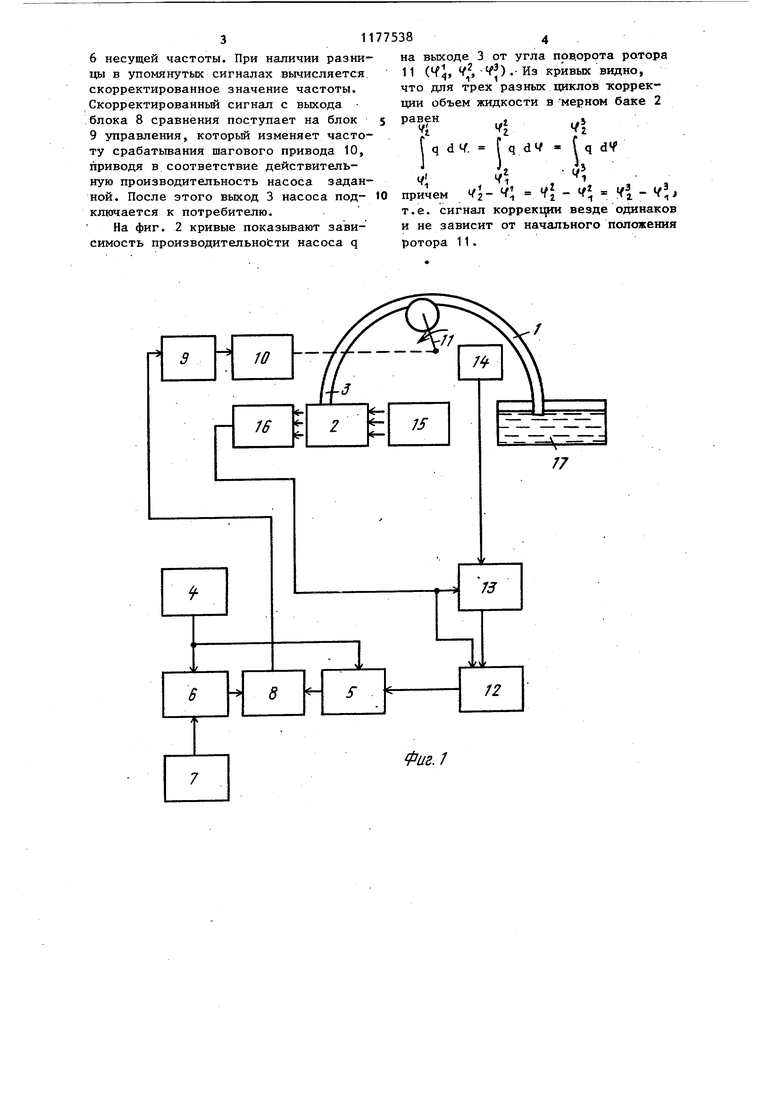
Изобретение относится к насосостроению, касается систем управления перистальтическими насосами-дозаторами и может найти применение в различных отраслях народного хозяйства для дозированной подачи активных, абразивных, биологических и других текучих сред. Цель изобретения - повьппение точности регулирования производительности насоса. На фиг. 1 представлена предлагаемая система; на фиг. 2 - графики зависимости производительности насоса от угла поворота ротора для трёх различных начальных его положений (а,б,в). . Система управления перистальтическим насосом с эластичным рабочим органом 1 содержит мерный бак 2, подключенный к выходу 3 насоса, генератор 4, преобразователь 5 частоты коррекции, подключенный к выходу генератора 4, преобразователь 6 несущей частоты, подключенньй одним из входов к выходу генератора 4, а Другим - к задатчику 7 производительности насоса, блок 8 сравнения и блок 9 управления шаговым приводом 10 ротора 11 насоса. Вход блока 9 управления связан с выходом блока 8 сравнения, к входам которого подключены преобразователи 5 и 6 соответственно частоты коррекции и несущей частоты. Система снабжена а.мплитудно временным преобразователем 12,,таймером 13, датчиком 14 полного оборота ротора 11,осветителем 15 и оптиче ки связанным с ним позиционно-чувств тельным фотоприемником 16,выход KOTO рого подключен к входу амплитудно-вр менного преобразователя 12 и к одному и входов таймера 13, другим входом связанного с датчиком 14 полного обо рота IpoTopa 11. Таймер 13 своим выхо дом связан с входом амплитудно-временного преобразователя 12, подключе но.го выходом к другому входу преобра зователя 5 частоты коррекции. Мерньй бак 2 вьшолнен из оптически прозрачного материала и расположен между осветителем 15 и позихщонно-чувствительным фотоприемником 16. Эластичньй рабочий орган 1 насоса подключен к питающей емкости 17 с перекачивавмой средой. Систе.1а управления работает следующим образом. Генератор 4 вырабатьгоает несущую частоту, которая поступает в преобразователь 5 частоты коррекции и в преобразователь 6 несущей частоты. В преобразователе 6 несущая частота изменяется по сигналу от задатчика 7 производительности насоса. С выхода преобразователя 6 несущей частоты частотно-модулированньй сигнал подается на вход блока 8 сравнения. Сиг- нал с выхода последнего поступает на блок 9 управления, которьй задает частоту срабатывания щагового привода 10. Шаговьй привод 10 приводит во вращение ротор 11, которьй последовательно пережимает зластичньй рабочий орган 1 и перемещает по нему жидкость из питающей емкости 17 на выход 3 насоса. В начальный период работы к выходу 3 насоса подключается мерньй бак 2, который начинает заполняться жидкостью, перекрывающей поток света от осветителя 15 к позиционно-чувствительному фотоприемнику 16. При этом сигнал с выхода позиционно-чувствительного фотоприемника 16 устанавливает таймер 13 в исходное состояние. Первьй импульс, сформированньй датчиком 14 полного оборота ротора 11, запустит таймер 13, а второй импульс после поворота ротора 11 на 360° остановит таймер 13. Сформированньй на выходе последнего сигнал, длительность которого равна времени полного оборота ротора 11, поступает на вход амплитудновременного преобразователя 12, на другой вход которого подается сигнал с выхода позиционно-чувствительного фотоприемника 18. Амплитудно-временной преобразователь 12 формирует импульсньй сигнал, длительность которого пропорциональна объему заполнения мерного бака 2 за полный оборот ротора 11. Этот сигнал поступает на один вход преобразователя 5 частоты коррекции, а на другой вход последнего подается несущая частота с выхода генератора 4. Преобразователь 5 частоты коррекции формирует частотновременной сигнал по длительности равньй длительности импульсного сигнала на выходе амплитудно-временного преобразователя 12. Этот сигнал поступает на вход блока 8 сравнения, где сравнивается с частотно-временным сигналом, пропорциональным заданному времени заполнения мерного бака 2 и снимаемым с выхода преобразователя 31 6 несущей частоты. При наличии разнИ цы в упомянутых сигналах вычисляется скорректированное значение частоты. Скорректированный сигнал с выхода блока 8 сравнения поступает на блок 9 управления, которьй изменяет частоту срабатьгоания шагового привода 10, приводя в соответствие действительную производительность насоса заданной. После этого выход 3 насоса подключается к потребителю. На фиг. 2 кривые показьгаают зависимость производительноЬти насоса q 38 на выходе 3 от угла прв.орота ротора 11 (Ч, Ч - Ч) . Из кривых видно, что для трех разнык циклов -коррекции объем жидкости в мерном баке 2 равен , Vi V| Ud. причем - 4 - , т.е. сигнал коррекции везде одинаков и не зависит от начального положения ротора 11.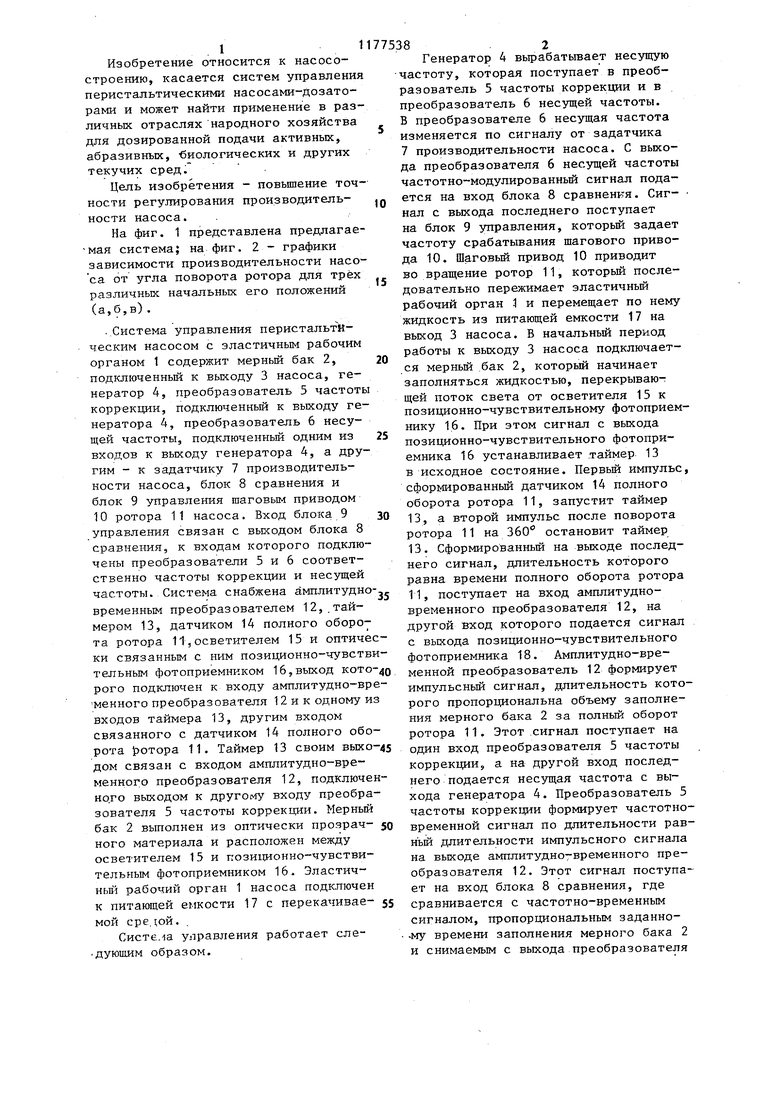
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления перистальтическим насосом | 1978 |
|
SU901620A1 |
| Дозирующий насос | 1978 |
|
SU960752A1 |
| Регулятор уровня жидкости | 1979 |
|
SU960753A1 |
| Система управления перистальтическим насосом | 1986 |
|
SU1344940A1 |
| Устройство для измерения диаметра изделий | 1987 |
|
SU1730537A1 |
| Устройство для измерения угла поворота вала | 1990 |
|
SU1772629A1 |
| Измерительное устройство к балансировочному станку | 1986 |
|
SU1326927A1 |
| Устройство для определения радиуса качения упругого колеса | 1989 |
|
SU1786371A1 |
| Устройство для регистрации индикаторных диаграмм поршневых машин | 1988 |
|
SU1597634A1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ДЛЯ НАСТРОЙКИ И ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ БУМАГОДЕЛАТЕЛЬНЫХ МАШИН (ВАРИАНТЫ) | 2005 |
|
RU2294997C1 |
СИСТЕМА УПРАВЛЕНИЯ ПЕРИСТАЛЬТИЧЕСКИМ НАСОСОМ с-эластичным рабочим органом, содержащая мерньш бак, подключенньй к вькоду насоса, генератор, преобразователь частоты коррекции, подключенный к выходу генератора, преобразователь несущей частоты, подключенньй одним из входов к выходу генератора, а другим - к задатчику производительности насоса, блок сравнения и блок управления шаговым приводом ротора насоса, вход которого связан с выходом бло1са сравнения, к входам которого подключены преобразователи частоты коррекции и несущей частоты, отличающаяся тем, что., с целью повышения точности регулирования производительности насоса, она снабжена амплитудно-временным преобразователем, таймером, датчиком полного оборота ротора, осветителем и оптически связанным с ним позиционно-чувствительным фотоприемником, выход которого подключен к входу амплитудновременного преобразователя и к одному из входов таймера, другим входом связанного с датчиком полного оборота ротора, а выходом - с входом (Л амплитудно-временного преобразователя, подключенного выходом к другому входу преобразователя частоты коррекции, причем мерный бак выполнен из оптического прозрачного материала и расположен между осветителем и позиционно-чувствительным фото l приемником. М О1 О9 00
h 4. МЛ/рад
f/
//
у/
Ш
//
//
// рад
Y
// /I
//
(У1
Г/
у/ /
Фиг. 2
| Система управления перистальтическим насосом | 1978 |
|
SU901620A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
