фаг. г
налы поступают в обратной последовательности, то объект 35 перемещается в противоположном направлении. Логические функции F,,, и F Х,Х ,j.X , описывают все воз- молаЛле варианты следования сигналов датчиков при перемещении объекта 35 в каждом из направлений. На выходе первого элемента ИЛИ 26 реализуется : логическая функция F, на выходе вто- I роге элемента ИЛИ 27 - логическая 1 функция 7. Реверсивный счетчик 34 осуществляет алгебраическое суммирование сигналов, поступающих с выхода блока 4 анализа последовательности
сигналов и соответствующих элементам логических функций F и F. За начало отсчета перемещения принимается дискрет перемещения, которому соответствует положение объекта в момент начала измерений. Поэтому в случае, когда после первого последовательного срабатывания двух датчиков объект 35 будет находиться от начального положения на расстоянии, большем одного дискрета перемещения, в устройстве формируется дополнительный сигнал, который та:кже заносится в реверсивньй счетчик 34,что соответствует реальному положению объекта. 2 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1987 |
|
SU1474595A1 |
| Устройство управления электродвигателями | 1981 |
|
SU1081621A1 |
| Реверсивное счетное устройство | 1989 |
|
SU1709516A1 |
| Устройство для контроля средств числового программного управления | 1988 |
|
SU1675852A1 |
| Устройство для позиционного программного управления | 1982 |
|
SU1068895A1 |
| Устройство для управления положением исполнительных элементов | 1983 |
|
SU1226413A2 |
| Устройство генерации импульсов управления шаговым двигателем с электронной коррекцией | 1991 |
|
SU1829022A1 |
| Устройство для определения максимальной гармоники спектра Уолша | 1984 |
|
SU1211751A1 |
| Позиционный электропривод | 1981 |
|
SU962851A1 |
| Устройство для контроля электромагнита | 1986 |
|
SU1348776A1 |
Изобретение относится к измерительной технике. Целью изобретения является повьшение точности измерения. Это достигается путем учета дискрета перемещения, соответствующего положению объекта в момент начала измерений и по их окончанию. При перемещении объекта 35 датчики 1, 2 и 3 считывают последовательности меток, порядок считьшания которых определяется направлением перемещения. Если сигнал Х поступает сначала с первого датчика 1, затем с второго 2 (Xj) или сначала с второго 2 (Х,,), а потом с третьего 3 (Х) или сначала с третьего 3 (Х,), затем с первого 1 (X,), то объект 35 перемещается в одном направлении. Если сиг
1
Изобретение относится к измерительной технике и может быть использовано в контрольно-измерительной аппаратуре..
Цель изобретения - повьшение .точности измерения путем учета Дискрета перемещения, соответствующего положе-.. нию объекта в момент начала измерений и по их окончанию.
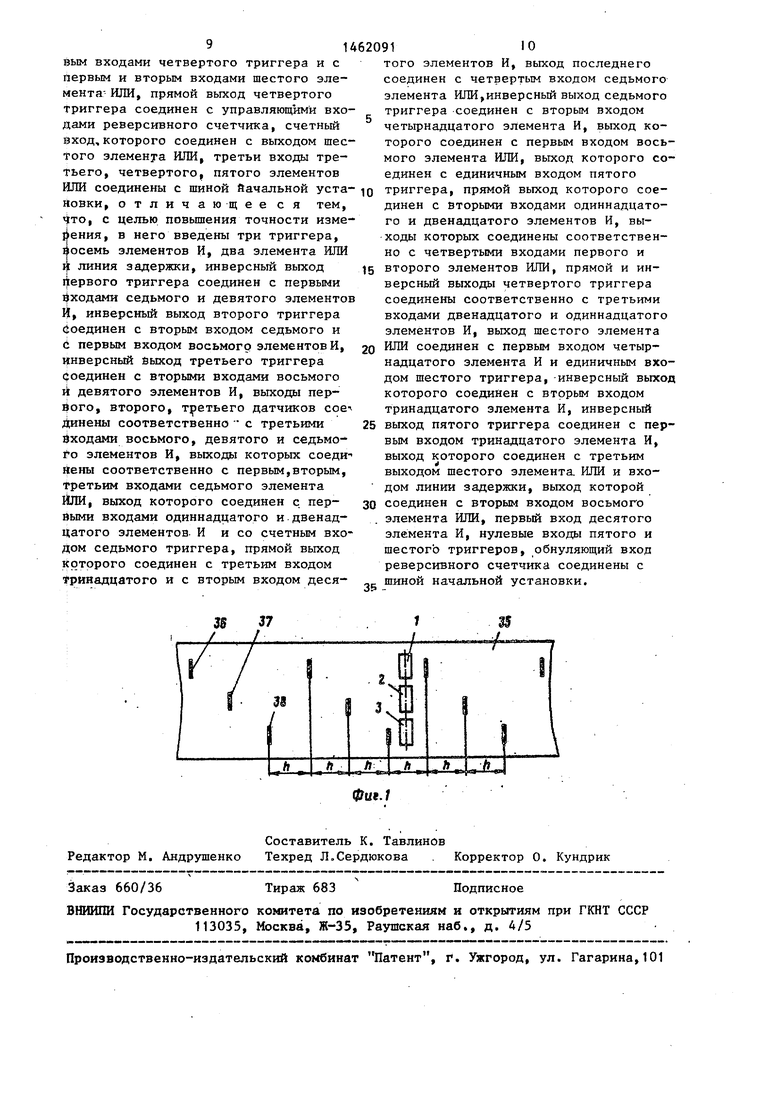
На фиг. 1 приведено расположение меток и датчиков на объекте измерения; на фиг. 2 - функциональная схема устройства.
Устройство содержит датчики 1, 2 3, которые считывают метки, нанесенные на поверхность объекта измерения, .блок 4 анализа последовательности сиг- 1ЙЛОВ, .включающий сем триггеров 5-11, четырнадцать элементов И 12-25, во- 20 семь элементов ИЛИ 26-33, реверсивный счетчик 34., На объекте 35 измерения расположены три,последовательности меток 36, 37 и 38, сопряженных с дат- чиками 1, 2 и 3, вьтолненнце со сме- 25 щением на единицу дискрета перемеще- ия h. Датчики 1, 2 и 3 расположены в одной плоскости,перпендикулярно оси перемещения объекта 35. Блок 4 анализа последовательности сигналов содер- ЗО жит также линию 39 задержки.
Устройство работает следующим образом.
Перед началом измерения устройство приводится в исходное состояние, для чего подается импульсный сигнал
на третьи входы третьего, четвертого, пятого элементов ИЛИ 28, 29 и 30, нулевые входы пятого 9 и шестого 10 триггеров, первый вход десятого элемента ИЖ 21 и на обнуляющий вход реверсивного счетчика 34. При этом если на прямом выходе седьмого триггера 11 был единичный сигнал; то при подаче сигнала начальной установки на выходе десятого элемента И 21 появится сигнал, который, пройдя через восьмой элемент ИЖ 33, поступит на счетный вход седьмого триггера 11, который сработает, что вызовет появление единичного сигнала на его инверсном выходе.
При перемещении объекта 35 датчики 1 , 2 и 3 считывают последовательности меток 36, 37. и 38. Порядок считывания последовательностей меток определяется направлением перемещения. Сигналы с датчиков 1j 2 и 3 поступают в блок 4 анализа последовательности сигналов в порядке, обусловленном взаимным расположением последовательностей меток 36, 37 и 38 на объекте 35 и датчиков 1j2 и 3.
Направление движения объекта 35 определяется в блоке 4 анализа последовательности сигналов путем анализа порядка следования двух сигналов, последовательно поступающих с датчиков в блок.
Так, например, если сигнал (X,,) поступает сначала с первого датчика
щения), что соответствует реальному положению объекта.
Если после первого последовательного срабатьгеания двух датчиков объект будет находиться от начального положения на расстоянии, меньшем одного дискрета перемещения (чему соответствует четное срабатывание седьмого триггера 11), то в реверсивный счетчик 34 будет занесена единица.
В результате последовательного срабатьшания двух датчиков в зависи мости от направления движения на выходе одного из двух открытых элементов И, входящих в состав первых шести элементов И 12-17 появится сигнал, который пройдет через элемент ИЛИ 26 или 27 на один из входов четвертого триггера 8 и один из первых двух входов шестого элемента ИЖ 31. При этом с первого выхода четвертого триггера 8 на управляющий вход реверсивного счетчика 34 поступит в зависимости от направления перемещения объекта 35 единичный или нулевой сигнал
Сигнал с выхода шестого элемента ИЛИ 31 поступает на счетный вход реверсивного счетчика 34, на единичный вход шестого триггера 10 и на первый вход четьфнадцатого элемента И 25, Дальнейшее прохождение сигнала завип сит от состояния седьмого триггера 11. (Чем определяется состояние седьмого триггера 11 рассматривалось выше) . Если имело место четное срабаты вание .седьмого триггера 11, то появится сигнал на выходе четырнадцато
При изменениях направления переме щения объекта происходит непоследовательное срабатывание датчиков, а два срабатывания одного и того же датчика (или несколько срабатываний,
го элемента И 25, открытого единичным Q если объект совершает колебателъно е
выхода седьмого триггера 11,на второй вход четьфнадцатого элемента И 25, с выхода которого сигнал поступает на первый вход восьмого элемента ИЛИ 33, и далее на единичный вход пятого триггера 9. В результате срабатывания пятого триггера 9 связью прямой вь5- ход пятого триггера 9 - вторые входы одиннадцатого 22 и двенадцатого 23 элементов И данный элементы будут открыты, а связью инверсный выход пятого триггера 9 - первый вход тринадцатого элемента И 24 последний бут дет закрыт.
Если имело место нечетное срабатывание седьмого триггера 11, то сигналом с прямого выхода седьмого триггера 11, поступающим на третий вход
тринадцатого элемента И 24, последний будет открыт. Поэтому по заднему фронту сигнала, поступающего с выхода шестого элемента HJEi 31, сработает шестой триггер 10 и единичный сигнал с его инверсного выхода поступит на второй вход открытого тринадцатого элемента И 24. С выхода тринадцатого элемента И 24 сигнал поступит на третий вход шестого элемента ИЛИ 31 к далее с выхода шестого элемента ИЛИ . 31 на счетный вход реверсивного счетчика 34. Поскольку при этом управля- 5 ющий сигнал, поступающий с четвертого триггера 8 не изменился, то в реверсивном счетчике 34 произойдет суммирование двух сигналов. Сигнал с выхода тринадцатого элемента И 24 поступит также на вход линш-i 39 задержки, которая обеспечивает задержку сигнала на время срабатьшания шестого элемента ИЛИ 31 и реверсивного счетчика 34. С выхода линии 39 задержки сигнал поступит на второй вход восьмого элемента ИЛИ 33. Далее сигнал так же, как и в предыд ущем с выхода восьмого элемента- ИЛИ 33;на единичный вход пятого триггера 9, который запирает тринадцатый элемент И 24, прекращая действие дополнительного сигнала и участие седьмого триггера 11 в дальнейшей работе устройства.
При изменениях направления перемещения объекта происходит непоследовательное срабатывание датчиков, а два срабатывания одного и того же датчика (или несколько срабатываний,
0
5
следует случае:
0
5
Q если объект совершает колебателъно е
движение в зоне, не превышающей двух Дискретов перемещения), но как уже отмечалось ранее, при повторном последовательном появлении сигнала с 5 выхода одного и того же датчика появится сигнал на выходе одного из трех элементов И 18, 19, 20, открытого и связанного с этим датчиком. Сигнал с выхода данного элемента И через седьмой элемент 32 1ШИ поступит на первый-.вход одиннадцатого 22 и двенадцатого 23 элементов И. Один из этих двух элементов открыт, а именно тот, на третий вход которого поступает единичный сигнал с одного из выходов четвертого триггера 8.
Состояние четвертого триггера 8. будет определяться направлением перемещения объекта 35 при предыдущем
0
5
2 (Х) или сначаэлементов И 15, 16 и 17, реализующих логическую функцию F,.
Если после включения устройства и первого срабатывания датчика изменяется направление движения объекта 35 то произойдет повторное (четное) сра батывание этого датчика и сигнал с него, пройдя по цепи: один из трех
1, затем с второго
ла с второго 2 (Xj), а потом с третьего 3 (Xj) или сначала с третьего . 3 (Xj),.a следом с первого 1 (X.), то объект 35 перемещается в одном на- правлении. Если сигналы поступают в обратной последовательности, то объект 35 перемещается в противоположном направлении.Ю элементов И 18, 19 и 40, элемент ИЛИ Логические функции F X,X VXjXjVXX 32, седьмой триггер 11, вызовет сра- и F2 X X VX X2 VX2 X oпиcывaют все возбатывание триггера 11 и появление единичного сигйала на его инверсном выходе, При этом связью инверсньй вы- )5 ход седьмого триггера 11 - второй вход-четырнадцатого элемента И 25 открьгоается последний.
можные варианты следования сигналов датчиков при перемещении объекта 35 в каждом из направлений. При этом по- следовй гельность написания обозначений сигналов в каждой из пар элементов логических функций F и F, соответствует порядку прихода сигналов с датчиков. На выходе третьего элемента ИЛИ 26 реализуется логическая функция F,a на выходе второго элемента ИЛИ 27 - логическая функция F. Соответственно, на выходе первого 12,
второго 13 и третьего 14 элементов-И 25 ° прямом выходе.
реализуются элементы логической функ- Четное срабатывание седьмого триггера 11 свидетельствует о том, что к окончанию формирования первого с начала работы устройства элемента
ции FJ : , . а «а выходе четвертого 15, пятого 16 и шестого 17 элементов И - элементы логической функции ,; , и XjX.
Реверсивный счетчик 34 осуществляет алгебраическое суммирование сигналов, поступающих с выхода блока 4 анализа последовательности сигналов и соответствующих элементов логических функций F и F,,.
При срабатывании одного из датчиков 1,2 и 3 сигнал с его выхода, пройдя через соответствующий датчику один из трех открытых элементов И 18,19 и 20, поступает на один из первых трех видов седьмого элемента ИЛИ 32 и с выхода последнего на счетный вход седьмого триггера 11, приводя к его срабатыванию, в результате KOTOpoi o на прямом выходе седьмого триггера 11 появляется единичный сигнал, открьшающий тринадцатый элемент И 24. Сигнал с выхода седьмого элемента ИЛИ 32 через одиннадцатый 22 или двенадцатый 23 элементы И не проходит ввиду того, что эти элементы закрыты из-за нулевого сигнала на прямом вькоде пятого триггера 9. Одновременно срабатывает один из
35
40
.JQ логической функции F или F объект 35 будет находиться на расстоянии, меньшем одного дискрета перемещения от положения, которое он занимал в момент начала измерений.
Нечетное срабатьгеание седьмого триггера 11 свидетельствует о том, что к окончанию формирования первого с начала работы устройства элемента логической функции F или F объект 35 будет находиться на расстоянии, большем одного дискрета перемещения от положения, которое он занимал в момент начала измерений. За начало отсчета перемещения принимается дискрет перемещения, которому соответствует положение объекта в момент начала измерений. Поэтому в случае, когда после первого последе- вательного срабатьшания двух датчиков объект 35 будет находиться от начального положения на расстоянии, большем одного дискрета перемещения (чему соответствует нечетное срабатывание седьмого триггера 11), в устройстве формируется дополнительный сигнал.
45
50
триггеров 5, 6 и 7, который своим пр- который также заносится в реверсивный прямым выходом открьтает один из трех ° счетчик 34, после чего в нем будет
записано число два (перемещение объекта произошло на два дискрета перемеэлементов И 12, 13 и 1.4, реализующих логическую функцию F , и один из трех
1
элементов И 15, 16 и 17, реализующих логическую функцию F,.
Если после включения устройства и первого срабатывания датчика изменяется направление движения объекта 35, то произойдет повторное (четное) срабатывание этого датчика и сигнал с него, пройдя по цепи: один из трех
элементов И 18, 19 и 40, элемент ИЛИ 32, седьмой триггер 11, вызовет сра- элементов И 18, 19 и 40, элемент ИЛИ 32, седьмой триггер 11, вызовет сра-
батывание триггера 11 и появление единичного сигйала на его инверсном выходе, При этом связью инверсньй вы- ход седьмого триггера 11 - второй вход-четырнадцатого элемента И 25 открьгоается последний.
Очевидно, что после повторного изменения направления перемещения объекта и последующего (нечетного) срабатьшания того же датчика, сигнал с него пройдет по указанной цепи и вызовет срабатывание седьмого триггера 1 1 и появление единичного сигнала
логической функции F или F объект 35 будет находиться на расстоянии, меньшем одного дискрета перемещения от положения, которое он занимал в момент начала измерений.
Нечетное срабатьгеание седьмого триггера 11 свидетельствует о том, что к окончанию формирования первого с начала работы устройства элемента логической функции F или F объект 35 будет находиться на расстоянии, большем одного дискрета перемещения от положения, которое он занимал в момент начала измерений. За начало отсчета перемещения принимается дискрет перемещения, которому соответствует положение объекта в момент начала измерений. Поэтому в случае, когда после первого последе- вательного срабатьшания двух датчиков объект 35 будет находиться от начального положения на расстоянии, большем одного дискрета перемещения (чему соответствует нечетное срабатывание седьмого триггера 11), в устройстве формируется дополнительный сигнал.
срабатывании датчика (в зависимости от направления перемещения на первом выходе будет единичный или нулевой сигнал). С вьпсода одиннадцатого 22 (или двенадцатого 23) элемента И сигнал поступит на четвертый вход первого 26 (или второго 27) элемента ИЛИ Далее сигнал поступит через шестой
ет в зону , т.е. сместится на два дискрета перемещения относительно начала отсчета. После срабатывания второго датчика 2 в устройстве будет реализован злемент логической функции F Х,Х и в реверсивный счетч ик 34
будет записана единица, однако при наличии единичного сигнала на прямом элемент ИЛИ 31 на счетный вход ревер- ю выходе седьмого триггера 11 будет
сивного счетчика 34, а также на вход четвертого триггера 8, приводя к его срабатыванию, в результате которого в реверсивньй счетчик будет занесена единица со знаком, противоположным знаку единицы, перед этим записанной в реверсивный счетчик 34.
Следовательно, при каждом повторном сраба.тывании одного и: того же датчика, свидетельствующем об изменении направления перемещения, в реверсивном счетчике 34 будет осуществляться сложение (вычитание) единицы, если перед этим в нем производилось вычитание (сложение) единицы.
Таким образом, путем учета каждого из срабатьшаний датчиков устройство обеспечивает определение дискрета перемещения, которому соответствует в текущий момент положение объекта относительно его начального положения
Рассмотрим на примере перемещение объекта 35 и соответствующие этому перемещению показания реверсивного датчика 34.
Пусть в момент начала измерения объект 35 находится в таком положении, что считываемая первой метка располагается в интервале, при котором возможно срабатывание первого или третьего датчика (в зависимости от того, в каком направлении будет перемещаться объект), т.е. объект будет находиться в зоне Х Х (дискрет перемещения, определяющий начало отсчета) . И пусть перейещение происходит в таком направлении, что первым сра- батьшает первый датчик 1 (объект перейдет после этого в зону Х Xj, т.е. переместится на один дискрет перемещения) . После срабатывания первого датчика 1 установится единичный сигнал на прямом выходе седьмого триггера 11 и произойдет подготовка к реализации элемента логической функции X, Xj (или X, хр . Если объект 35 продолжает двигаться, не меняя направления перемещения, тогда после срабатывания второго датчика 2 он попада15
30
35
40
45
50
сформирован дополнительный сигнал, который обеспечит запись еще одной единицы в реверсивный счетчик 34. В результате объект 35 переместится на два дискрета перемещения и в реверсив ном Д атчике будет, соответственно, записано число два.
Формула изобретения
20
Устройство для измерения линейных и угловых перемещений, содержащее три датчика, реверсивный счетчик, блок анализа последовательности сигналов, 25 включающий четыре триггера, шесть
элементов И, шесть элементов ИЛИ, выход первого датчика соединен с единичным входом первого триггера, первыми входами первого и пятого элементов И, выход второго датчика соединен с единичным входом второго триггера, первьми входами второго и шестого элементов И, выход третьего датчика соединен с единичным входом третьего триггера, первыми входами третьего и четвертого элементов И, прямой выход первого триггера соединен с вторыми входами второго и четвертого элементов И, прямой выход второго триггера соединен с вторыми входами третьего и пятого элементов И, прямой выход третьего триггера соединен с вторыми входами первого и шестого элементов И, выходы первого, второго, третьего элементов И соединены соответственно с первым, вторым, третьим входами первого элемента ИЛИ и с первыми входами пятого, третьего и четвертого элементов ИЛИ, выходы четвертого, пятого, шестого элементов И соединены соответственно с -первым, вторым, третьим входами второго элемента ИЛИ и с вторыми входами третьего, четвертого, пятого элементов ИЛИ, выходы которых подключены соответственно к нулевым входам первого, второго, третьего триггеров, выходы первого и второго элементов ШШ соединены соответственно с единичным и нуле-
55
ет в зону , т.е. сместится на два дискрета перемещения относительно начала отсчета. После срабатывания второго датчика 2 в устройстве будет реализован злемент логической функции F Х,Х и в реверсивный счетч ик 34
сформирован дополнительный сигнал, который обеспечит запись еще одной единицы в реверсивный счетчик 34. В результате объект 35 переместится на два дискрета перемещения и в реверсивном Д атчике будет, соответственно, записано число два.
Формула изобретения
20
0
5
0
5
0
Устройство для измерения линейных и угловых перемещений, содержащее три датчика, реверсивный счетчик, блок анализа последовательности сигналов, 5 включающий четыре триггера, шесть
элементов И, шесть элементов ИЛИ, выход первого датчика соединен с единичным входом первого триггера, первыми входами первого и пятого элементов И, выход второго датчика соединен с единичным входом второго триггера, первьми входами второго и шестого элементов И, выход третьего датчика соединен с единичным входом третьего триггера, первыми входами третьего и четвертого элементов И, прямой выход первого триггера соединен с вторыми входами второго и четвертого элементов И, прямой выход второго триггера соединен с вторыми входами третьего и пятого элементов И, прямой выход третьего триггера соединен с вторыми входами первого и шестого элементов И, выходы первого, второго, третьего элементов И соединены соответственно с первым, вторым, третьим входами первого элемента ИЛИ и с первыми входами пятого, третьего и четвертого элементов ИЛИ, выходы четвертого, пятого, шестого элементов И соединены соответственно с -первым, вторым, третьим входами второго элемента ИЛИ и с вторыми входами третьего, четвертого, пятого элементов ИЛИ, выходы которых подключены соответственно к нулевым входам первого, второго, третьего триггеров, выходы первого и второго элементов ШШ соединены соответственно с единичным и нуле-
5
вым входами четвертого триггера и с первым и вторым входами шестого элемента- ИЛИ, прямой выход четвертого триггера соединен с управляющими входами реверсивного счетчика, счетный вход,которого соединен с выходом шестого элемента ИЛИ, третьи входы третьего, четвертого, пятого элементов ИЛИ соединены с шиной йачальной установки, отличающее ся тем, , с целью повьшения точности измерения, в него введены три триггера, восемь элементов И, два элемента ИЛИ и линия задержки, инверсный выход i epBoro триггера соединен с первыми ходами седьмого и девятого элементов И, инверсный выход второго триггера соединен с вторым входом седьмого и С первым входом восьмого элементов И, инверсный зВыход третьего триггера соединен с вторыми входами восьмого и девятого элементов И, выходы пер- його, второго, третьего датчиков сое- Динены соответственно с третьими Входами восьмого, девятого и седьмого элементов И, выходы которых соеди йены соответственно с первьм,вторым, третьим входами седьмого элемента ИЛИ, выход которого соединен с. первыми входами одиннадцатого и двенадцатого элементов. И и со счетным входом седьмого триггера, прямой выход которого соединен с третьим входом тринадцатого и с вторым входом десяСоставитель К. Тавлинов Редактор М. Андрушенко Техред Л.Сердюкова . Корректор 0. Кундрик
Заказ 660/36
Тираж 683
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
того элементов И, выход последнего соединен с четвертым входом седьмого элемента ИЛИ,инверсный выход седьмого триггера соединен с вторым входом четырнадцатого элемента И, выход которого соединен с первым входом восьмого элемента ИЛИ, выход которого соединен с единичным входом пятого
триггера, прямой выход которого соединен с вторыми входами одиннадцатого и двенадцатого элементов И, выходы которых соединены соответственно с четвертыми входами первого и
второго элементов ИЛИ, прямой и инверсный выходы четвертого триггера соединены соответственно с третьими входами двенадцатого и одиннадцатого элементов И, выход шестого элемента
ИЛИ соединен с первым входом четырнадцатого элемента И и единичным входом шестого триггера,-инверсный выход которого соединен с вторым входом тринадцатого элемента И, инверсный
выход пятого триггера соединен с первым входом тринадцатого элемента И, выход которого соединен с третьим выходом шестого элемента ИЛИ и вхо- дом линии задержки, выход которой
соединен с вторым входом восьмого элемента ИЛИ, первый вход десятого элемента И, нулевые входы пятого и шестого триггеров, обнуляющий вход реверсивного счетчика соединены с
35 шиной начальной установки.
Подписное
| Устройство для измерения линейных и угловых перемещений | 1982 |
|
SU1179095A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
