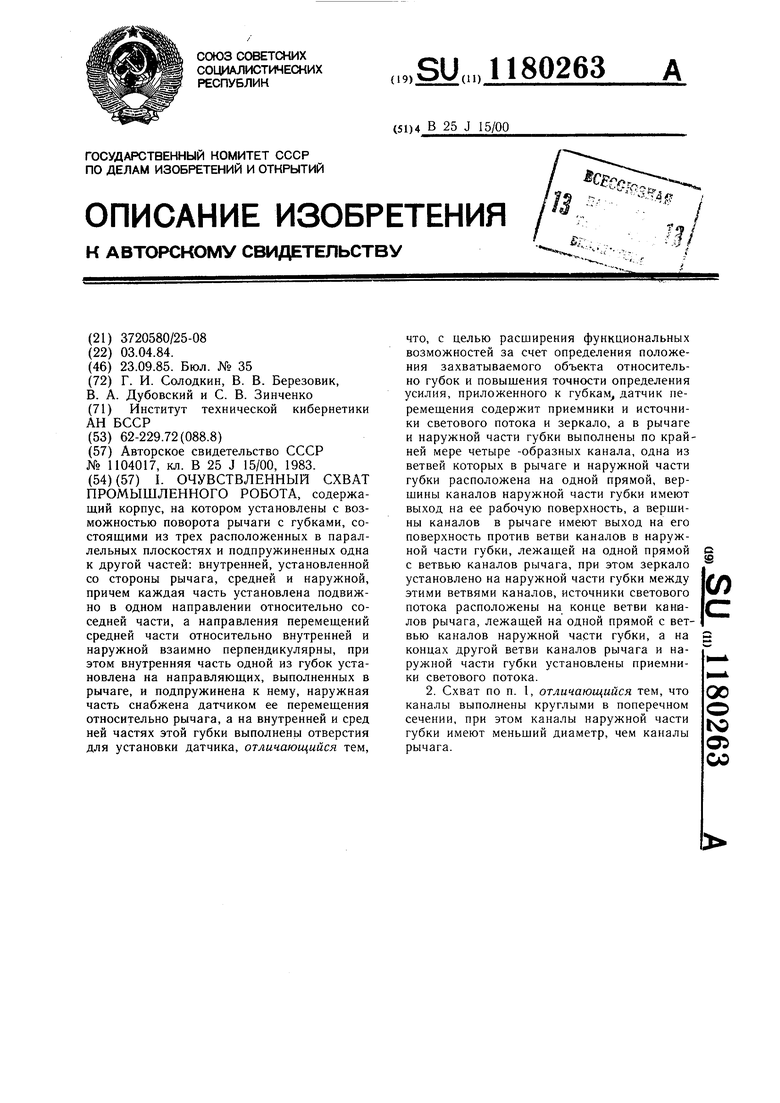
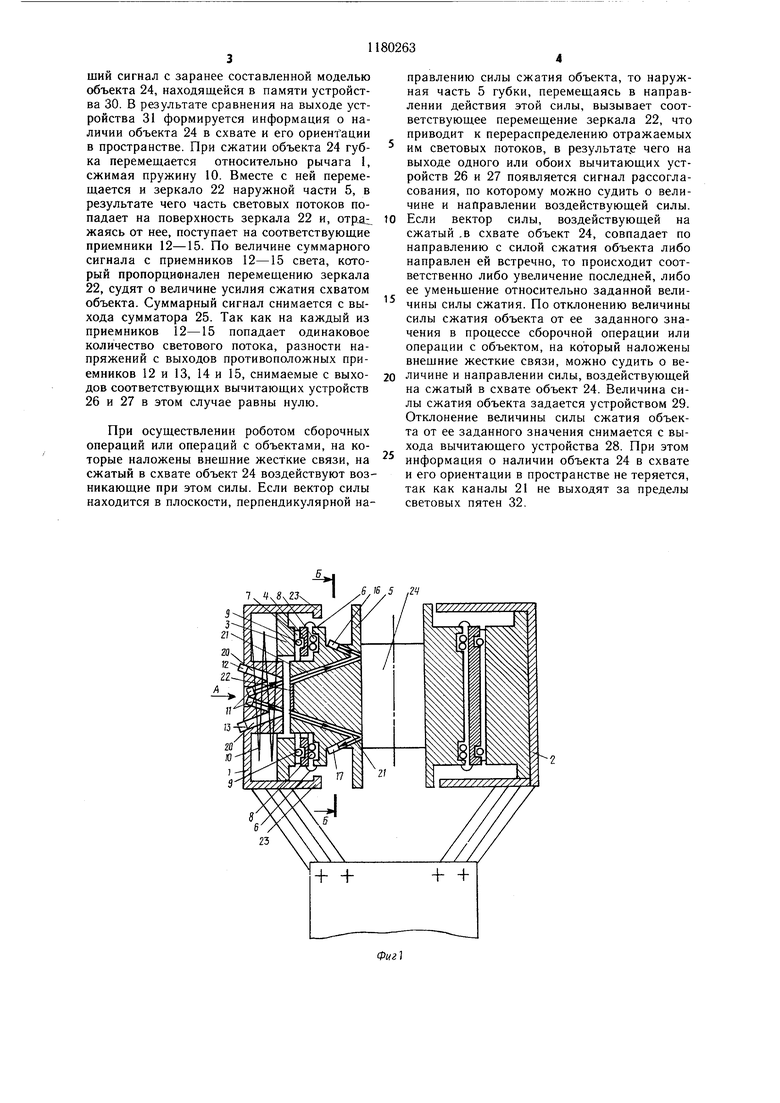
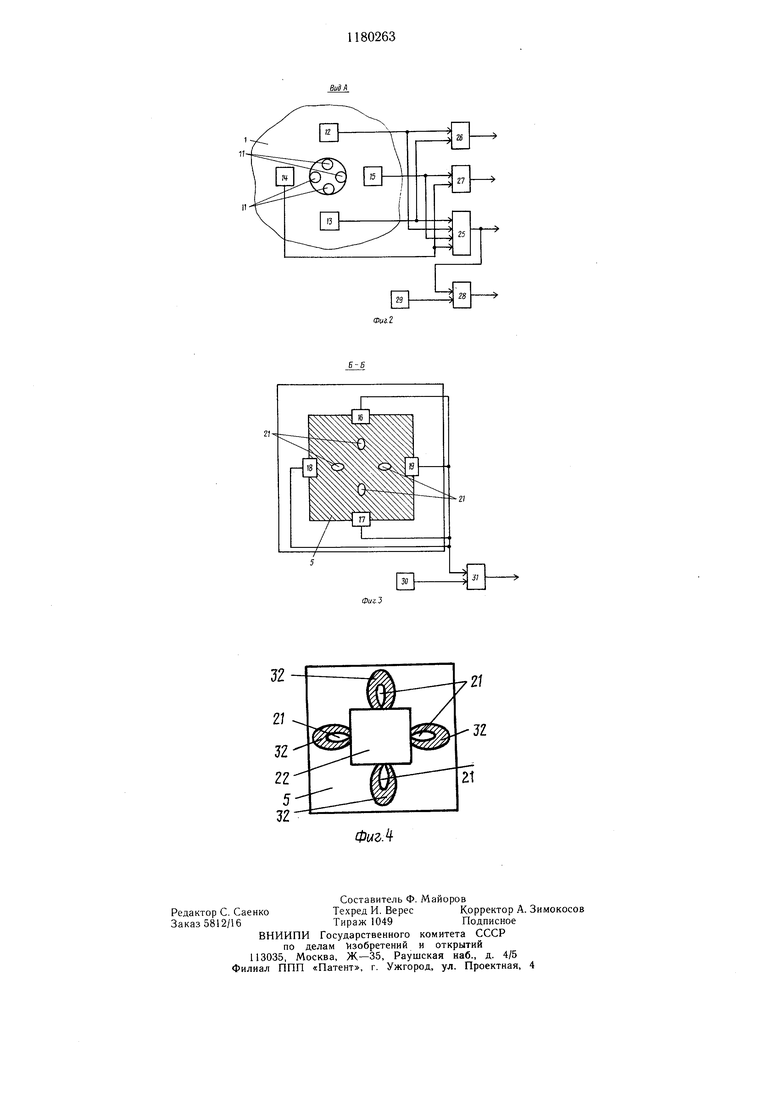
Изобретение относится к робототехнике, в частности к сборочным роботам, и может быть использовано, когда требуется силовое очувствление роботов. Цель изобретения - расширение функциональных возможностей с|5вата и повышение точности опрделения усилия, приложенного к губкам при захватывании и переносе объекта, за счет выполнения датчика положения губки относительно рычага чувствительным к положению объекта в схвате. На фиг. 1 показан схват промышленного робота, обш,ий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - расположение зеркала на ч,а,сти губки. Очувствленный схват промышленного робота содержит установленные на корпусе с возможностью поворота рычаги 1 и 2, на каждом из которых установлена губка, выполненная из трех частей: внутренней 3, средней 4 и наружной 5, лежаш,их в параллельных плоскостях, связанных между собой двумя взаимно перпендикулярными парами пружин 6 и 7 и подвижных одна относительно другой вдоль шариковых направляюших 8 и 9. Губка, расположенная на рычаге 1, имеет установленную подвижно относительно него наружную часть 5, которая подпружинена к рычагу пружиной 10. Датчик перемешения наружной части губки относительно рычага содержит расноложенные в рычаге 1 источники 11 светового потока, приемники 12-15 светового потока и расположенные на наружной части 5 губки приемники 16-19 светового потока. В рычаге 1 и наружной части 5 губки выполнены по крайней мере четыре -образных канала 20 и 21 соответственно, одна из ветвей которых в рычаге 1 и наружной части 5 губки расположена на одной прямой. Вершины каналов 21 имеют выход на рабочую поверхность наружной части 5 губки. Каждая вершина каналов 20 в рычаге 1 имеет выход на его поверхность против ветви каналов 21, лежашей на одной прямой с ветвью каналов 20, при этом на наружной части 5 губки между этими ветвями каналоё 21 установлено зеркало 22. Источники 11 светового потока расположены на конце ветви каналов 20 рычага 1, лежашей на одной прямой с ветвью каналов 21, а приемники 12-15 светового потока - на концах другой ветви каналов 20 и 21. Последние выполнены круглыми в поперечном сечении. Каналы 21 имеют меньший диаметр, чем каналы 20. На рычаге 1 выполнена направляюшая поверхность с выступами 23. Захватываемый объект обозначен позицией 24. Электрическая блок-схема обработки сигналов от приемников 12-15 светового потока (фиг. 2) содержит сумматор 25, вычитающие устройства 26-28 и задаюш,ее устройство 29, выход которого соединен с одним из входов вычитающего устройства 28, второй вход которого соединен с выходом сумматора 25, первый вход которого соединен с приемником 12 и одним из входов вычитающего устройства 26, второй входс приемником 13 и вторым входом вычитающего устройства 26, третий вход - с приемником 15 и одним из входов вычитающего устройства 27, а четвертый вход - с приемником 14 и вторым входом вычитающего устройства 27. Электрическая блок-схема обработки сигналов от приемников 16-19 светового потока (фиг. 3) содержит задающее устройство 30 и устройство 31 сравнения, входы которого связаны соответственно с задающим устройством 30 и приемниками 16-19. Часть 5 губки схвата установлена с возможностью перемещения относительно части 4 вдоль шариковых направляющих 8 только в одном направлении, определяемом пружиной 6, а часть 4 установлена с возможностью перемещения относительно части 3 вдоль шариковых направляющих 9 только в одном направлении, определяемом пружиной 7. Так как пружины 6 и 7 взаимно перпендикулярны, то часть 5 может перемещаться параллельно части 3 в любом направлении. В качестве источников 11 светового потока могут быть использованы светодиоды, а в качестве приемников 12-19 светового потока - фотоэлементы. Каналы 20 выполнены со светопоглощающими стенками, т.е. не являются волноводами, с целью получения на их выходе световых лучей с четкой границей. Каналы 21 представляют собой волноводы. Зеркало 22 выполнено в форме квадрата (фиг. 4). Схват работает следующим образом. Перед включением в работу составляют модель захватываемого объекта 24 на основании его характерных точек. Эти данные заносят в устройство 30. Каналы 21 располагаются таким образом, что они открытыми концами находятся над характерными точками объекта 24. В исходном состоянии перед взятием объекта 24 внутренняя часть 3 губки под действием пружины 10 сдвинута относительно рычага 1 до выступов 23. Световые потоки от источников 11 направляются по соответствующим каналам 20 и падают на наружную часть 5 в виде световых пятен 32 (фиг. 4). При этом часть световых потоков Попадает в каналы 21. В этом случае световые потоки не попадают на соответствующие им приемники 12-19. При захвате объекта 24 его поверхность закрывает открытые вершины каналов 21. Световые потоки отражаются от объекта 24 в характерных точках, воспринимаются соответствующими приемниками 16-19, электрические сигналы с выходов которых поступают на устройство 31 сравнения, которое сравнивает поступивший сигнал с заранее составленной моделью объекта 24, находящейся в памяти устройства 30. В результате сравнения на выходе устройства 31 формируется информация о наличии объекта 24 в схвате и его ориентации в пространстве. При сжатии объекта 24 губка перемещается относительно рычага 1, сжимая пружину 10. Вместе с ней перемещается и зеркало 22 наружной части 5, в результате чего часть световых потоков попадает на поверхность зеркала 22 и, отрд жаясь от нее, поступает на соответствующие приемники 12-15. По величине суммарного сигнала с приемников 12-15 света, который пропорционален перемещению зеркала 22, судят о величине усилия сжатия схватом объекта. Суммарный сигнал снимается с выхода сумматора 25. Так как на каждый из приемников 12-15 попадает одинаковое количество светового потока, разности напряжений с выходов противоположных приемников 12 и 13, 14 и 15, снимаемые с выходов соответствующих вычитающих устройств 26 и 27 в этом случае равны нулю.
При осуществлении роботом сборочных операций или операций с объектами, на которые наложены внещние жесткие связи, на сжатый в схвате объект 24 воздействуют возникающие при этом силы. Если вектор силы находится в плоскости, перпендикулярной направлению силы сжатия объекта, то наружная часть 5 губки, перемещаясь в направлении действия этой силы, вызывает соответствующее перемещение зеркала 22, что приводит к перераспределению отражаемых
им световых потоков, в результату чего на выходе одного или обоих вычитающих устройств 26 и 27 появляется сигнал рассогласования, по которому можно судить о величине и направлении воздействующей силы.
Если вектор силы, воздействующей на сжатый .в схвате объект 24, совпадает по направлению с силой сжатия объекта либо направлен ей встречно, то происходит соответственно либо увеличение последней, либо ее уменьщение относительно заданной величины силы сжатия. По отклонению величины силы сжатия объекта от ее заданного значения в процессе сборочной операции или операции с объектом, на который наложены внещние жесткие связи, можно судить о величине и направлении силы, воздействующей на сжатый в схвате объект 24. Величина силы сжатия объекта задается устройством 29. Отклонение величины силы сжатия объекта от ее заданного значения снимается с выхода вычитающего устройства 28. При этом информация о наличии объекта 24 в схвате и его ориентации в пространстве не теряется, так как каналы 21 не выходят за пределы световых пятен 32.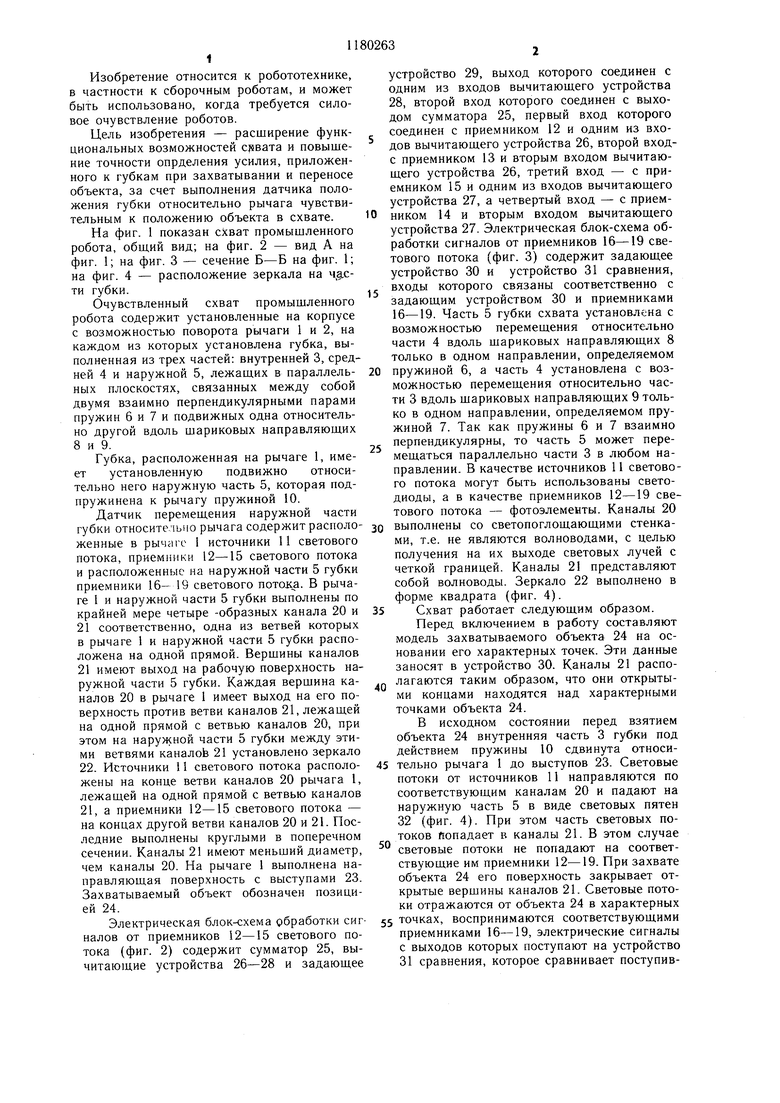
| название | год | авторы | номер документа |
|---|---|---|---|
| Очувствленный схват промышленного робота | 1983 |
|
SU1104017A1 |
| Очувствленный схват робота | 1990 |
|
SU1815223A1 |
| Схват промышленного робота | 1977 |
|
SU662344A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Очувствленный схват робота | 1985 |
|
SU1373565A1 |
| Адаптивный схват | 1986 |
|
SU1395480A1 |
| Очувствленный схват | 1984 |
|
SU1180264A1 |
| Схват очувствленного робота | 1984 |
|
SU1227464A1 |
| Очувствленный схват промышленного робота | 1988 |
|
SU1593956A1 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
Авторское свидетельство СССР № 1104017, кл. В 25 J 15/00, 1983.
I. ОЧУВСТВЛЕННЫЙ СХВАТ ПРОМЫШЛЕННОГО РОБОТА, содержащий корпус, на котором установлены с возможностью поворота рычаги с губками, состоящими из трех расположенных в параллельных плоскостях и подпружиненных одна к другой частей: внутренней, установленной со стороны рычага, средней и наружной, причем каждая часть установлена подвижно в одном направлении относительно соседней части, а направления перемещений средней части относительно внутренней и наружной взаимно перпендикулярны, при этом внутренняя часть одной из губок установлена на направляющих, выполненных в рычаге, и подпружинена к нему, наружная часть снабжена датчиком ее перемещения относительно рычага, а на внутренней и сред ней частях этой губки выполнень отверстия для установки датчика, отличающийся тем. что, с целью расщирения функциональных возможностей за счет определения положения захватываемого объекта относительно губок и повыщения точности определения усилия, приложенного к губкам датчик перемещения содержит приемники и источники светового потока и зеркало, а в рычаге и наружной части губки выполнены по крайней мере четыре -образных канала, одна из ветвей которых в рычаге и наружной части губки расположена на одной прямой, вершины каналов наружной части губки имеют выход на ее рабочую поверхность, а вершины каналов в рычаге имеют выход на его поверхность против ветви каналов в наружной части губки, лежащей на одной прямой S с ветвью каналов рычага, при этом зеркало установлено на наружной части губки между этими ветвями кана.тов, источники светового потока расположены на конце ветви каналов рычага, лежащей на одной прямой с ветвью каналов наружной части губки, а на концах другой ветви каналов рычага и наружной части губки установлены приемники светового потока. 2. Схват по п. 1, отличающийся тем, что ас о tc каналы выполнены круглыми в поперечном сечении, при этом каналы наружной части губки имеют меньший диаметр, чем каналы О5 рычага. 00