фцг.Г Изобретение относится к дискретным системам управления и измерительной техники, предназначено для интегрирования; дискретных сигналов и может быть использовано в системах управления, навигации подвижных объектов. Цепь изобретения - повьшение точности интегрирования монотонно изменякяцихся дискретных сигналов без уменьшения периода дискретности На фиг. 1 представлена схема адап тивной системы интегрирования дискретных сигналов; на фиг. 2 - ана лизатор изменения входного сигнала, Система содержит (фиг. 1) квантователь 1 входного сигнала по времени анализатор 2 характера изменения входного сигнала, переключатель 3, интеграторы 4 и 5 по правилам прямоугольников и трапеций, элемент ИЛИ 6 Интеграторы имеют Z-передаточные функции: W,(Z) yzz-:r - интегратор 4 по правилу прямоугольниковW,p(Z) - интегратор 5 по -. , -.. . 2 1-Zправилу трапеций;;Т - период дискретности. Анализатор 2 характера изменения входного сигнала (фиг. 2) состоит из элемента 7 памяти, блока 8 вычислени разности и порогового элемента 9 с релейной характеристикой и зоной нечувствительности, равной g.j,. На выходе блока 8 вычисления разности первого порядка имеем ux(kT) x(kT) - xC(k - 1)Т, (1) а пороговый элемент 9 реализует условия (ux(kT)U , Ux(kT)|7/e где , - допустимая величина разности. Пороговый элемент 9 управляет переключателем 3, который выполнен на реле 10 с нормально разомкнутым 11 и замкнутым 12 контактами. Выход блока разности соединен с пороговым элементом 9, к выходу которого подключена обмотка реле 10 с контактами 11 и 12, к которым подключены интеграторы 4 и 5. Адаптивная система интегрирования работает следующим образом. Дискретный сигнал x(kT) с квантователя 1 через переключатель 3 поступает на интегратор 4 по правилу прямоугольников и с него в виде x(kT) на элемент ИЛИ 6. Одновременно x(kT) подается на анализатор 2, в котором формируется первая разность. Если модуль первой разности превысит доп) то срабатывает переключатель 3, отключая от квантователя интегратор 4 по правилу прямоугольников и подключая интегратор 5 по правилу трапеций.
ILJ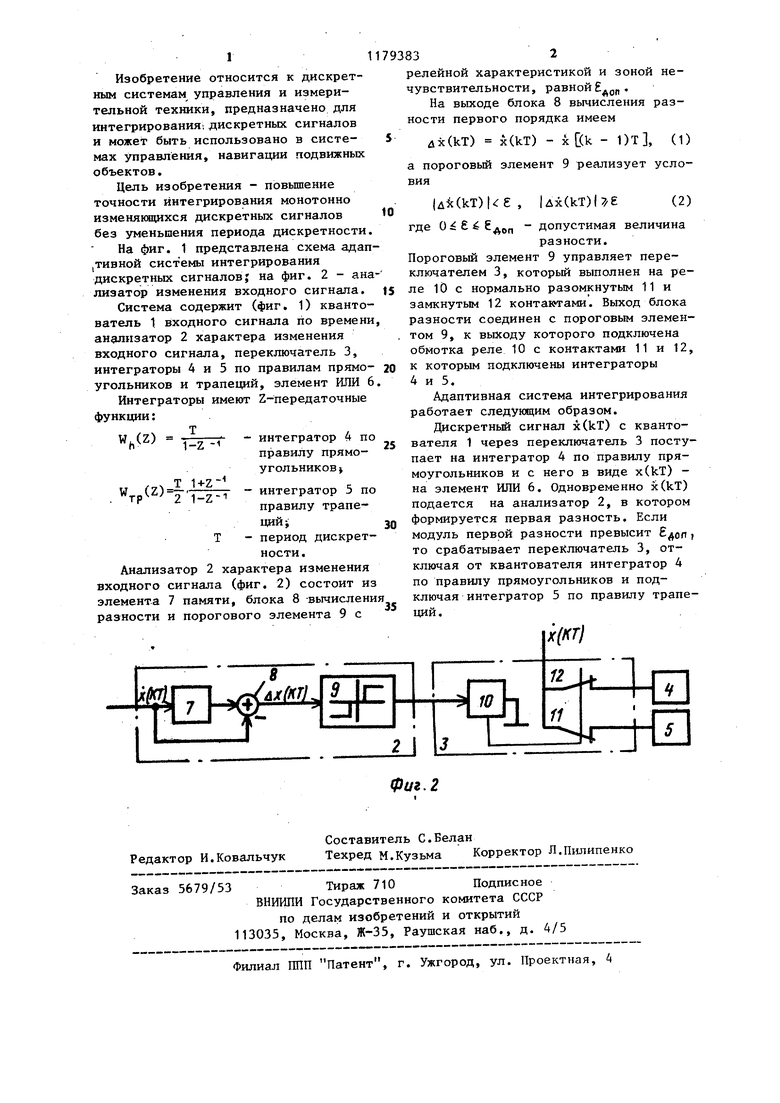
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система интегрирования дискретных сигналов | 1986 |
|
SU1439630A1 |
| Адаптивный дискретный согласованный фильтр | 1981 |
|
SU995284A1 |
| ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ ГАРМОНИЧЕСКОГО СИГНАЛА | 2008 |
|
RU2368909C1 |
| СПОСОБ АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ ИЗМЕРИТЕЛЬНЫХ СИГНАЛОВ | 2009 |
|
RU2444125C2 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОИЗВОДНЫХ ОТ КУСОЧНО-ПОЛИНОМИАЛЬНЫХ ФУНКЦИЙ | 1991 |
|
RU2047903C1 |
| Аналого-цифровой преобразователь совмещенного интегрирования | 1989 |
|
SU1695503A1 |
| НЕКОГЕРЕНТНЫЙ ПРИЕМНИК ЧАСТОТНО-МАНИПУЛИРОВАННЫХ СИГНАЛОВ С МИНИМАЛЬНЫМ СДВИГОМ | 2007 |
|
RU2373658C2 |
| Аналого-цифровой преобразователь совмещенного интегрирования | 1991 |
|
SU1785075A1 |
| МНОГОКАНАЛЬНЫЙ СИНТЕЗАТОР И СПОСОБ ДЛЯ ФОРМИРОВАНИЯ МНОГОКАНАЛЬНОГО ВЫХОДНОГО СИГНАЛА | 2005 |
|
RU2345506C2 |
| Цифровой анализатор спектра | 1979 |
|
SU798615A1 |
АДАПТИВНАЯ СИСТЕМА ИНТЕГРИРОВАНИЯ ДИСКРЕТНЫХ СИГНАЛОВ, содержащая квантователь входного сигнала по времени, вход которого является входом системы, и интегратор по правилу прямоугольников, отличающая с я тем, что, с целью ровьпиения точности интегрирования монотонно изменяющихся дискретных сигналов без уменьшения периода дискретности, в нее введены анализатор характера изменения вхолл пп сигнала, выцолненньй на последовательно соединенных элементе памяти, блоке вычисления разности и порого-вом элементе, переключатель, интегратор по правилу трапеции и элемент ИЛИ, выход которого является выходом системы, а входы подключены к выходам интегратора по правилу прямоугольников и интегратора по правилу трапеции, выход квантователя входного сигнала по времени подключен к информационному входу переключателя, входу элемента памяти анализатора характера изменения i входного сигнала и другому входу блока вычисления разности анализа(Л тора характера изменения входного С сигнала, выход порогового элемента анализатора характера изменения входного сигнала подключен к управляющему входу переключателя, выходами соединенного со входами интегратора по правилу прямоугольников и интегратора по правилу трапеций. QD О9 00 СО XJKTl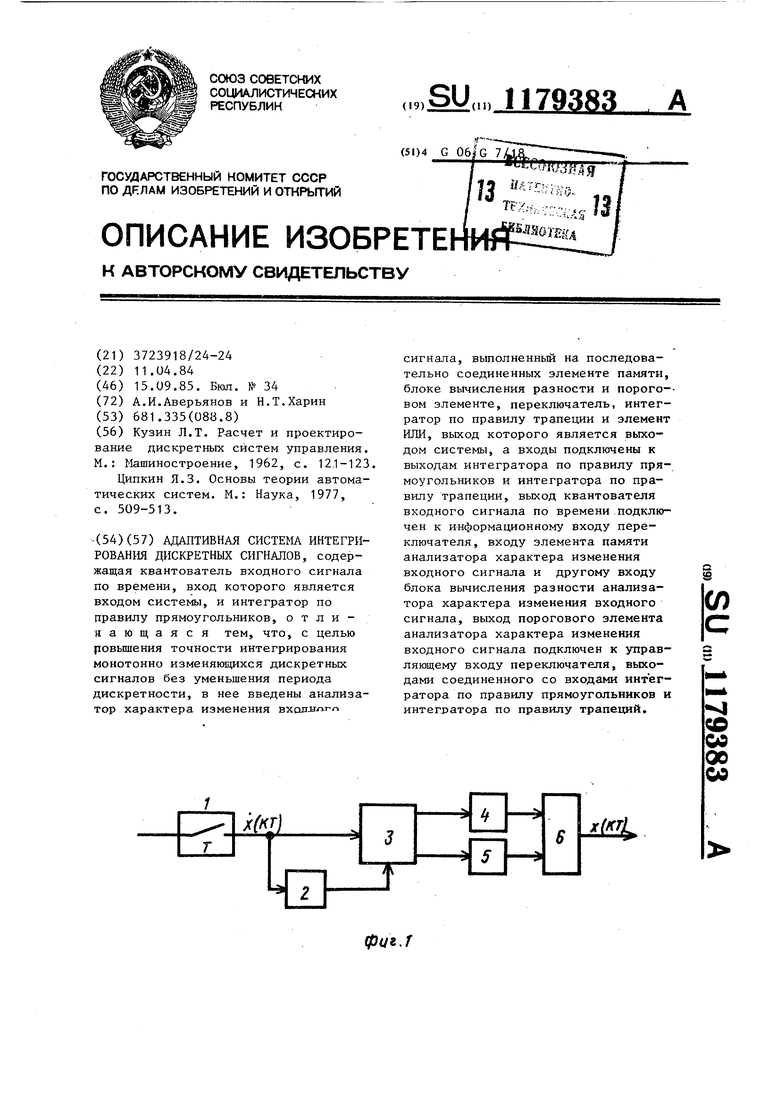
| Кузин Л.Т | |||
| Расчет и проектирование дискретных систем управления | |||
| М | |||
| : Шшиностроение, 1962, с | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Ципкин Я.З | |||
| Основы теории автоматических систем | |||
| М.: Наука, 1977, с | |||
| Инерционно-аккумуляторное приспособление для автоматического открывания и закрывания поршневого затвора | 1912 |
|
SU509A1 |
