Изобретение относится к устройствам для управления движением, а именно курсом дорожно-строительных, в частности маркировочных машин, используемых для разметки дорожного покрытия.
Известно устройство для управления движением колесных и гусеничных машин, содержащее проложенные вдоль заданной траектории движения проводники, подключенные к генератору переменного тока, и установленные на транспортном средстве приемники, связанные с исполнительным блоком-приводом транспортного средства.
Недостатком такого устройства является необходимость прокладки проводников- кабеля вдоль трассы движения и необходимость стабильного источника-генератора переменного тока.
Наиболее близким по технической сущности является устройство управления движением транспортного средства, например трактором, в котором на пути имеется опорная полоса, в качестве которой используется, например, борозда или граница вспаханного и невспаханного поля, а на транспортном средстве приемник - фоточувствительный элемент и установленные на одной оптической оси под углом к ней обращенные рабочей поверхностью друг к другу и к опорной полосе зеркала, одно из которых установлено с возможностью поворота, осветитель и фотоприемник, связанный входом оптически с другим зеркалом, а выходом - с блоком определения отклрне- ния от курса, выход которого соединен с исполнительным блоком.
Недостатком этого устройства являются необходимость наличия сплошной опорной траектории (ориентиры), зависимость точности системы от взаимного расположения машины по опорной траектории, а также повышенная сложность и пониженная надежность в связи с наличием нескольких движущихся механизмов системы ориентации.
сл
с
U) СО
о
Кроме того, при управлении не учитывается фактический угол установки колес и отсутствует устройство, учитывающее скорость движения машины, что снижает точность вождения машиной.
Цель изобретения - повышение точности управления.
Поставленная цель достигается тем, что устройство для управления движением до- рожно-строительной машины, содержащее отражающий элемент, рассредоточенный на опорной траектории вдоль пути следования, излучатель, фотоприемник, два зеркала, одно из которых оптически связано с фотоприемником, усилитель, выход которого соединен с исполнительным механизмом, снабжено датчиком положения направления машины, датчиком скорости, блоком управления, двумя коллиматорами и двумя модуляторами с различными частотами световой модуляции, причем излучатель установлен между модуляторами, один из которых через первый коллиматор оптически свчзан с первым зеркалом, а другой через второй коллиматор - с вторым зеркалом, которое оптически связано через отражающий элемент с фотоприемником, причем датчик скорости подключен к первому входу блока управления, к второму входу которого подключен фотоприемник, датчик положения направления колес машины подключен к третьему входу блока управления, выход которого подключен к входу усилителя, а блок управления выполнен в виде двух частотных фильтров, двух формирователей импульсов, задатчик а угла установ- к и второго зеркала, измерителя временного интервала, умножителя и двух преобразбвагелей, причем первые входы первого преобразователя и умножителя объединены и являются первым входом блока управления, входы частотных фильтров объединены и являются вторым входом блока управления, второй вход первого преобразователя является третьим входом блока управления, в ыходы частотных фильтров через соответствующие формирователи импульсов подключены к соответствующим входам измерителя временного интервала, выход которого соединен с вторым входом умножителя, задатчик угла установки через второй преобразователь соединен с третьим входом умножителя, выход которого подключен к третьему входу первого преобразователя, выход которого является выходом блока управления.
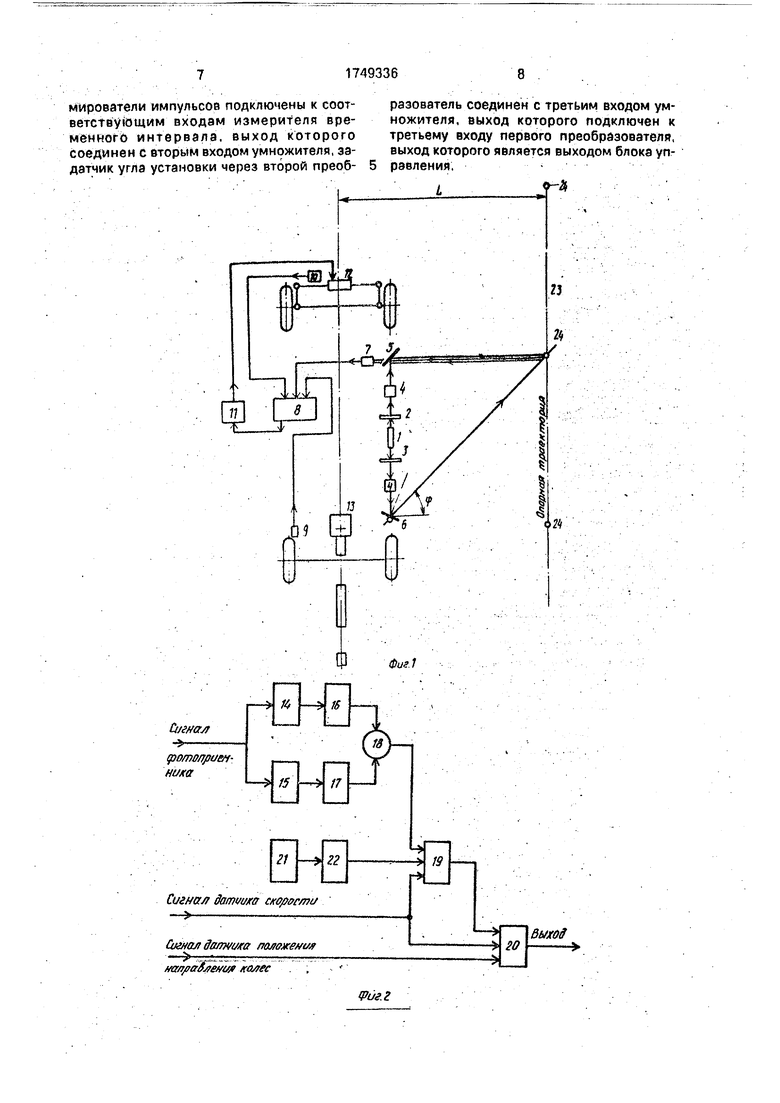
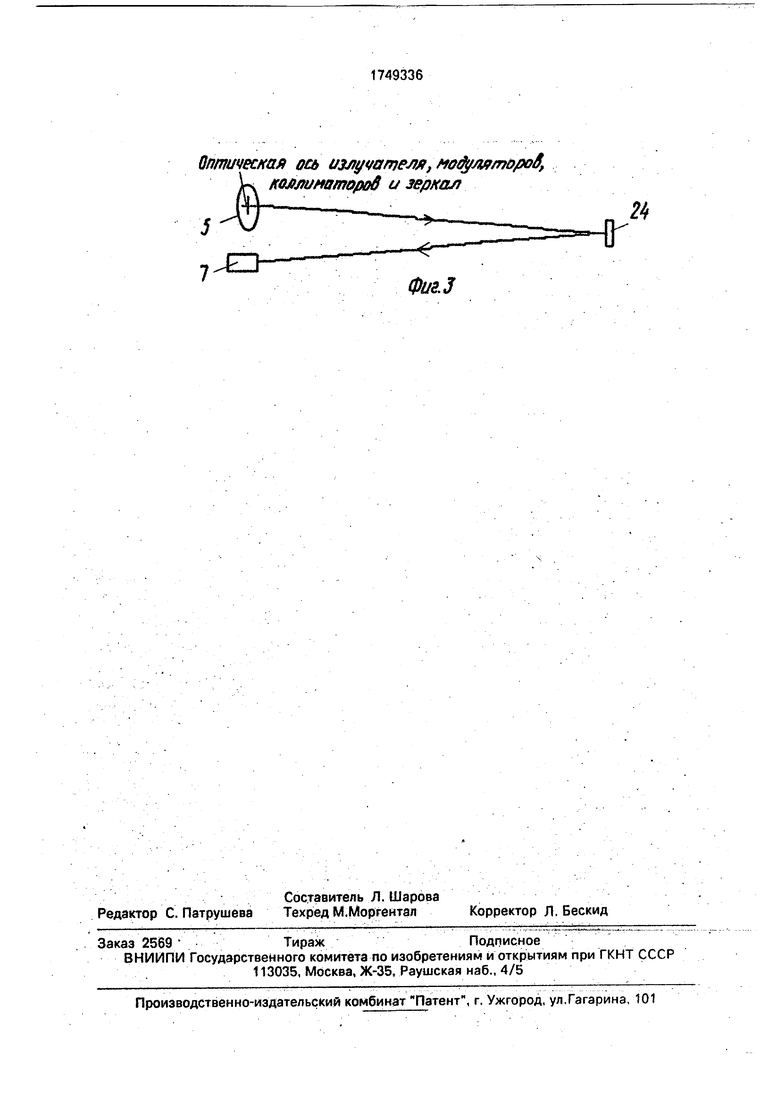
На фиг, 1 представлена функциональная схема устройства; на фиг,2 - функциональная схема блоки управления исполнительным механизмом; на фиг.З - изображение хода световых лучей в проекции на вертикальную плоскость.
Устройство содержит установленный на
дорожно-строительной машине излучатель 1, модуляторы 2 и 3 с различными частотами модуляции световых лучей, коллиматоры 4 для формирования лучей, зеркала 5 и 6, фотоприемник 7, блок 8 управления исполнительным механизмом (управляемыми колесами или рабочим органом), датчик 9 скорости, датчик 10 положения направле- ния колес машины, усилитель 11 и исполнительный механизм 12 регулирующего
органа 13.
Блок 8 управления исполнительным механизмом включает частотные фильтры 14 и 15, формирователи 16 и 17 импульсов, измеритель 18 временного интервала, умножитель 19, преобразователь 20, задатчик 21 угла установки зеркала 6 и преобразователь 22.
На пути расположена опорная траектория 23 выполнена из отражающих элементов 24, представляющих собой поверхность вращения или часть поверхности вращения, например кнопок. Устройство работает следующим образом.
Перед началом производства работ, например перед проведением разметки про- езжей части дороги, формируется опорная траектория 23. из светоотражающих элементов 24. Светоотражающие элементы
представляют собой поверхность вращения или часть поверхности вращения из светоотражающего материала, устанавливаются на разметочные кнопки, столбики, заставки или другие имеющиеся средства.-расставляемые вдоль опорной траектории, например, по оси дороги или вдоль кромки проезжей части. Интервал определяется кривизной дороги в плане (чем меньше радиус кривизны, тем чаще следует устанавливать светоотражающие элементы).
Машина устанавливается первоначально вдоль траектории на заданном расстоянии L (фиг.1), причем луч, отраженный от одного из светоотражающих элементов 24,
падающий на него с неподвижного зеркала 5, должен попадать в фотоприемник 7. Подвижное зеркало 6 устанавливается путем его перемещения вдоль оси машины или поворота вдоль вертикальной оси так,
чтобы луч от него Отражался от того же светоотражающего элемента 24 в фотоприемник.
Лучи на зеркало 5 и подвижное зеркало 6 попадают от источника 1 света, например
лазерного излучателя через мбдуляторы 2 и
3 формирующие световые импульсы с различной частотой, и через коллиматоры 4, обеспечивающие заданную форму луча.
Для обеспечения высокой точности лучи должны иметь узкую диаграмму направленности в плане, а для компенсации возмож- ных неровностей дороги, высоты установки светоотражающих элементов и высоты установки оптической системы на машине должны в вертикальной плоскости излучаться в виде сектора.
Таким образом, при заданном расстоянии L от рабочего органа до опорной траектории лучи от зеркал 5 и б, модулированные различной частотой, отражаясь от элемента 24, попадают в фотоприемник 7 одиовре- менно, При отклонении положения машины от заданной опорной траектории на величину A L или при повороте на угол а лучи с различной частотой модуляции, отраженные от зеркал 5 и б, попадают в фотопри- емник 7 неодновременно. Сигналы с фотоприемника попадают в блок 8 управления исполнительным механизмом.
Блоком 8 управления на основеанализа разности времени прихода сигналов с раз- личной частотой вырабатывается управляющий сигнал, который после усиления усилителем 11 поступает на исполнительный механизм 12, регулирующий положение управляемых колес машины, либо положение ее рабочего органа 13. На блок 8 управления также поступают сигналы с датчика 9 скорости машины, и с датчика 10 положения направления колес относительно оси машины. В момент приема сигналов
фотоприемников 7(фиг 1) полезные сигналы от фильтров 14 и 15 (фиг 2) поступают в формирователи 16 и 17 импульсов. Импульсы с формирователей 16 и 17 импульсов поступают на входы измерителя 18 времен- ного интервала (часы), на выходе которого формируется сигнал, пропорциональный разности времени прихода сигналов с различной частотой модуляции. Сигнал с измерителя 18 временного интервала поступает на первый вход умножителя 19. На выходе умножителя формируется сигнал отклонения положения машины от заданной опорной траектории, который пропорционален разности времени г прихода сигналов с различной частотой модуляции с фотопрй- емника, котангенсу угла р установки подвижного зеркала 6 в плане (фиг.1) и скорости движения машины V. Сигналы угла установки и скорости подаются на вход ум- ножителя 19 (фиг.2), причем сигнал, пропорциональный ctg, поступает с задатчика 21 угла установки подвижного зеркала через
преобразователь 20. Управляющий сигнал, вырабатываемый блоком 8 управления зависит от величины отклонения машины от опорной траектории, угла установки управляемых колес и скорости машины
Этот сигнал формируется преобразователем 22,
Данное устройство учитывает сигналы от скорости движения машины и фактический угол установки колес, что повышает точность вождения машины при нанесении линии разметки на дорожное покрытие, исключая операцию нанесения предварительной разметки и применение ручного труда при производстве этой операции
Формула изобретения 1. Устройство для управления движением дорожно-строительной машины, содержащее отражающий элемент, рассредоточенный на опорной траектории вдоль пути следования, излучатель, фотоприемник, деа зеркала, одно из которых оптически связано с фотоприемником, усилитель, выход которого соединен с исполнительным механизмом, отличающееся тем, что, с целью повышения точности управления, оно снабжено датчиком положения направления колес машины, датчиком скорости, блоком управления, двумя коллиматорами и двумя модуляторами с различными частотами световой модуляции, причем излучатель установлен между модуляторами, один из которых через первый коллиматор оптически связан с первым зеркалом, а другой через второй коллиматор - с вторым зеркалом, которое оптически связано через отражающий элемент с фотоприемником, причем датчик скорости подключен к первому входу блока управления, к второму входу которого подключен фогоприемник, датчик положения направления колес машины подключен к третьему входу блока управления, вь(ход которого подключен к входу усилителя,
2. Устройство поп 1,отличающее- с я тем, что блок управления выполнен в виде двух частотных фильтров, двух формирователей импульсов, задатчика угла установки второго зеркала, измерителя временного интервала, умножителя и двух преобразователей, причем первые входы первого преобразователя и умножителя объединены и являются первым входом блока управления, входы частотных фильтров объединены и являются вторым входом блока управления, второй вход первого преобразователя является третьим входом блока управления, выходы частотных фильтров через соответствующие формирователи импульсов подключены к соответствующим входам измерителя временного интервала, выход которого соединен с вторым входом умножителя, зэ- датчик угла установки через второй преоб-
разователь соединен с третьим входом умножителя, выход которого подключен к третьему входу первого преобразователя, выход которого является выходом блока управления.
-
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НА РАБОЧЕЙ ПЛОЩАДКЕ | 1991 |
|
RU2014417C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2089708C1 |
| СПУТНИКОВАЯ ЛАЗЕРНАЯ ДАЛЬНОМЕРНАЯ СИСТЕМА | 1992 |
|
RU2037849C1 |
| ПРОЗРАЧНОМЕР МОРСКОЙ ВОДЫ | 2006 |
|
RU2341786C2 |
| ЛАЗЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2090707C1 |
| СПОСОБ КОНТРОЛЯ ОПТИЧЕСКОГО ВЗАИМОДЕЙСТВИЯ С ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2188389C2 |
| ОПТИЧЕСКИЙ АБСОРБЦИОННЫЙ ГАЗОАНАЛИЗАТОР | 1996 |
|
RU2109269C1 |
| Акустооптоэлектронный спектроанализатор | 1988 |
|
SU1613971A1 |
| Устройство для контроля неплоскостности | 1981 |
|
SU1024709A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1990 |
|
RU2025042C1 |
Использование: управление курсом до- рожно-строительных машин, в частности разметки дорожного покрытия. Сущность изобретения: устройство содержит излучатель 1, модуляторы 2 и 3 , коллиматоры 4, зеркала 5 и 6, фотоприемник 7, блок 8 управления, датчик 10 скорости, датчик 11 положения направления колес машины, усилитель 11 и исполнительный механизм 12. 1 з.п.ф-лы, 3 ил.
(ротолрием- ниха
Иптичккая ось излучателя, мофмтйроб, коллиматоров и зеркал
24
(pi/sJ
| Драновский А.И | |||
| и др | |||
| Основы построения индукционных систем автоматического вождения тракторов по эквидистантным линиям | |||
| - Сборник научных трудов НАТИ, вып.219, М., 1972.С.90-92 | |||
| Способ автоматического вождения колесных машин и устройство для его осуществления | 1987 |
|
SU1523069A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
