Изобретение относится к машиностроению и может быть использовано в рабочих ораганах адаптивных промышленных роботов.
По основному авт. св. № 933452 известен очувствленный схват манипулятора, содержаш,ий пальцы с прикрепленными к ним эластичными губками, по крайней мере в одной из которых выполнен полый канал, параллельный рабочей поверхности губки, а с противоположных концов канала установлены источник света и фотоприемник ClJ,
Однако известный схват позволяет судить лишь об усилии зажима, но не дает возможности контролировать положение зажатого объекта в схвате, что снижает его функциональные возможности.
Цель изобретения - расширение функциональных возможностей схвата.
Поставленная цель достигается тем, что очувствленный схват манипулятора снабжен блоком сравнения, а одна из губок выполнена переменной жесткости но длине канала, при этом выходы фотоприемников каждой губки подключены к блоку сравнения.
На чертеже схематически изображен схват, общий вид.
Схват содержит пальцы 1 и 2 с закрепленными на них губками 3 и 4 из эластичного материала, в которых выполнены полые каналы 5 и 6 соответственно, расположенные параллельно рабочей поверхности губок. Одна из губок, например 3, выполнена с переменной по длине канала жесткостью, а другая - 4с постоянной. Напротив концов обоих каналов расположены с
одной стороны эквивалентные источники электромагнитного излучения, например лампы 7 накаливания, а с другой стороны - фотоприемники 8 и 9 у каналов 5 и 6 соответственно, фотоприемники связаны с блоком 10 сравнения сигналов. Позицией 11 обозначен захватываемый объект.
Схват работает следующим образом. В исходном состоянии перед взятием объекта 11 губки 3 и 4 не деформированы, и свет от ламп 7 свободно проходит через каналы 5 и 6, попадая на фотопримники 8 и 9, в которых преобразуется в одинаковые электрические сигналы. При захвате и сжатии объекта 11 ( имеющего, например,
, правильную цилиндрическую форму) губки 3 и 4 деформируются, происходит изгиб каналов 5 и 6, что приводит к уменьшению их проходного сечения и, соответсвенно, света, попадающего на фотонриемники 8 и 9, и уменьшению тока, протекающего через них.
При этом, если величина тока, протекающего через фотоприемники 8, зависит лишь от усилия сжатия, то величина тока, протекающего через фотоприемник 9, зависит также от положения объекта в схвате вдоль канала в губке 4, что происходит за счет изменения величины деформации канала по определенному закону в зависимости от места приложения нагрузки из-за переменной жесткости материала губки и по длине канала. Наличие разницы в силе токов, протекающих
через фотоприемники 8 и 9, определяемой в блоке 10 сравнения, позволяет судить о положении объекта в схвате. После освобождения объекта 1 губки 3 и 4 каналы 5 и б возвращаются в исходное состояние.
| название | год | авторы | номер документа |
|---|---|---|---|
| Очувствленный захват манипулятора | 1980 |
|
SU933452A1 |
| Очувствленный схват | 1984 |
|
SU1180264A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Схват манипулятора | 1984 |
|
SU1271743A2 |
| Захват манипулятора | 1982 |
|
SU1047680A2 |
| Устройство управления схватом манипулятора | 1987 |
|
SU1442395A2 |
| Очувствленный схват промышленного робота | 1984 |
|
SU1180263A1 |
| Схват манипулятора | 1984 |
|
SU1301698A1 |
| МАНИПУЛЯТОР С ОСЯЗАТЕЛЬНЫМ ОЧУВСТВЛЕНИЕМ | 1969 |
|
SU234763A1 |
| Очувствленный схват промышленного робота | 1983 |
|
SU1104017A1 |
ОЧУВСТВЛЕННЫЙ СХВАТ МАНИПУЛЯТОРА по авт. св. № 933452, отличающийся тем, что, с целью расширения функциональных возможностей, он снабжен блоком сравнения, а одна из губок выполнена переменной жесткости по длине канала, при этом выходы фотоприемников каждой губки подключены к блоку сравнения. i (Л 00 ел 00 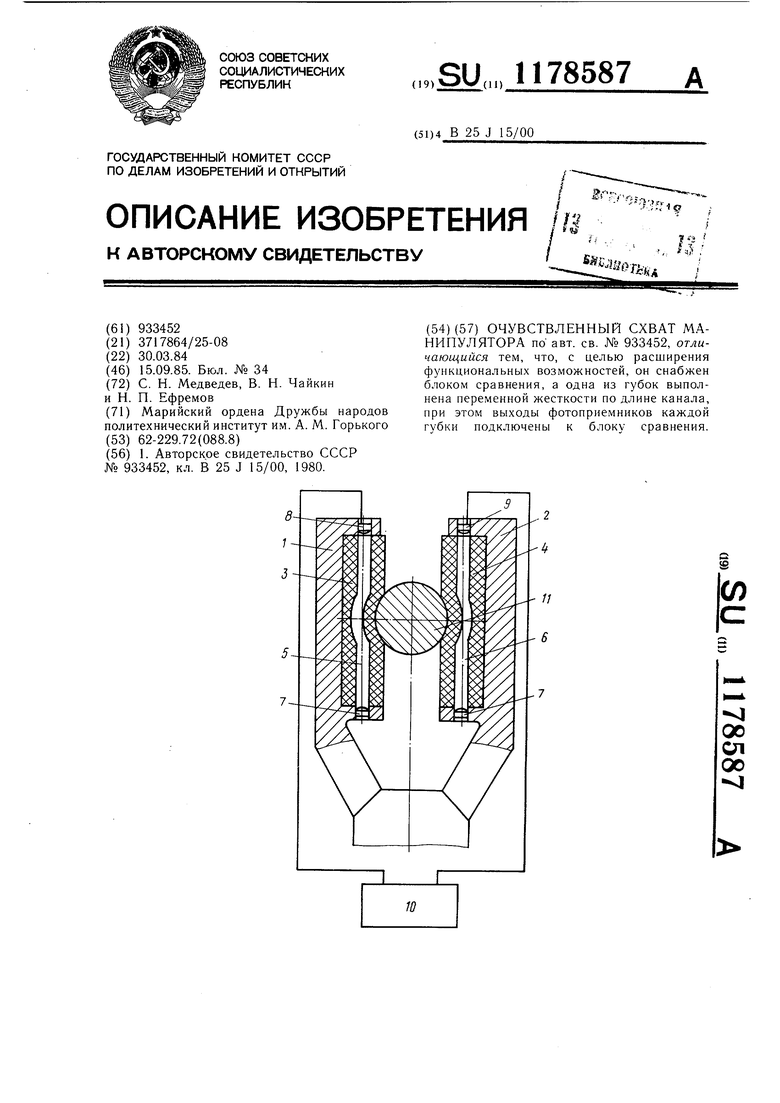
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Очувствленный захват манипулятора | 1980 |
|
SU933452A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
