Известны электрогидравлические регуляторы скорости и активной мощности гидроагрегатов ГЭС, содержащие электрический и гидромеханический узлы с преобразователем для их связи и полупроводниковые усилители и 1модуляторы, включенные в цепи изодромной обратной связи и группового регулирования. Указанные регуляторы имеют малую выходную мощность усилителей, что вызывает возникновение зоны нечувствительности в исполнительной части регулятора.
Усилители постоянного тока усложняют электрическую схему за счет введения различных стабилизирующих цепей, связанных с исключением «дрейфа нуля.
Во время работы агрегатов происходит изменение параметров изодрома, что вызывает толчки в системе регулирования.
Выявители отклонения частоты с индуктивными катушками имеют ограниченные пределы линейности и запаздывания.
Контактные проволочные потенциометры в цепях обратных связей и механизма изменения скорости, имеют ограниченный срок службы и малонадежны.
Предлагаемый регулятор отличается от известных тем, что вместо электронного или магнитного усилителя постоянного тока, включенного в прямую цепь, применены транзисторные усилители переменного тока как в
прямой цепи, так и в цепи изодромной обратной связи. Такие усилители обладают немедленной готовностью к работе и имеют высокую стабильность нуля.
В прямую цепь усиления включен транзисторный фазочувствительный усилитель, являющийся усилителем мощности, который позволяет значительно увеличить выходную мощность выявителя, и уменьшить зону нечув0ствительности регулятора.
В цепь питания изодромной обратной связи последовательно включены конденсаторы для их предварительного подзаряда с целью исключения толчков в системе регулирования при изменении параметров изодрома.
Перечисленные отличительные особенности обеспечивают предлагаемому регулятору меньщую зону нечувствительности, повышенную надежность и высокую стабильность характе0ристик.
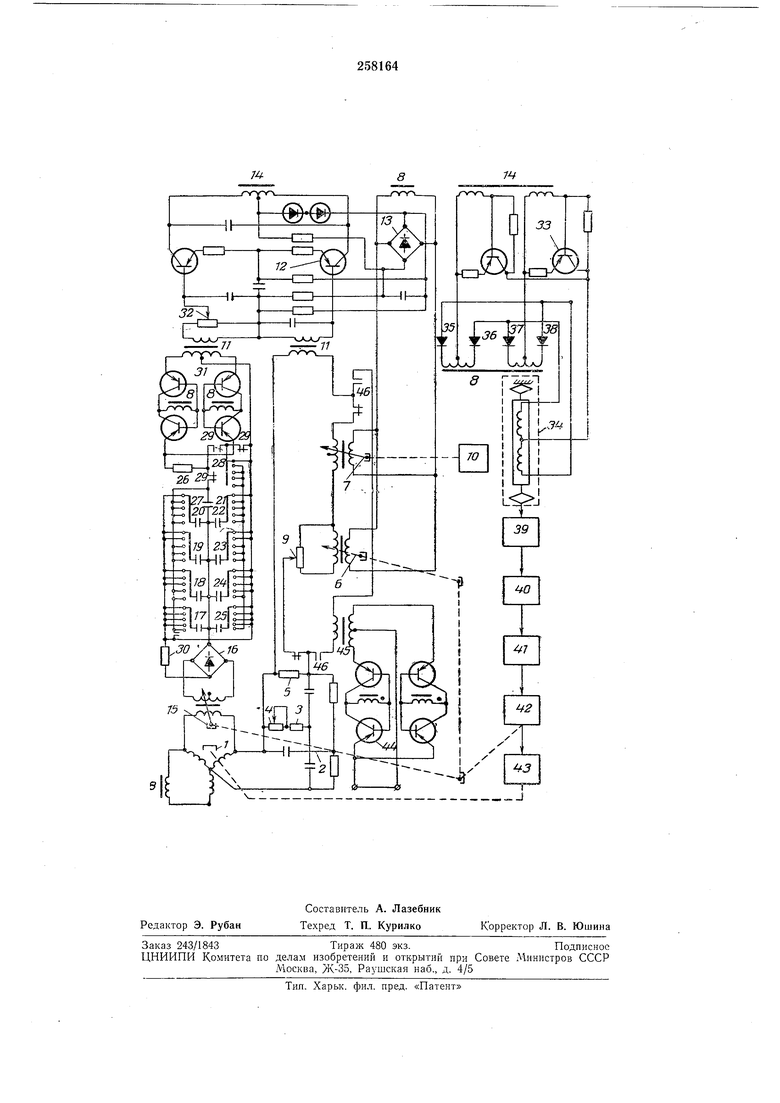
На чертеже представлена схема предлагаемого регулятора.
Питание регулятора осуществляется от тахогенератора /, жестко связанного с валом гидроагрегата. Выявитель отклонения частоты представляет собой двойной Т-образный мост 2, 3 низких частот, являющийся заградительным фильтром токов. Он задерживает токи резонансной частоты (50 гц и пропускает токи других частот.
С помощью потенциометра 4 производится настройка моста в диапазоне частот 49-51 гц.
Отсутствие в схеме выявителя отклонения частоты индуктивных катушек расширяет пределы линейности его характеристик и исключает запаздывание.
Сопротивление 5 нагрузки включено последовательно в цепь датчика 6 жесткой обратной связи и датчика 7 механизма изменения скорости. Питание датчиков производится от трансформатора 8. Датчики 6 w. 7 представляют собой бесконтактные .индукциодные датчики (сельсины), работающие в трансформаторном режиме. Они более надежны по сравнению с проволочными, потенциометрами и непосредственно позволяют произвести суммирование, сигналов на переменном токе. Ротор датчика 6 жесткой обратной связи механически связан с серводмотором направляющего аппарата. Глубина обратной связи (статизм) устанавливается потенциометром 9 в пределах от О до 10%. С помощью датчика 7 механизма изменения скорости задается скорость вращения на холостом ходу, осуществляется синхронизация гидроа лрегата с энергосистемой и производится набор нагрузки. Управление ротором датчика 7 осуществляется электродвигателем 10 или маховичком от руки.
Суммарный сигнал от выявителя частоты, датчиков жесткой обратной связи и механизма изменения скорости, включенных последовательно, подается на первичную обмотку трансформатора //. Вторичная обмотка трансформатора соединена с входом транзисторного усилителя 12 переменного то1ка, питаемого от трансформатора 8 через выпрямительный мост 13. Транзисторный усилитель 12 является безынерционным усилителем напряжения переменного тока с высоким коэффициентом усиления. Выходное напряжение усилителя поступает в первичную обмотку суммирующего трансформатора 14, где оно суммируется с напряжением от изодромной обратной связи.
Такая схема прямой цепи усиления напряжения позволяет достигнуть улучшения стабильности характеристик, так как в усилителях переменного тока «дрейф нуля практически отсутствует, а также позволяет осуществить суммирование малых сигналов с упрощением схемы.
В предлагаемом регуляторе цепь изодромной обратной связи имеет самостоятельное питание от тахогенератора / и собственный транзисторный усилитель переменного тока. Датчик 15 изодромной обратной связи, ротор которого жестко связан с сервомотором направляющего аппарата, питается от тахогенератора 1. Напряжение от этого датчика через выпрямительный мост 16 подается в цепь изодромного устройства, представляющего собой параллельное соединение конденсаторов 17-25 и последовательно включенного сопротивления 26. Конденсаторы 17-21 предназначены для изменения постоянной времени
изодрома при работе гидроагрегата на холостом ходу, а конденсатора 22-25 - при работе под нагрузкой.
Из1менение времени изодрома осуществляется переключателями 27 и 28, а изменение режима работы - контактами реле 29. Особенность данной схемы изодромной обратной связи заключается в том, что изменение постоянной времени осуществляется конденсаторами, которые через сопротивление 30 предварительно заряжены напряжением, соответствующим данному положению сервомотора направляющего аппарата, что исключает толчки в системе регулирования при изменении
времени изодрома на работающем гидроагрегате.
Напряжение цепи RC подается на транзисторный двухполупериодный модулятор 31, работающий в ключевом режиме. Модулятор
преобразует напряжение постоянного тока и напряжение переменного тока. Питание модулятора осуществляется от трансформатора 8. Напряжение от модулятора поступает на первичную обмотку трансформатора 11 и через
потенциометр 32 подается на вход транзисторного усилителя переменного тока. С выхода усилителя напряжение подается на первичную обмотку суммирующего трансформатора 14. где оно суммируется с напряжением прямой
цепи усиления Первичные обмотки этого трансфор-матора соединены последовательно. Глубина изодромной обратной связи регулируется потенциометром 32.
Раздельные цепи изодромной обратной
связи и прямой цепи усиления с параллельным включением самостоятельных транзисторных усилителей переменного тока и с суммированием сигналов на выходе усилителей позволяют повысить стабильность характеристики
выявительных элементов, упростить схему и повысить надежность ее работы.
От трансформатора 14 суммарный сигнал поступает на транзисторный фазочувствительный усилитель 33, который усиливает и преобразует сигнал рассогласования переменного тока в сигнал постояпного тока, необходимый для управления дифференциальной нагрузкой - катущкой 34 электромеханического преобразователя.
Питание фазочувствительного усилителя осуществляется от трансформатора 8 через выпрямители (диоды) 35-38. Фазочувствительный усилитель собран по двухполупериодной схеме и представляет собой усилитель
мощности с выходом на дифференциальную нагрузку (катущка 54).
Такая схема позволяет значительно увеличить выходную мощность усилителя и уменьшить зону нечувствительности исполнительной части регулятора, а также уменьшить «дрейф нуля усилителя, так как при отсутствии напряжения на входе фазочувствительного усилителя 33 за два полупериода питающего напряжения суммарный ток, протекаюший в катушке 34, не зависит от параметров транзисторов усилителя, а зависит лишь от разности обратных токов групп диодов 35-36 и 37-38. У кремниевых диодов, которые применены в схеме, разность обратных токов не превышает 0,5%.
Катушка 34 электромеханического преобразователя управляет гидромеханической частью регулятора, состояшей из гидроусилителя 39, побудительного золотника 40, главного золотника 41, сервомотора 42 направляющего аппарата, с которым жестко связаны датчики 6 и 15. Сервомотор управляет открытием направляюш,его аппарата и мощностью гидроагрегата 43.
Для введения в регулятор управляющих воздействия на постоянном токе предусмотрены цепи группового регулирования, состояшие из транзисторного модулятора 44, одинакового с модулятором 31, трансформатора 45 и контактов реле 46, осуществляющих переключение режимов работы.
Предмет изобретения
1. Электрогидравлический регулятор скорости гидротурбины с электромеханическими
элементами изменения частоты и мощности гидроагрегата и изодромной обратной связью, содержащий электрический и гидромеханический узлы с преобразователем для их связи и полупроводниковые усилители и модуляторы, включенные в цепи изодромной обратной связи и группового регулирования, отличающийся тем, что, с целью уменьшения зоны нечувствительности и повышения динамических
качеств регулятора и надежности, в прямую цепь усиления включены транзисторные усилители переменного тока, к выходным цепям которых подключен суммирующий трансформатор, соединенный через фазочувствительный
усилитель мощности с дифференциальной выходной нагрузкоГк
2.Регулятор по п. 1 отличающийся тем, что, с целью повыщения плавности регулирования при изменении параметров обратной
связи, в цепь ее питания последовательно включены конденсаторы для предварительного подзаряда.
3.Регулятор по п. 1, отличающийся тем, что, с целью повышения надежности, выходные цепи модулятора группового регулирования через контакты реле соединены последовательно с прямой цепью усиления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РЕГУЛЯТОР СКОРОСТИ | 1969 |
|
SU257367A1 |
| ЭЛЕКТРОННЫЙ РЕГУЛЯТОР РЕЛЕЙНОГО ТИПА С ИЗОДРОМНОЙ ОБРАТНОЙ СВЯЗЬЮ | 1964 |
|
SU164632A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РЕГУЛЯТОР СКОРОСТИ | 1966 |
|
SU183138A1 |
| Автоматический регулятор дистанционного действия | 1955 |
|
SU122623A1 |
| ЭЛЕКТРОННЫЙ РЕГУЛЯТОР РЕЛЕЙНОГО ТИПА С ИЗОДРОМНОЙ ОБРАТНОЙ СВЯЗЬЮ | 1969 |
|
SU237227A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1971 |
|
SU298922A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| ОРГРЭС Государственного производственного комитета по энергетике и электрификации СССР | 1966 |
|
SU184744A1 |
| БЕСКОНТАКТНЫЙ АВТОРЕГУЛЯТОР ДЛЯ МЕЛИОРАТИВНЫХ СИСТЕМ | 1973 |
|
SU368586A1 |
| Электрический изодромный регулятор | 1951 |
|
SU99296A1 |