Известные устройства для дистанционного регулирования скорости прессования, осуществляемого гидропрессами, при быстрых изменениях хода пресса недостаточно устойчивы в работе.
В предлагаемом устройстве для дистанционного регулирования скорости прессования, с целью повышения устойчивости работы, якорь стабилизирующего тахогенератора подключен через добавочное сопротивление к источнику постоянного тока и применен дифференцирующий трансформатор, через обмотки возбуждения которого снимают стабилизирующий сигнал и подают на вход полупроводникового усилителя, причем в качестве датчика положения в изодромном регуляторе применен бесконтактный сельсин, а в качестве упругой обратной связи-.вращающийся в поле электромагнита алюминиевый диск.
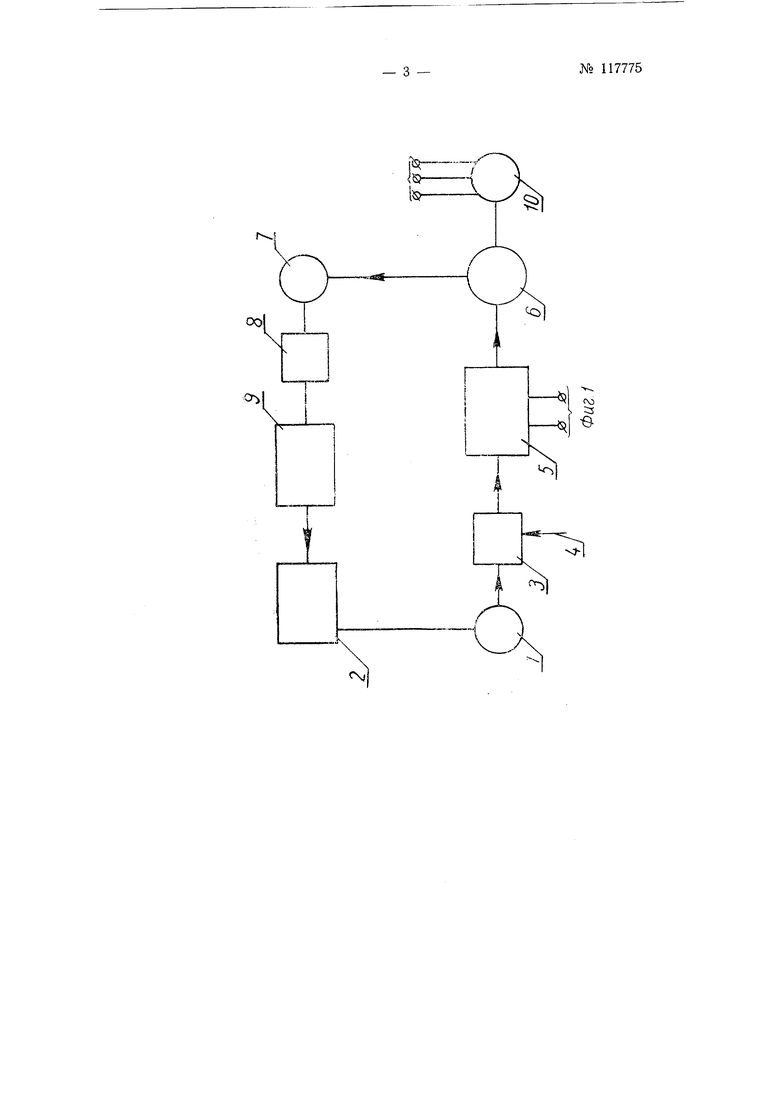
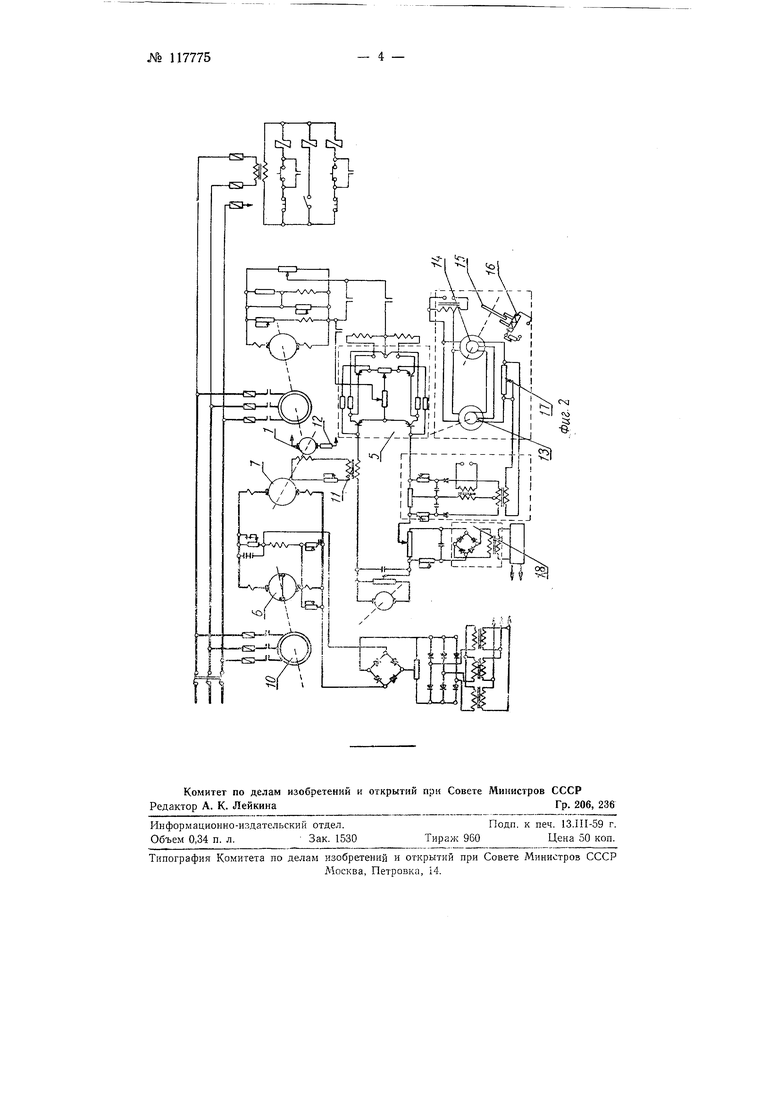
На фиг. 1 показана блок-схема; на фиг. 2-принципиальная электросхема устройства.
Описываемое устройство предназначено для дистанционного регулирования скорости прессования, осуществляемого гидропрессами с приводом от насосно-аккумуляторной станции, и построено на принципе астатического регулирования, согласно которому скорость прессования задается посредством эталонного напряжения путем соответствующей установки его для сравнения сигнала от тахогенератора с заданным эталонным напряжением.
По блок-схеме тахогенератор / механически связан с прессующей траверсой пресса 2. и является датчиком скорости прессования, подающим на узел 5 сигнал для сравнения его с заданным эталонным напряжением 4, поступающим в этот узел и являющимся пропорциональным заданной скорости прессования.
Если скорость прессования изменилась, напряжение тахогенератора 1 будет отличаться от заданного эталонного напряжения. Возникшая
№ 117775
разность между напряжениями будет поступать на вход промежуточного полупроводникового усилителя 5, в результате чего усиленный сигпал от последнего поступит на обмотки электромашинного усилите тя 6, который, возбуждая1 ь, подает напряжение на якорь исполнительного двигателя 7. Исполнительный двигатель, вращаясь, переместит посредством редуктора 8 иглу гидравлического дросселя 5 так, что поток воды, протекающий от гидроаккумулятора через дроссель, изменит скорость прессования и приведет к уменьщению разности напряжений тахогенератора и эталонного.
Электромашинкый усилитель получает привод от асинхронного двигателя 10.
Гибкая обратная связь изодромного регулятора осуществляется посредством тахогенератора / (фиг. 2), механически соединенного с двигателем 7, и дифференцирующего трансформатора //, через обмотки возбуждения которого снимают стабилизирующий сигнал от тахогенератора и подают на вход полупроводникового усилителя 5. Якорь тахогенератора / подключен через добавочное сопротивление 12 к источнику постоянного тока.
Бесконтактный сельсин-датчик 13 механически соединен с исполнительным двигателем 7, являющимся приводом гидравлического дросселя. На валу сельсина-приемника 14 закреплен алюминиевый диск 15, вращающийся в поле электромагнита 16. Вихревые токи, возникающие при вращении в диске, создают торможение ротора сельсина приемника. От возникшего рассогласования сельсинов датчика и приемника в соединяющей обмотке их статоров цепи начнет течь ток. Разность потенциалов от падения напряжения в сопротивлении 17 будет подана в фазочувствительный выпрямитель 18, на выходе которого возникнет напряжение, направленное навстречу разности напряжений. Когда эти напряжения сравняются, на входе усилителя 5 сигнал будет равен нулю, что вызовет останов двигателя.
Предмет изобретения
1.Устройство для дистанционного регулирования скорости прессования, осуществляемого гидропрессами, с приводом от насосно-аккумуляторной станции, построенное на принципе астатического регулирования с применением полупроводниковых усилителей, стабилизирующего тахогенератора и изодромного регулятора с гибкой обратной связью, отличающееся тем, что, с целью достижения повыщения устойчивости работы при одновременном упрощении устройства, якорь стабилизирующего тахогенератора подключен через добавочное сопротивление к источнику постоянного тока и применен дифференцирующий трансформатор, через обмотки возбуждения которого снимают стабилизирующий сигнал и подают на вход полупроводникового усилителя.
2.Форма выполнения устройства по п. 1, отличающаяся тем, что в изодромном регуляторе применен в качестве датчика положения бесконтактный сельсин, а в качестве элемента упругой обратной связи- вращающийся в поле электромагнита алюминиевый диск.
| название | год | авторы | номер документа |
|---|---|---|---|
| Силовой следящий электропривод для управления угловым положением объекта | 1962 |
|
SU152011A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РЕГУЛЯТОР СКОРОСТИ ГИДРОТУРБИНЫ | 1969 |
|
SU258164A1 |
| Устройство для измерения скорости быстроходных прессов | 1960 |
|
SU132869A1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ МАШИНЫ ПОСТОЯННОГО ТОКА | 2005 |
|
RU2281525C1 |
| ОРГРЭС Государственного производственного комитета по энергетике и электрификации СССР | 1966 |
|
SU184744A1 |
| Электропривод гребной установки | 1979 |
|
SU855913A2 |
| Устройство для синхронизации нажимных винтов клети прокатного стана | 1968 |
|
SU600679A1 |
| СТЕНД С БЕГОВЫМИ БАРАБАНАМИ ДЛЯ ИСПЫТАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1971 |
|
SU312170A1 |
| Устройство управления электроприводом | 1983 |
|
SU1161920A1 |
| Устройство управления электроприводом | 1985 |
|
SU1305640A2 |