Изобретение относится к машиностроению и может быть использовано в конструкциях адаптивных промышленных роботов.
Цель изобретения - повышение надежности схвата в работе путем определения положения детали до захватывания и в процессе захвата детали.
На фиг. 1 изображен схват с П-образной траекторией луча, общий вид; на фиг. 2 - схват с одним зеркалом; на фиг. 3 - схват с двумя зеркалами и рядом расположенным источником света и фотоприемником.
Очувствленный схват манипулятора содержит пальцы 1 и 2 с закрепленными на их рабочих концах губками 3 и 4, на внутренних рабочих поверхностях которых установлены зеркала 5 и 6, источник 7 света, фотоприемник 8, установленные на нерабочих концах пальцев 1 и 2. Зеркала заглублены относительно рабочей плоскости губок и непараллельны им.
Устройство работает следующим образом.
В исходном состоянии, когда объекта 9 нет в рабочей зоне схвата, свет свободно проходит между губкам и, при этом он проходит от источника 7 света (фиг. 1), отражается от зеркала 5 или 6, попадает на фотоприемник 8.
При использовании устройства по фиг. 2 свет проходит от источника 7 света, отражается от зеркала 5 и попадает на фотоприемник 8.
При использовании устройства по фиг. 3 свет проходит от источника 7, отражается от зеркал 5, 6 и 5 попадает на фотоприемник 8, в котором преобразуется в электрический сигнал.
При захвате непрозрачного объекта 9 поток света, попадавшего на фотоприемник 8, прекращается вследствие перекрытия его объектом 9. Электрический сигнал отсутствует. По наличию электрического сигнала судят об отсутствии объекта 9 в зоне захвата либо о том, что объект занимает такое положение в губках, при котором край его силуэта не выступает за траекторию луча.
Изобретение позволяет создать надежные схваты промыщленных роботов с автоматическим контролем наличия и положения объекта в губках схвата и расширить область их применения.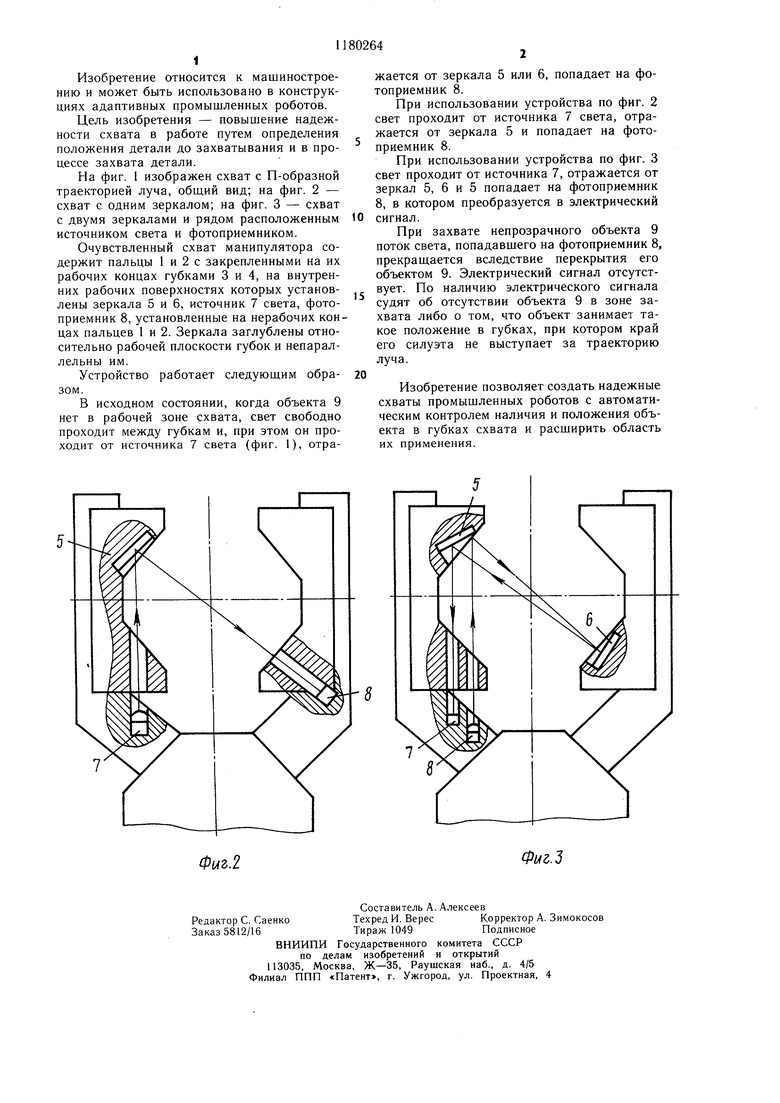
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ВЫСОКОТОЧНОГО ИЗМЕРЕНИЯ ФИЗИКО-ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ОБЪЕКТА | 2007 |
|
RU2353925C1 |
| Очувствленный схват промышленного робота | 1984 |
|
SU1180263A1 |
| КЕРАТОМЕТР | 1994 |
|
RU2068674C1 |
| Очувствленный схват манипулятора | 1984 |
|
SU1178587A2 |
| ДВУХКООРДИНАТНЫЙ ФОТОЭЛЕКТРИЧЕСКИЙ ЦИФРОВОЙ АВТОКОЛЛИМАТОР | 2013 |
|
RU2535526C1 |
| ФОТОЭЛЕКТРИЧЕСКИЙ ИНТЕРПОЛЯТОР ИЗМЕРИТЕЛЬНЫХ СИГНАЛОВ | 1973 |
|
SU369423A1 |
| УСТРОЙСТВО ЛОКАЦИИ ПРОСТРАНСТВА С ДВОЙНОЙ ЗОНОЙ ЧУВСТВИТЕЛЬНОСТИ | 2020 |
|
RU2729948C1 |
| Устройство для управления движением дорожно-строительной машины | 1990 |
|
SU1749336A1 |
| Автоматический фотоэлектрический анализатор | 1985 |
|
SU1733978A1 |
| ФОТОЭЛЕКТРИЧЕСКАЯ АВТОКОЛЛИ.МАЦИОННАЯ ТРУБА | 1965 |
|
SU170707A1 |
ОЧУВСТВЛЕННЫЙ СХВАТ, содержащий пальцы с губками, источник и приемник света, отличающийся тем, что, с целью повышения надежности его в работе, он снабжен по меньшей мере одним зеркалом, размещенным на рабочей поверхности губки, оптически связывающим источник и приемник света, которые размещены на пальцах схвата. ОС о tc о 4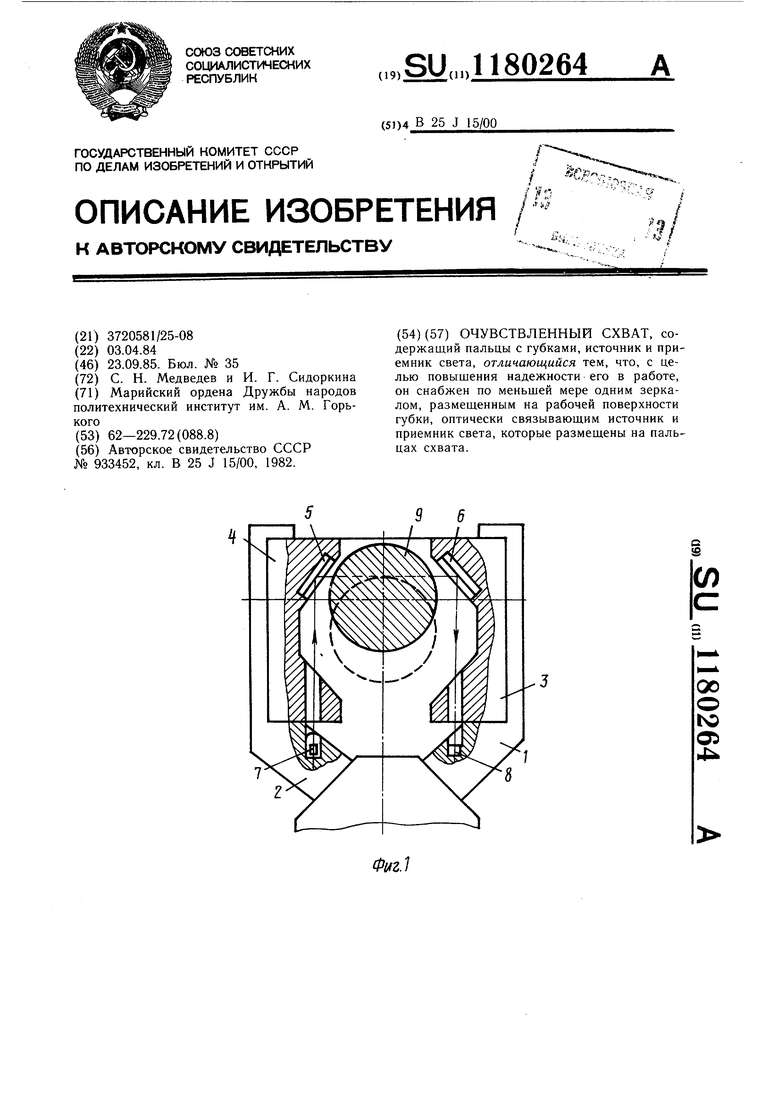
| Очувствленный захват манипулятора | 1980 |
|
SU933452A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
