Изобретение относится к измерительной технике и может быть использовано в контрольно-измерительной аппаратуре, в испытательных стендах и установках, а также в гироскопических устройствах, работающих с электронными вычислительными машинами.
Цель изобретения - повышение точности измерений.
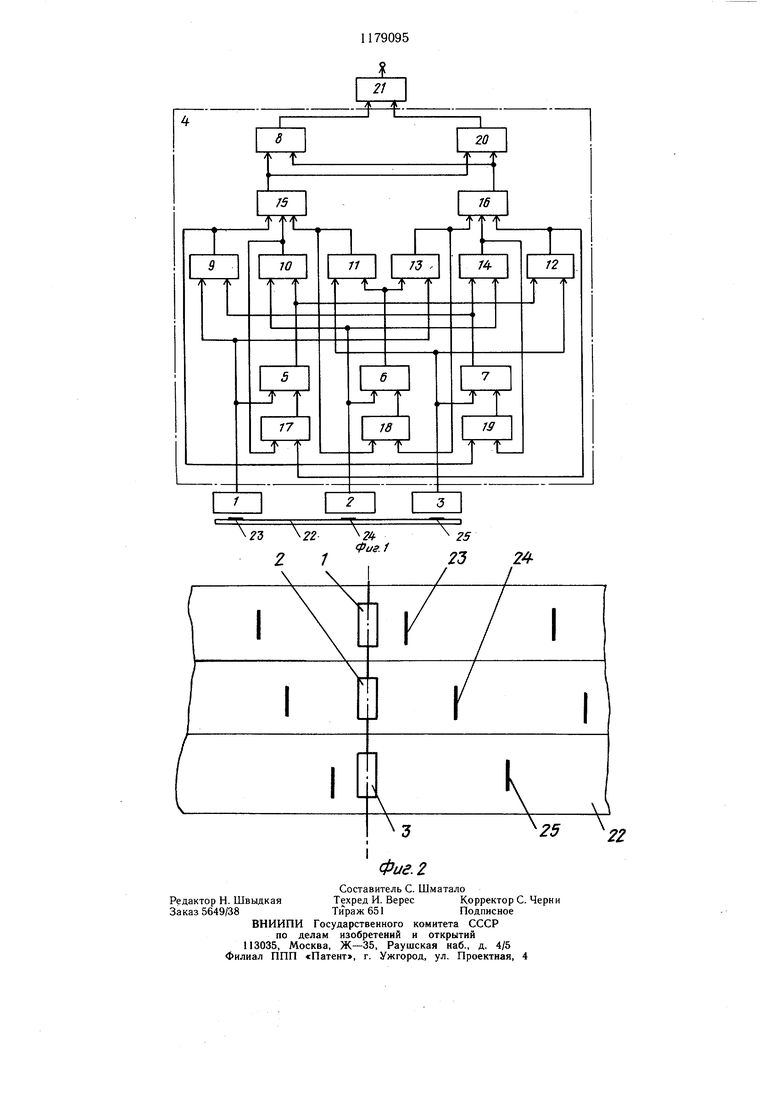
На фиг. 1 приведена функциональная схема устройства для измерения линейных и угловых перемеш,ений; на фиг. 2 - расположение трех последовательностей меток, нанесенных на объекте, и считываюш,их датчиков.
Устройство для измерения линейных и угловых перемещений содержит датчики 1, 2 и 3, блок 4 анализа последовательности сигналов, включающий триггеры 5-8, элементы И 9-14, элементы ИЛИ 15-20, а также реверсивный счетчик 21 (фиг. 1).
На объекте 22 расположены три последовательности меток 23, 24, 25, сопряженных с датчиками 1, 2, 3 и выполненных со смещением друг относительно друга на 1-3 единицы дискрета перемещения (фиг. 2).
Датчики 1, 2 и 3 расположены в одной плоскости, перпендикулярной к оси перемещения объекта 22. Вход первого триггера 5 соединен с первым датчиком 1, вход второго триггера 6 - с вторым датчиком 2, входы первого 9, второго 10 и третьего 11 элементов И соединены с соответствующими датчиками 1, 2 и 3, четвертый элемент И 12 соединен входом с выходом первого триггера 5, первый элемент ИЛИ 15 соединен входами с выходами элементов И 9, 10 и 11, второй вход второго элемента И 12 соединен с выходом первого триггера 5, второй вход четвертого элемента И 12 - с третьим датчиком 3, а выход - с первыми входами второго 16 и третьего 17 элементов ИЛИ, первый вход пятого элемента И 13 соединен с первым датчиком 1, второй вход - с вторым входом третьего элемента И И и с выходом второго триггера 6, а выход - с вторым входом второго элемента ИЛИ 16 и первым входом четвертого элемента ИЛИ 18, первый вход шестого элемента И 14 соединен с вторым датчиком 2, второй вход - с вторым входом первого элемента И 9 и с выходом третьего триггера 7, а выход - с третьим входом второго элемента ИЛИ 16 и с первым входом пятого элемента ИЛИ 19, второй вход третьего элемента ИЛИ 17 соединен с выходом второго элемента И 10, второй вход четвертого элемента ИЛИ 18 соединен с выходом третьего элемента И 11, второй вход пятого элемента ИЛИ 19 соединен с выходом первого элемента И 9, выход второго элемента ИЛИ 16 соединен с первыми входами шестого элемента ИЛИ 20 и четвертого триггера 8, первый вход третьего триггера 7 соединен с третьим датчиком 3, вторые входы первого 5, второго 6 и
третьего 7 триггеров соединены с выходами третьего 17, четвертого 18 и пятого 19 элементов ИЛИ соответственно, вторые входы четвертого триггера 8 и шестого элемента ИЛИ 20 соединены с выходом первого элемента ИЛИ 15, а выходы - с входами реверсивного счетчика 21.
Устройство для измерения линейных и угловых перемещений работает следующим образом.
При перемещении объекта 22 в одном или другом направлении датчики 1, 2, 3 считывают метки 23, 24, 25. Сигналы с датчиков 1, 2, 3 поступают в блок 4 анализа последовательности сигналов в порядке, обусловленном положением меток 23, 24, 25 на объекте 22 и положением датчиков 1, 2, 3 относительно меток 23, 24, 25.
Реверсивный счетчик 21 осуществляет алгебраический подсчет числа считанных меток. При движении объекта 22 в одном
0 направлении сигналы в реверсивном счетчике 21 алгебраически суммируются, при движении объекта 22 в обратном направлении - вычитаются. В любой момент времени реверсивный счетчик 21 содержит число считанных меток, являющееся цифровым эквивалентом перемещения объекта 22 относительно начальной точки отсчета.
Направление движения объекта 22 определяется в блоке 4 анализа последовательности сигналов путем анализа последовательности сигналов, выдаваемых датчиками 1, 2, 3. При этом необходимо и достаточно определить порядок следования двух сигналов, последовательно поступающих в блок 4 анализа последовательности сигналов с датчиков 1, 2 или 3. Так, например, если сигналы
поступают вначале с первого датчика 1, затем - с второго датчика 2, то объект 22 перемещается в одном направлении. Если сигналы поступают в обратной последователь ности, т. е. вначале с второго датчика 2, затем - с первого 1, то объект 22 перемеща0 ется в противоположном направлении.
Если обозначить через Xi сигнал, поступающий с первого датчика 1, через Х2 - сигнал с второго датчика, 2, а через Хз - сигнал с третьего датчика 3, то логические функции
F, X,XjVX,XjVX3X, F, X,X,,VX,X,VX.X,
описывают все возможные варианты следования сигналов при перемещении объекта
22 в прямом FI и противоположном р2 направлении.
Рассмотрим прохождение двух сигналов, например X2X|, в устройстве для измерения линейных и угловых перемещений. Сигнал Хд, пришедший первым с второго датчика 2, поступает на первый вход второго триггера 6 и устанавливает на его выходе единичный сигнал, который открывает третий 11 и пятый 13 элементы И, поступая
на их вторые входы. Сигнал X|, пришедший затем с первого датчика 1 на первые входы первого 9 и пятого 13 элементов И, проходит через открытый пятый элемент И 13 и далее через второй 16 и шестой 20 элементы ИЛИ на второй (счетный) вход реверсивного счетчика 21. Сигнал, поступающий с выхода второго элемента ИЛИ 16 на первый вход четвертого триггера 8, устанавливает на его выходе нулевой сигнал, который поступает на первый (управляющий) вход реверсивного счетчика 21. При этом реверсивный счетчик 21 суммирует сигналы, поступающие на его второй (счетный) вход. Сигнал с выхода пятого элемента И 13 поступает также на первый вход четвертого элемента ИЛИ 18 и далее на второй вход второго триггера 6, устанавливая на его выходе нулевой сигнал. Сигнал с выхода первого датчика I поступает также на первый вход первого триггера 5 и устанавливает на его выходе единичный сигнал, который открывает второй 10 и четвертый 12 элементы И, подготовив, таким образом, устройство к приходу следующего сигнала.
Если объект не изменяет направления, то следующим приходит сигнал Хз, и устройством анализируется элемент XiXa функции р2. Если же объект изменяет направление, то вслед за сигналом Xi приходит сигнал Х2, и устройством анализируется элемент XiXs функции FI.
Пусть, например, объект изменил направление перемещения, и вслед за сигналом Xi с первого датчика 1 приходит сигнал Х2 с второго датчика 2, который, пройдя через открытые второй элемент И 10 и первый 15 и щестой 20 элементы ИЛИ, поступает на второй (счетный) вход реверсивного счетчика 21. Сигнал с выхода первого элемента ИЛИ 15 поступает также на второй вход четвертого триггера 8 и устанавливает на его выходе единичный сигнал, который поступает на первый (управляющий) вход реверсивного счетчика 21. При этом реверсивный счетчик 21 вычитает сигнал, поступивший на его второй (счетный) вход.
Сигнал с выхода второго элемента И 10 поступает через третий элемент ИЛИ 17 на второй вход первого триггера 5 и устанавливает на его выходе нулевой сигнал. Сигнал Х2 с выхода второго датчика 2 поступает на первый вход второго триггера 6 и устанавливает на его выходе единичный сигнал, который, поступая на вторые входы, открывает третий 11 и пятый 13 элементы И.
Если следующий сигнал поступает с третьего датчика 3, то пройдя через открытые третий элемент И 11 и первый 15 и шестой 20 элементы ИЛИ, сигнал вычитается из содержимого реверси.вного счетчика 21, так как с выхода четвертого триггера 8 поступает единичный сигнал на первый (управляющий) вход реверсивного счетчика 21. Сигналом с выхода третьего элемента И 11, проходящим через четвертый элемент ИЛИ 18 на второй вход второго триггера 6, устанавливается на выходе второго триггера 6 нулевой сигнал. Сигналом Хз на выходе третьего триггера 7 устанавливается единичный сигнал и т. д.
Таким образом, в блоке 4 анализа последовательности сигналов на выходе первого элемента ИЛИ 15 реализуется функция FI, а на выходе второго элемента ИЛИ 16 - функция р2. На выходе первого 9, второго 10 и третьего 1 1 элементов И реализуются элементы функции РЬ ХзХь XiX2 и Х2Хз соответственно, а на выходе четвертого 12, пятого 13 и шестого 14 элементов И - элементы функции р2: X2Xi; ХзХ2 и Х|Хз соответственно. Содержимое реверсивного счетчика 21 является цифровым эквивалентом перемещения объекта 22 относительно его начального положения.
Данное устройство позволяет определить величину и направление перемещения объекта, может быть изготовлено в микроминиатюрном исполнении по отработанной технологии, хорошо согласуется с ЭВМ и может найти применение при создании комплекса командных приборов системы управления летательных аппаратов и наземной контрольно-испытательной аппаратуры.
.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения линейных и угловых перемещений | 1987 |
|
SU1462091A1 |
| Устройство для определения границы области работоспособности технических объектов | 1984 |
|
SU1180847A1 |
| Устройство для подсчета объектов,расположенных беспорядочно | 1983 |
|
SU1129633A1 |
| Реверсивное счетное устройство | 1989 |
|
SU1709516A1 |
| Реверсивное счетное устройство | 1986 |
|
SU1396276A1 |
| Устройство оптимизации спуско-подъемных операций в бурении | 1987 |
|
SU1492030A1 |
| Телевизионное ориентирующее устройство | 1985 |
|
SU1298956A1 |
| Декодирующее устройство | 1989 |
|
SU1681388A1 |
| Устройство для раздельного управления реверсивным тиристорным преобразователем | 1987 |
|
SU1503055A1 |
| Устройство для селекции импульсов | 1983 |
|
SU1156104A1 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ И УГЛОВЫХ ПЕРЕМЕЩЕНИЙ, содержащее три датчика, два триггера, вход первого из которых соединен с первым датчиком, а вход второго - с вторым датчиком, три элемента И, вход каждого из которых соединен с соответствующим датчиком, четвертый элемент И, соединенный входом с выходом первого триггера, и элемент ИЛИ, входы которого соединены с выходами элементов И, отличающееся тем, что, с целью повышения точности измерений, дополнительно введены два триггера, два элемента И, пять элементов ИЛИ и реверсивный счетчик, при этом второй вход второго элемента И соединен с выходом первого триггера, второй вход четвертого элемента И соединен с третьим датчиком, а выход - с первыми входами второго и третьего элементов ИЛИ, первый вход пятого элемента И соединен с первым датчиком, второй вход - с вторым входом третьего элемента И и с выходом второго триггера, а выход - с вторым входом второго элемента ИЛИ и первым входом четвертого элемента ИЛИ, первый вход шестого элемента И соединен со вторым датчиком, второй вход - с вторым входом первого элемента И и с выходом третьего триггера, а выход - с третьим входом второго элемента ИЛИ и с первым входом пятого элемента ИЛИ, второй вход третьего элемента ИЛИ соединен с выходом второго элемента И, второй вход четвертого элеS мента ИЛИ соединен с выходом третьего элемента И, второй вход пятого элемента ИЛИ соединен с выходом первого элемента И, выход второго элемента ИЛИ соединен с первыми входами шестого элемента ИЛИ к четвертого триггера, первый вход третьего триггера соединен с третьим датчиком, вторые входы первого, второго и третьего триггеров соединены с выходами третьего, четвертого и пятого элементов ИЛИ соответст венно, вторые входы четвертого триггера и шестого элемента ИЛИ соединены с выходом О первого элемента ИЛИ, а выходы - с ел дами реверсивного счетчика.
23
24
/
/
| Гироскопические системы | |||
| Под ред | |||
| Пельпора Д | |||
| С | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| М.: Высшая школа, 1972, с | |||
| Способ передачи радиотелеграфных сигналов | 1922 |
|
SU394A1 |
| Методы определения направления движения в цифровых системах измерения перемещений | |||
| Экспресс-информация | |||
| Контрольноизмерительная техника | |||
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Там же, с | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
