Изобретение относится к области испытания транспортных средств, в частности к стендам с беговыми барабанами, предназначенным для испытания автомобилей в условиях, близких к дорожным.
Известны стенды для испытания автомобилей с приводом беговых барабанов, содержащим нагрузочный генератор постоянного тока, обмотка возбуждения которого подключена к источнику стабилизированного напряжения, а в цепь якоря включены нагрузочное сопротивление и якорь электрической ман1ины постоянного тока, приводимой во вращение от вспомогательного двигателя, датчик тока, тахогенератор и регулятор момента сопротивления движению автомобиля, который имитирует момент пропорционально угловой скорости, ее производной и квадрату угловой скорости.
Такие приводы стендов позволяют имитировать силы сопротивления движению автомобиля, возникающие в реальных условиях как на установивщихся, так и на неустановившихся режимах движения по горизонтальной дороге, и предназначены для испытания автомобилей на динамичность и топливную экономичность. Однако они не позволяют воспроизводить условия движения автомобиля по дороге с заранее заданным программой переменным уклоном.
Предлагаемый стенд отличается от известных тем, что аналоговое управляющее устройство содержит усилители, собранные по схеме «модуляция-демодуляция, причем канал постоянной составляющей выполнен на знакочувствнтельном усилителе-ограничителе, соединенном на входе с тахогенератором, а на вход аналогового управляющего устройства подключено программное устройство, задающее уклон дороги, в механизме перемещения программоносителя которого установлен сельсинприемник, электрически связанный с сельсиндатчиком, смонтированным на валу беговых барабанов.
При таком выполнении стенда повышается точность воспроизведения дорожных условии при движении транспортного средства по дороге с переменным уклоном.
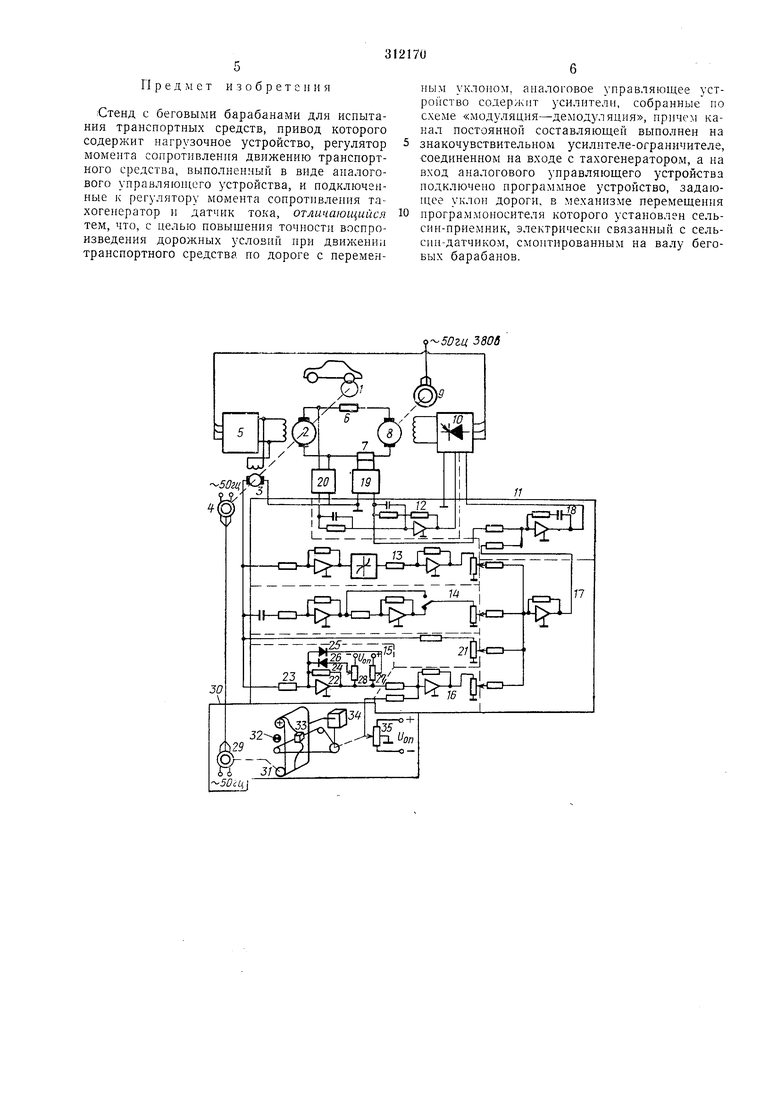
На чертеже изображена электрическая схема привода стенда.
Беговые барабаны / механически связаны с нагрузочным генератором 2 постоянного тока, тахогенератором 3 и сельспн-датчнком 4. Обмотка возбуждения нагрузочного генератора подключена к источнику 5 стабилизированного напряжения, а цепь якоря через нагрузочное сопротивление 6 и щит 7 соединена с цепью якоря другой электрической машины 8 постоянного тока, которая механически связана с вспомогательным электродвигателем ,9
и электрически - с тиристорным преобразователем 10.
Цепи управления тиристорного преобразователя подключены к выходу регулятора момента сопротивления движению автомобиля, которы-й представляет собой апалоговое управляющее устройство //. Опо содержит узел 12 компенсации э.д.с. врапдения генератора 2 постоянного тока, механически связанного с беговыми барабанами, канал 13 имитации сопротивления воздуха, канал 14 имитации массы, канал 15 постоянной составляющей, канал 16 имитации массы автомобиля, сумматор 17 и регулятор 18. Вход узла компенсации э.д.с. вращения через датчик 19 тока и датчик 20 напряжения связан с якорной цепью генератора и мащины постоянного тока, а выход подключен к цепям управления тиристорного преобразователя 10.
Входы каналов имитации сопротивления воздуха, массы автомобиля и потенциометра 21 пропорциональной составляющей подключены к тахогенератору, а их выходы через сумматор - к регулятору, электрически соединенному с цепями управления тиристорного преобразователя 10.
Вход усилителя-ограничителя 22 канала постоянной составляющей через резистор 23 связан с тахогеператором. В цепи обратной связи усилителя установлены резистор 24, сопротивление которого значительно больще сопротивления входного резистора, и диоды 25, 26, соединенные с движками иотенциометров 27, 28, подключенных к опорному напряжению. Выход усилителя-ограничителя 22 подключен на суммирующий вход канала 16.
Сельсин-приемник 29 программного устройства 30, задающего уклон дороги, электрически связан с сельсин-датчиком и механически- с устройством 31 для перемещения программоносителя. С одной стороны с программоносителя установлен осветитель 32, а с другой-фотосопротивлеиие 33, электрически связанное со входом и механически с выходным валом следящей системы 34 и двинском потенциометра 35, который электрически соединен с суммирующим входом канала 16.
Стенд работает следующим образом.
Автомобиль, установленный на беговых барабанах /, вращает вместе с ними пагрузочный генератор 2 постоянного тока, тахогенератор 3 и сельсин-датчик 4. Сельсин-приемник 29 программного устройства 30, задающего уклон дороги, перемещает программоноситель со скоростью, пропорциональной угловой скорости беговых барабанов 1. За изменением прогр,аммы следит фотосопротивление 33 с помощью следящей системы 34. Выходной сигнал, пропорциональный тангенсу угла наклона дороги, снимается с движка потенциометpa 35 и подается на вход канала 16. Сигнал с тахогенератора 3, пропорциональный скорости вращения беговых барабанов 1, поступает ,на вход каналов 13, 14 и потенциометра 21 пропорциональной составляющей и через
резистор 23-на вход усилителя-ограничителя 22 капала 15.
Когда беговые барабаны неподвижны, напряжение на выходе усилителя-ограничителя 22 равно нулю. При малых напряжениях тахогенератора диоды 25, 26 заперты и коэффициент усиления усилителя-ограничителя 22 определяется только отношением сопротивлений резисторов 24, 23. Когда напряжение иа выходе усилителя-ограничителя 22 достигает значения, заранее заданного на потенциометре 28, наример при скорости беговых барабанов 1 км/час, диод 26 отпирается и коэффициепт усиления резко падает. При дальнейшем увеличении напряжения тахогенератора 3 напряженке на выходе усилителя-ограничителя 22 не изменяется.
При изменении направления вращения беговых барабанов изменяется полярность сигнала тахогенератора 3, соответственно меняется полярность на выходе усилителя-ограничителя. Теперь напряжение на его выходе сравнивается с заранее заданным напряжением на потенциометре 27. В случае их равенства, отпирается диод 25, и дальнейший рост напрял ения на выходе усилителя-ограничителя прекращается.
В канале 16 происходит сигналов с усилителя-ограничителя 22 и движка потенциометра 35 и умножение их суммы на коэффициент, пропорциональный массе автомобиля. В канале 13 имитации сопротивления воздуха сигнал с тахогенератора проходит через квадратичпый преобразователь и умножается иа коэффициент, пропорциональный фактору обтекаемости автомобиля. В канале 14 имитации массы сигнал с тахогенератора 3 дифференцируется и умпо кается на коэффициент, пропорциональный разности между эквивалентной массой стенда и массой автомобиля. Пропорциоиальная составляющая снимается с потенциометра 21. Сигналы с каналов 13, 14, 16 и потенциометра 21 поступают через сумматор 17 на вход регулятора 18. На другой вход этого регулятора поступает сигнал с датчика 19 тока.
В соответствии с разностью сигналов сумматора и датчика тока регулятор вырабатывает напряжение, которое поступает на вход тиристориого преобразователя 10. На другой вход преобразователя поступает сигнал с узла 12 компеисации э.д.с. вращения, который вырабатывает напряжение, пропорциональное э.д.с. генератора 2 постоянного тока.Тиристорный преобразователь 10 возбуждает электрическую мащииу 8 так, что нагрузочный геператор 2 создает на валу беговых барабанов / необходимый момент сопротивления движению, зависящий от уклона дороги, угловой скорости беговых барабанов, ее производной во времени и квадрата угловой скорости, а также составляющую момента, зависящую от иаправлеиия вращения беговых барабанов.
Предмет и з о б р е т
и и я
Стенд с беговыми барабанами для испытания транспортных средств, привод которого содержит нагрузочное устройство, регулятор момента сопротивлення движению транспортного средства, выполненный в виде аналогового управляюнюго устройства, и подключенные к регулятору момента сопротивления тахогенератор и датчик тока, отличающийся тем, что, с целью повышения точности воспроизведения дорожных условий при движении транспортного средства по дороге с переменным уклоном, аналоговое управляющее устройство содержит усилители, собранные по схеме «модуляция-демодуляция, причем канал постоянной составляющей выполнен на знакочувствительном усилителе-ограничителе, соединенном на входе с тахогенератором, а на вход аналогового управляющего устройства подключено программное устройство, задающее уклон дороги, в механизме перемещения программоносителя которого установлен сельсин-ириемник, электрически связанный с сельсин-датчиком, смонтированным на валу беговых барабанов.

| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания транспортных средств | 1980 |
|
SU1012072A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ АВТОМОБИЛЕЙ | 1964 |
|
SU164994A1 |
| Стенд для испытания трансмиссии автомобиля | 1972 |
|
SU484433A1 |
| СТЕНД ДЛЯ УСКОРЕННЫХ ИСПЫТАНИЙ | 1972 |
|
SU330372A1 |
| Стенд для испытания колесных транспортных средств | 1990 |
|
SU1712813A1 |
| Устройство для управления электроприводом кристаллизатора установки непрерывной разливки металла | 1971 |
|
SU442885A1 |
| Стенд для динамических испытаний колесных тракторов | 1988 |
|
SU1605151A1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ МАШИНЫ ПОСТОЯННОГО ТОКА | 2005 |
|
RU2281525C1 |
| Стенд для испытания одноколейных транспортных средств | 1989 |
|
SU1672264A1 |
| СПОСОБ ПРОВЕРКИ ИСПРАВНОСТИj | 1965 |
|
SU168470A1 |
