Изобретение относится к области .машиностроения и может быть использовано в про1 лшленных роботах и манипуляторах.;
Известен очувствленный захват промышленного робота, содержащий губки, каждая из которых выполнена в виде баллона из эластичного тонкостенного материала.Захват снабжен датчиками усилия зажима, позволяющими осуществлять регулирование величины этого усилия flj.
Недостатком известного захвата является низкая надежность, обусловленная тем, что вследствие быстрого износа и разрыва оболочки губки происходит разгерметизация баллона и выход захвата из строя.
изобретения является поыашение надежности очувствленного захвата в работе.
Это достигается тем, что захват снабжен источником света и фотоприемником, а по крайней мере в одной из губок выполнен не менее чем один полый канал, параллельный рабочей поверхности губки, причем у противоположных концов канала установлены источник света и фотод тчик.
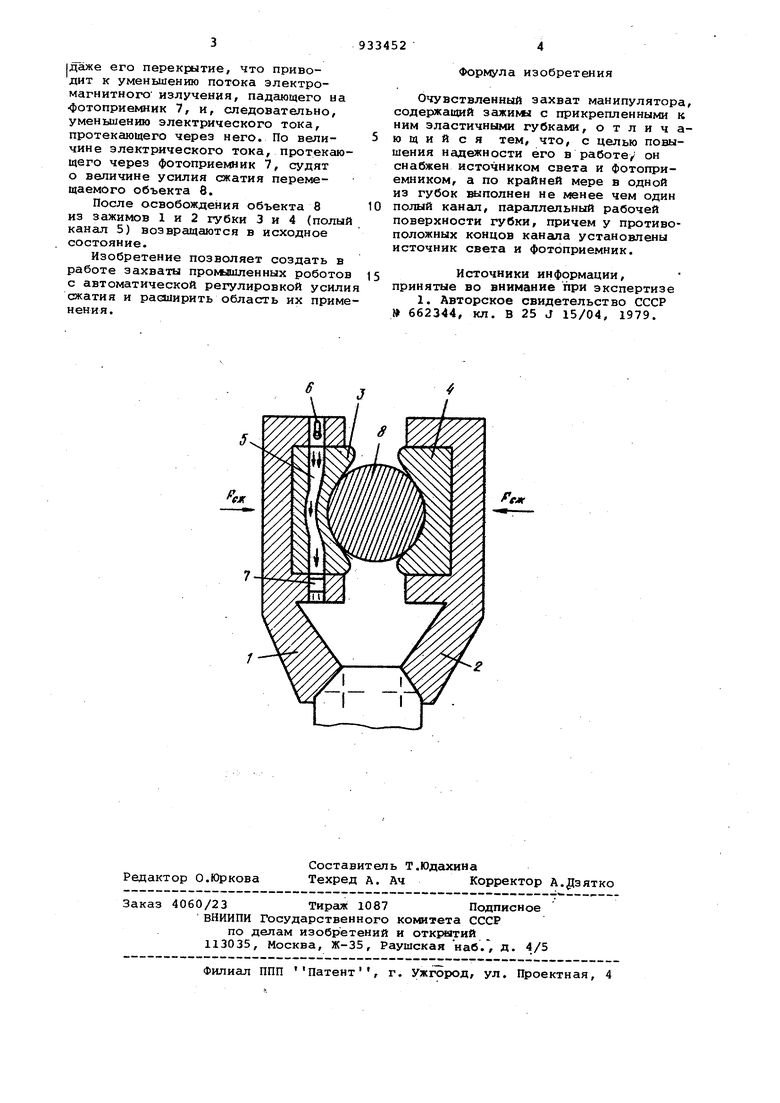
На чертеже изображен предлагаемый захват, разрез.
Захват прокышленного робота с датчиком усилия сжатия содержит зажикы 1 и 2, губки 3 и 4, выполненные из однородного эластичного деформируемого материала, хорошо поглощающего свет, например каучука,и приклеенные к зажимам 1 и 2 соответст10венно, полый канал 5, имеющийся, например, в губке 3 и расположенный перпендикулярно направлению усилия сжатия РСЖ напротив концов которого в зажиме закреплен с одной
15 стороны источник электромагнитного излучения, например лампа накаливания 6, а с другой стороны - фотоприемник 7.
Устройство работает следующим
20 образом.
В исходном состоянии перед взятием объекта 8 губки 3 и 4 не дефор. мированы, и электромагнитное излучение от лампы 6 свободно проходит через полый канал 5 и попадает на фотоприемник 7, в котором преобразуется в электрический сигнал.
При захвате fi сжатии объекта 8 губки 3 и 4 деформируются,происхо30дит изгибание полого канала 5 или
I даже его перекрытие, что приводит к уменьшению потока электромагнитного излучения, падающего на фотоприемник 7, и, следовательно, уменьшению электрического тока, протекающего через него. По величине электрического тока, протекающего через фотоприемник 7, судят о величине усилия сжатия перемещаемого объекта 8.
После освобождения объекта 8 из зажимов 1 и 2 губки 3 и 4 (полый канал 5) возвращаются в исходное состояние.
Изобретение позволяет создать в работе захваты прокыштенных роботов с автоматической регулировкой усили сжатия и расширить область их применения.
Формула изобретения
Очувствленный захват манипулятора содержащий зажикн с прикрепленными к ним эластичными губками, отличающийся тем, что, с целью повышения надежности его в работе/ он снабжен источником света и фотоприемником, а по крайней мере в одной из губок заполнен не менее чем один полый канал, параллельный рабочей поверхности губки, причем у противоположных концов канала установлены источник света и фотоприемник.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 662344, кл. В 25 J 15/04, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| Очувствленный схват манипулятора | 1984 |
|
SU1178587A2 |
| Захват промышленного робота | 1980 |
|
SU918086A1 |
| Схват манипулятора | 1984 |
|
SU1301698A1 |
| Очувствленный схват | 1984 |
|
SU1180264A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Схват манипулятора | 1984 |
|
SU1271743A2 |
| МИКРОСХВАТ С СИЛОВЫМ ОЧУВСТВЛЕНИЕМ | 2004 |
|
RU2261170C1 |
| Захват манипулятора | 1982 |
|
SU1047680A2 |
| Захватное устройство манипулятора | 1989 |
|
SU1669713A1 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
