЫЧИСЛИТЕЛЬ ЭКСТРОПОЛИРОВАННОЙ КООРДИНАТЫ И СКОРОСТИ ЕЁ ИЗМЕНЕНИЯ ПО МЕТОДУ НАИМЕНЬШИХ КВАДРАТОВ | 2018 |
|
RU2713627C1 |
| US 20070230593 A1, 04.10.2007 | |||
| CN 103616671 B, 24.02.2016 | |||
| US 7675458 B2, 09.03.2010. | |||

