Изобретение относится к балансировочной технике и может быть использовано в балансировочных станках,станках-автоматах и автоматических линия при балансировке в полярной системе координат,, когда дисбаланс ротора не может быть скомпенсирован внесением дисбаланса по одной оси коррекции, и имеется необходимость введения дополнительных осей коррекции.
Цель изобретения - повышение производительности за счет создания условий автоматизации позиционирования по дополнительным осям коррекции, ,симметричным относительно центральной оси коррекции.
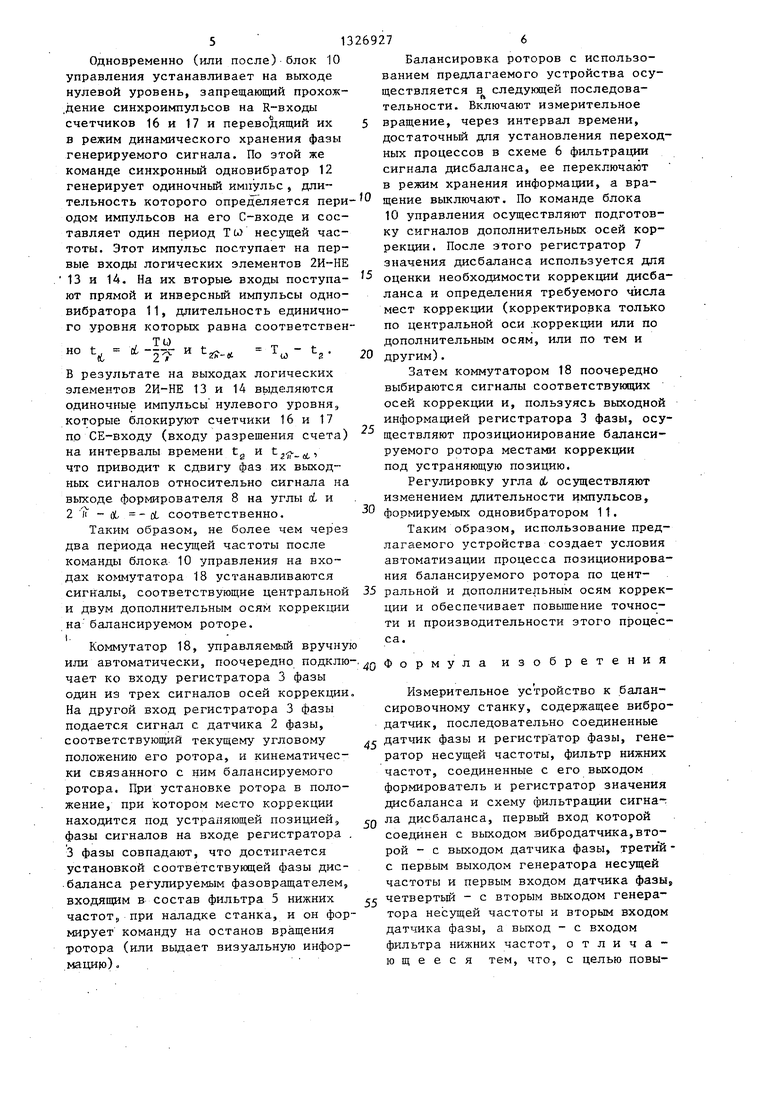
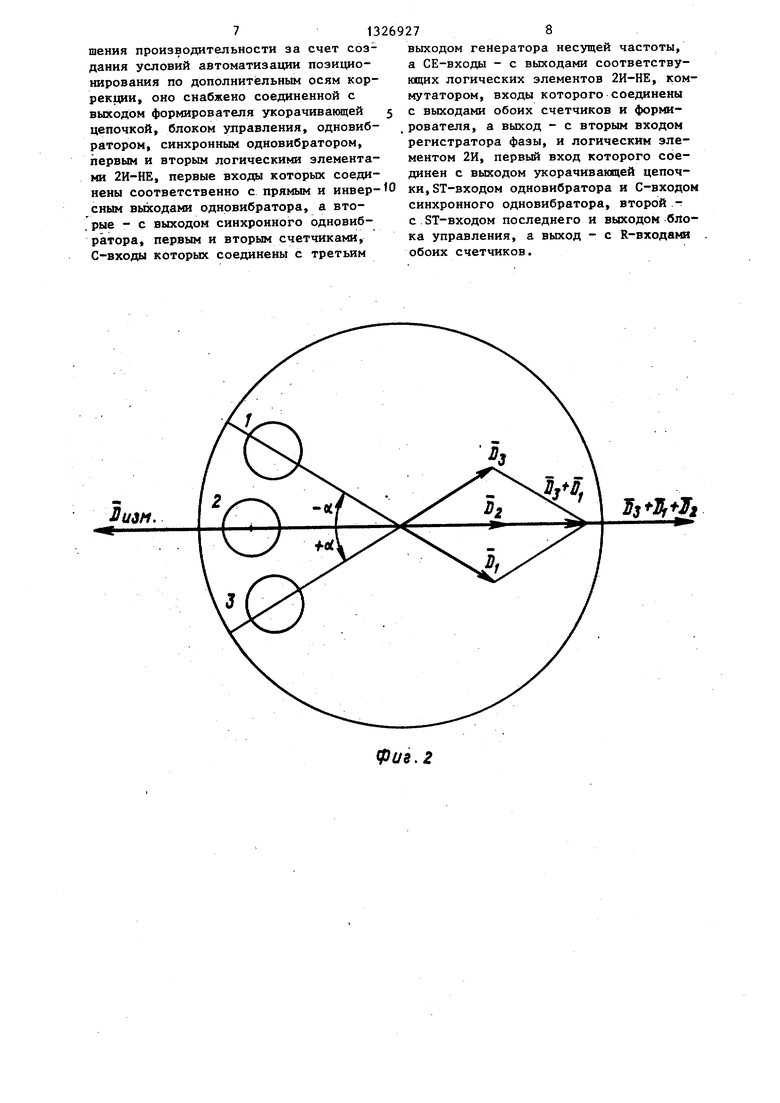
На фиг. 1 изображена структурная схема предлагаемого устройства; на фиг. 2 - векторная диаграмма, на которой показан пример компенсации дисбаланса балансируемого ротора путем устранения материала сверлением по центральной оси, противоположной вектору измеренного дисбаланса (), и двум дополнительным осям коррекции (дисбалансы, вносимые каждым из отверстий, обозначены соответственно Ъ, , Dj и Dj ; символами + ot и - d обозначены углы между дополнительными и центральными.осями коррекции на балансируемом роторе); на фиг. 3 - временные диаграммы, поясняющие работу основных элементов устройства (числа стоящие у начала каждой из осей орди нат временных диаграмм соответствуют позиционному обозначению элементов структурной схемы на фиг. 1).
Устройство содержит вибродатчик 1 датчик 2 фазы, регистратор 3 фазы, генератор 4 несущей частоты фильтр 51 нижних частот, схему 6 фильтрации сигнала дисбаланса, первьй вход которой соединен с вибродатчком 1, второй вход - с выходом датчика 2 фазы и регистратором 3 фазы, третий и чет- вертьй входы соответственно - с пер-вым и вторым выходами генератора 4 несущей частоты и с первым и вторым входами датчика 2 фазы, а выход - со входом фильтра 5 нижних частот, подключенные к выходу.фильтра 5 нижних частот, регистратор 7 значения дисбаланса и формирователь 8, укорачивающую цепочку 9, вход которой соединен с выходом формирователя 8, блок 10 управления, одновибратор 11, синхрон- ньй -одновибратор 12, первый 13 и второй 14 логические элементы 2И-НЕ,пер
5
0
0
5
вые входы которых соединены соответственно с прямым и инверсным выхода- . ми одновибратора.11, а вторые входы - с выходом синхронного одновибратора 12, логический элемент 2И 15, первый вход которого соединен с вьпсодом укорачивающей цепочки 9, С-входом синхронного одновибратора 12 и ST-входом одновибратора 11, а второй вход - с выходом блока 10 управления и ЗТ- ВХО- дом синхронного одновибратора 12,первьй 16 и второй 17 счетчики, СЕ-вхо- ды которых подключены соответственно к выходам логических элементов 2И-НЕ 13 и 14, R-входы соединены с выходом логического элемента 2И 15, а С-вхо- ды - между собой и с третьим выходом генератора 4 несущей частоты, и коммутатор 18, входы которого связаны с выходами счетчиков 16 и 17 и формирователя 8, а выход - со вторым входом регистратора 3 фазы.
Генера тор 4 несущей частоты может 5 быть выполнен, например, в виде последовательно соединенных генератора 19 импульсов, выход которого представляет собой третий выход генератора 4 несущей частоты, делителя 20 частоты и счетчика 21 Джонсона, выходы которого представляют собой соответственно первьш и второй выходы генератора 4 несущей частоты.
I
Схема 6 фильтрации сигнала дисбаланса может быть выполнена, например, в виде двух последовательньпс цепочек, включающих каждая фазовьй детектор 22(23), блок 24(25) памяти и ампли- 0 тудный модулятор 26(27), сумматора 28, вход которого представляет собой выход схемы 6 фильтрации сигнала дисбаланса, а входы подключены к выходам амплитудных модуляторов 26 и 27, третьего 29 и четвертого 30 фазовых детекторов, выходы которьк подключены соответственно к управлякмцим входам фазовых детекторов 22 и 23, соединенные информационные входы которых представляют собой первьй вход схемы 6 фильтрации сигнала дисбаланса,второй вход которой представляет собой соединенные информационные входы фазовых детекторов 23 и 30, третий - управлякщие входы фазового детектора . 29 и амплитудного модулятора 26, а четвертьй - управляющие входы фазового детектора 30 и амплитудного модулятора 27.
5
0
5
Формирователь 8 может быть выполнен, например, в виде нуль-комлара- тора.
В качестве датчика 2 фазы можно использовать, например, вращающийся трансформатор (или сельсин, при уело- ВИИ питания его трехфазным напряжением несущей частоты) в режиме фазовращателя с включенным на выходе фильт- ром нижних частот.
Синхронньш одновибратор 12 может быть выполнен, например, на двух D- триггерах и логическом элементе 2И.
В качестве регистратора 7 значения дисбаланса может использоваться, например, амплитудный детектор с включенным на выходе вольтметром постоянного тока или аналого-цифровым преобразователем, а регистратора 3 фазы - фазометр или фазовый дискриминатор (в автоматическом оборудовании).
Коммутатор 18 может быть реализован в .виде электронного или электромеханического переключателя.
Устройство работает следующим образом.
Измерение параметров дисбаланса осуществляют при вращении балансиру- емого ротора с частотой . При этом сигнал вибродатчика 1 подается на первый вход схемы 6 фильтрации сигнала дисбаланса, на второй вход которой поступает сигнал с выхода датчика 2 фазы, в качестве которого используется вращакщийся трансформатор (или сельсин) в режиме фазовращателя. Режим фазовращателя обеспечивается питанием обмоток вращающегося трансфор- матора ортогональными сигналами несущей частоты U . Формирует эти сигналы генератор 4 несущей частоты iJ . Вза- имньй сдвиг фаз (90°) сигналов на его первом и втором выходах обеспечивает- ся включением на его выходе двухразрядного счетчика 21 Джонсона, подключенного к выходу делителя 20 частоты.
Результирзпощий коэффициент N дели- теля частоты генератора 19 импульсов выбирается достаточно большим, чтобы обеспечить заданную точность поиска места коррекции. Например, при N . 360, точность определения места коррекции не более 1 .
Ортогональные сигналы несущей час тоты W поступают также на третий и
четвертый входы схемы 6 фильтрации сигнала дисбаланса, которая обеспечивает фильтрацию сигнала вибродатчика 1 и перенос его на несущую частотуcJ. Выделякнцийся при этом на выходе, схемы 6 фильтрации сигнала дисбаланса ана- лог последнего на несущей частоте содержит высшие гармоники из-за использования в описываемом примере выполнения устройства, генератора 4 несущей частоты с выходными сигналами прямоугольной . Подавление этих гармоник производит фильтр 5 нижних частот, на выходе которого выделяется синусоидальный сигнал несущей часто- ты, амплитуда и фаза которого несут информацию о значении и угле дисбаланса балансируемого ротора. Регистратор 7 значения дисбаланса осуществляет индикацию и (или) преобразова,ние в дискретную форму амплитуды сигнала дисбаланса.
Формирователь 8 преобразует синусоидальный сигнал дисбаланса в прямоугольные импульсы, которые при соот:ветствующем положении коммутатора 18 используются в качестве опорного сигнала регистратора 3 фазы для отыска ния на балансируемом роторе центральной оси коррекции. Опорные сигналы, соответствующие дополнительным осям коррекции, подаются на другие входы коммутатора 18 со счетчиков 16 и 17. Счетчики 16 и 17 тактируются по С- входам выходным сигналом генератора 19 импульсов. Так как коэффициент пересчета счетчиков 16 и 17 выбирается равным N, то генерируемь1е или прямоугольные импульсы (типа меандр) имеют частоту (л) . Их фаза задается короткими синхроимпульсами, которые поступают с выхода укорачивающей цепочки 9 через логический элемент 2И 15 на R- входы счетчиков 16 и 17.
Поэтому, пока логический элемент 2И 15 открыт единичным уровнем блока 10 управления, фаза выходных сигналов счетчиков 16 и 17 совпадает с фазой импульсов на выходе формирователя 8.
После окончания измерения параметров дисбаланса схема 6 фильтрации сигнала переключается в режим хранения информации (не показана). При этом на ее выходе сохраняется сигнал дисбаланса, перенесенный на несущую частоту U .
Одновременно (или после) блок 10 управления устанавливает на выходе нулевой уровень, запрещающий прохож- дение синхроимпульсов на R-входы счетчиков 16 и 17 и переводящий их 5 в режим динамического хранения фазы генерируемого сигнала. По этой же команде синхронный одновибратор 12 генерирует одиночный импульс , длительность которого определяется пери- одом импульсов на его С-входе и составляет один период Т и) несущей частоты. Этот импульс поступает на первые входы логических элементов 2И-НЕ 13 и 14. На их вторые входы поступают прямой и инверсньй импульсы одно- вибратора 11, длительность единичного уровня которых равна соответствен 5
но
t - d. Ч - 27
и t.
Т - со
-гл- со г
В результате на выходах логических элементов 2И-НЕ 13 и 14 выделяются одиночные импульсы нулевого уровня., которые блокируют счетчики 16 и 17 по СЕ-входу (входу разрешения счета на интервалы времени tg и , что приводит к сдвигу фаз их выходных сигналов относительно сигнала н выходе формирователя 8 на углы А и 2 - (t - (t соответственно.
Таким образом, не более чем чере два периода несущей частоты после команды блока 10 управления на входах коммутатора 18 устанавливаются
сигН:алы, соответствующие центральной 35 ральной и дополнительным осям коррек- и двум дополнительным осям коррекдаи на балансируемом роторе.
ции и обеспечивает повышение точности и производительности этого процесса.
Коммутатор 18, управляемый вручну или автоматически, поочередно подклю чает ко входу регистратора 3 фазы один из трех сигналов осей коррек1дии На другой вход регистратора 3 фазы подается сигнал с датчика 2 фазы, соответствующий текущему угловому положению его ротора, и кинематически связанного с ним балансируемого ротора. При установке ротора в положение, при котором место коррекции находится под устраняющей позицией., фазы сигналов на входе регистратора 3 фазы совпадают, что достигается установкой соответствующей фазы дис- . баланса регулируемым фазовращателем, входящим в состав фильтра 5 нижних частот,, при наладке станка, и он формирует команду на останов вращения ротора (или выдает визуальную инфор- мацик) о ,
Балансировка роторов с использованием предлагаемого устройства осуществляется в следующей последоваft
тельности. Включают измерительное вращение, через интервал времени, достаточньй для установления переходных процессов в схеме 6 фильтрации сигнала дисбаланса, ее переключают в режим хранения информации, а вращение вьжлючают. По команде блока 10 управления осуществляют подготовку сигналов дополнительных осей коррекции. После этого регистратор 7 значения дисбаланса используется для
5 оценки необходимости коррекции дисбаланса и определения требуемого числа мест коррекции (корректировка только по центральной оси .коррекции или по дополнительным осям, или по тем и
0 другим).
Затем коммутатором 18 поочередно выбираются сигналы соответствуюпщх осей коррекции и, пользуясь выходной информацией регистратора 3 фазы, осуществляют прозиционирование балансируемого ротора местами коррекции под устраняющую позицию.
Регулировку угла ot осуществляют изменением длительности импульсов,
формируемых одновибратором 11.
Таким образом, использование предлагаемого устройства создает условия автоматизации процесса позиционирования балансируемого ротора по центральной и дополнительным осям коррек-
ф о р м у л а
ции и обеспечивает повышение точности и производительности этого процесса.
изобретения
ф о р м у л а
Измерительное устройство к балансировочному станку, содержащее вибродатчик, последовательно соединенные датчик фазы и регистратор фазы, генератор несущей частоты, фильтр нижних частот, соединенные с его выходом формирователь и регистратор значения дисбаланса и схему фильтрации сигнала дисбаланса, первьш вход которой соединен с выходом вибродатчика,второй - с выходом датчика фазы, трети й - с первым выходом генератора несущей частоты и первым входом датчика фазы8
четвертый - с вторым выходом генератора несущей частоты и вторым входом датчика фазы, а выход - с входом фильтра нижних частот, отличающееся тем, что, с целью повытения производительности за счет создания условий автоматизации позиционирования по дополнительным осям коррекции, оно снабжено соединенной с выходом формирователя укорачивающей цепочкой, блоком управления, одновиб- ратором, синхронным одновибратором, первым и вторым логическими элементами 2И-НЕ, первые входы которых соединены соответственно с прямым и инвер- сным выходами однрвибратора, а вторые - с выходом синхронного одновиб- ратора, первым и вторым счетчиками, С-входы которых соединены с третьим
выходом генератора несущей частоты, а СЕ-входы - с выходами соответствующих логических элементов 2И-НЕ, коммутатором, входы которого соединены с выходами обоих счетчиков и формирователя, а выход - с вторым входом регистратора фазы, и логическим элементом 2И, первый вход которого соединен с выходом укорачиваннцей цепочки, ST-входом одновибратора и С-входом синхронного одновибратора, второй - с ST-входом последнего и выходом блока управления, а выход - с R-входами обоих счетчиков.
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1420418A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1320670A1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1490518A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1270595A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
| Измерительное устройство к балансировочному станку | 1990 |
|
SU1746232A1 |
| Измерительное устройство к балансировочному станку | 1989 |
|
SU1649328A1 |
| Измерительное устройство к балансировочному станку | 1986 |
|
SU1320673A1 |
| Устройство для коррекции дисбаланса | 1985 |
|
SU1305543A1 |
Изобретение относится к балансировочной технике. Цель изобретенияповышение производительности за счет создания условий автоматизации позиционирования по дополнительным осям коррекции. Сигнал дисбаланса с выхода вибродатчика 1 фильтруется с помощью схемы 6 фильтрации сигнала дисбаланса и переносится по спектру с помощью генератора 4 несущей частоты. Регистратор 7 значения дисбаланса осуществляет оценку необходимости и требуемых мест коррекции. По команде блока 10 управления подготавливаются сигналы, соответствукяцие дополнительным осям коррекции, и регистратор 3 фазы, подключенный к выходу коммутатора 18, поочередно выбирающего сигналы соответствующих осей коррекции, отображает информацию, которая позволяет проводить позиционирование.3 ил.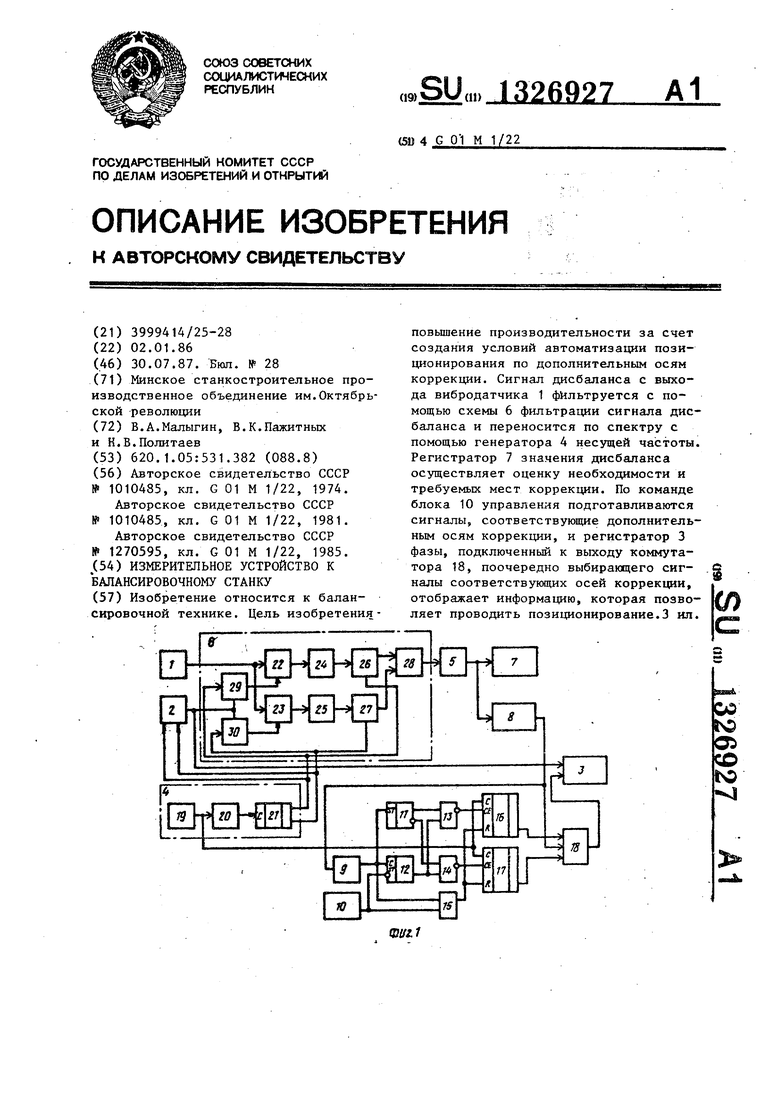
Фиг. 2
A
гп-л.
Физ.З
Составитель Ю.Круглов Редактор A.Ренин Техред Л.ОлийныкКорректор л.Пилипенко
W -. ---- .-.-- «, ... « -.
Заказ 3273/37 Тираж 776Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
.Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
A
Л
-ft)f .a)t ft)
-cut -Wt
-(лЬ .(tit -eat .a)t
ait
| Измерительное устройство к балансировочному станку | 1981 |
|
SU1010485A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Измерительное устройство к балансировочному станку | 1981 |
|
SU1010485A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1270595A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
