00
о
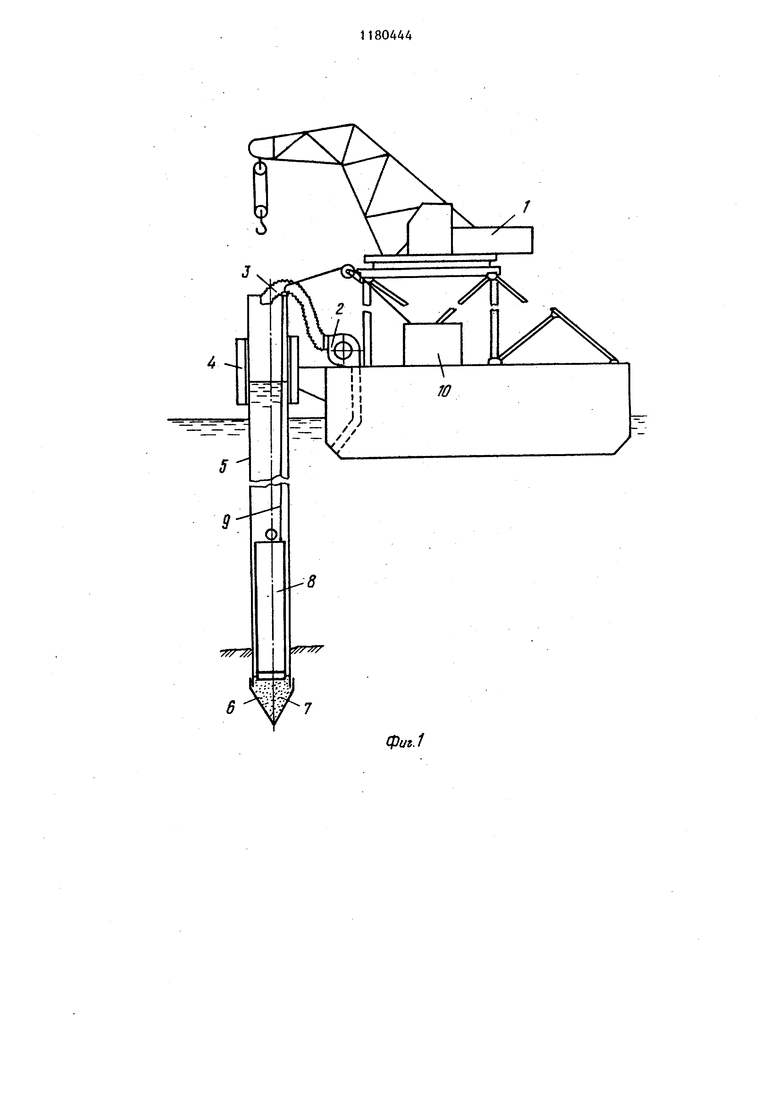
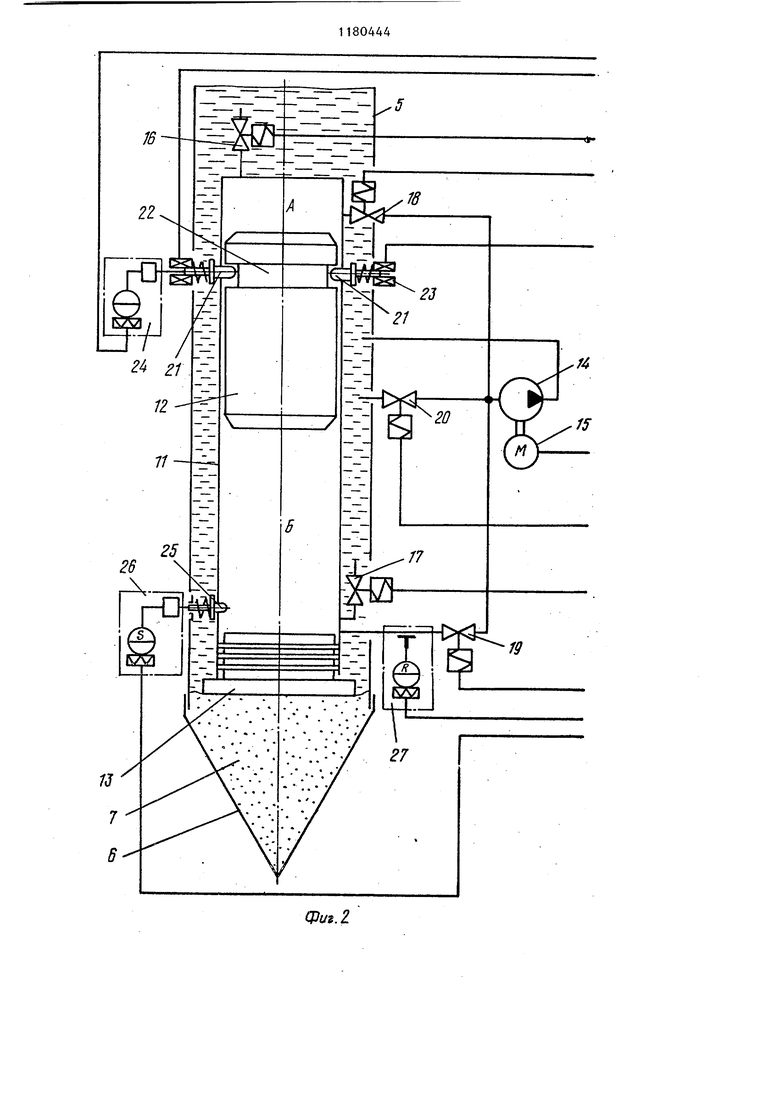
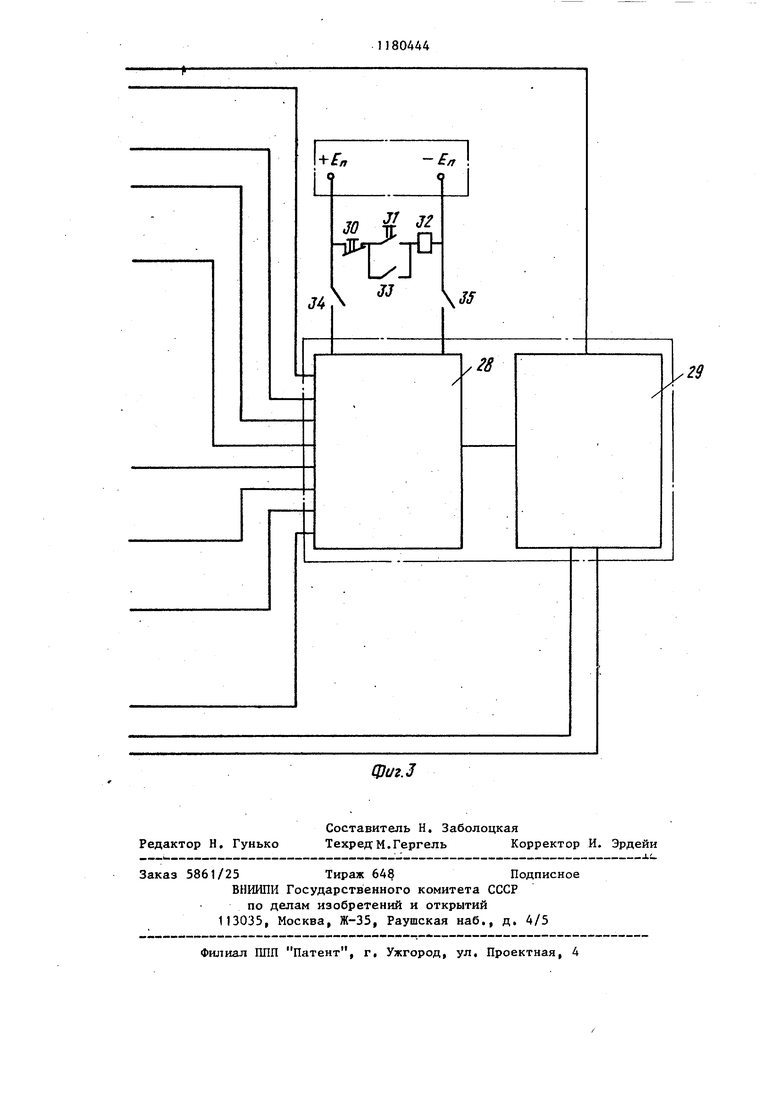
4 t 4; Изобретение относится к строител ству фундаментов и оснований, возводимых в прибрежной зоне, а именно к устройствам для забивки с плавсредств свай трубного сечения в дно водоема. Цель изобретения - повьоиение эффективности забивки свай на больших глубинах и надежности устройства. На фиг. 1 изображена общая схема устройства; на фиг, 2 - принципи альная схема ударного рабочего органа; на фиг, 3 - электрическая система управления. Устройство для забивки трубных свай в дно водоема содержит базовую грузоподъемную машину 1 на плаву, снабженную насосом 2 с гибким напор ным шлаР1гом 3 и направляющей 4 для удержания трубной сваи 5 с наконечНИКОМ 6 в заданном (вертикальном или наютонном) положении, Б свае у наконечника 6 на гравийно-песчаной подушке 7 расположен ударный рабочи орган 8, соединенный кабелем 9с выносной системой 10 управления, которая установлена на базовой маши не 1 , Ударный рабочий орган 8 включает цилиндр 11 с поршнем-бойком 12, шабот 13, установленный на нижнем тор це цилиндра, насос 14 с приводным электродвигателем 15. Поршень-боек делит внутреннюю полость цилиндра 1 на верхнюю А и нижнюю Б рабочие полости, снабженные нормально откры тым 16 и нормально закрытым 17 клапанами с электромагнитным приводом. Электрически управляемые нормально закрытые клапаны 18 и 19 связывают полости А и Б с входом насоса 14, снабженным нормально закрытым элект ромагнитным клапаном 20. В верхней части цилиндра (полост А) смонтировано устройство для фиксирования крайнего верхнего положе.нкя поршня-бойка, которое содержит подпружиненные штоки 21, входящие в кольцевую проточку 22, выполненную на наружной поверхности поршня-бойка, и электромагниты 23, Один из штоков 21 связан с электрическим датчиком 24 положения. В нижней час цилиндра смонтировано устройство дл фиксирования нижнего положения порш бойка, состоящее из подпружиненного штока 25, связанного с датчиком 26 положения. В магистрали, соединяющей полость Б цилиндра с входом насоса 14, перед клапаном 19 установлен бесконтактный электрический датчик 27 давления. Электрическая система управления содержит силовой 28 и управляющий 29 блоки, соединенные с источником питания постоянного тока Е, и пусковое устройство, включающее кнопки 30 и 31, магнитный контактор 32 с контактами 33 - 35. Силовой блок 28 соединен питающими силовыми магистралями с электродвигателем 15, обмотками электромагнитов .23 и электромагнитных клапанов 16-20 ударного рабочего органа (фиг, 2), датчики которого 24, 26 и 27 соединены с управляющим блоком 29, В нерабочем состоянии ударного рабочего органа (фиг, 2) его поршень-. боек 12 находится в нижнем положении и опирается на шабот 13. Катушки электромагнитов 23 и обмотки электромагнитных клапанов 16-20 обесточены. Устройство для забивки трубных свай в дно водоема работает следующим образом,. После установки сваи 5 в вертикальное положение, отсыпки гравийно-песчаной подушки 7 и установки на нее ударного рабочего органа8 насосом 2 посредством гибкого шланга 3 производят закачку воды внутрь сваи (фиг, 1), При этом полость А цилиндра 11 ударного рабочего органа через клапан 16 заполняется водой (фиг. 2), Закачку воды в сваю 5 осуществляют до уровня, при котором давление водяного столба в нижней части сваи станет достаточным для перемещения в верхнее положение поршня-бойка 12 ударного рабочего органа, в случае открытия клапана 17 при одновременном опорожнении полости А, I По завершении закачки насос 2 (фиг, 1) выключается и включается электрическая система управления (фиг, 3) путем нажатия кнопки 31, в результате чего замыкаются контакты 33 - 35 магнитного контактора 32, Силовой блок 28 соединяется с источником питания Е J, и подает напряжение на двига.тель 15 и обмотки электромагнитных клапанов 16 - 18, При этом включается насос 14, закрывается клапан 16 и открываются клапаны 17 и 18. Полость А цилиндра 11 соединяется с входом насоса 14, который 3 выкачивает из нее воду в полость сваи, В полость Б цилиндра 11 из полости сваи через клапан 17- начнёт поступать вода, под давлением которой поршень-блок 12 устремится ввер в сторону опорожняемой полости А, По истечении некоторого времени поршень-боек 12 верхним торцом, сна женным фаской, раздвигает штоки 21 устройства для фиксирования крайнего верхнего положения поршня-бойка. В следующий момент времени штоки 21 совмещаются с проточкой 22 в поршне бойке. Под действием пружин штоки 2 перемещаются в исходное положение (внутрь цилиндра 11) и поршень- боек 12 зафиксируется в верхнем положени При раздвигании штоков 21 поршнем-бойком 12 в датчике 24 положени наводится сигнал, поступающий па управляющий блок 29 электрической системы управления (фиг, 3), по команде которого силовой блок 28 пода напряжение на обмотки электромагнит ного клапана 19 и одновременно обес точивает обмотки электромагнитных клапанов 16 - 18, Клапаны 19 и 16 открываются, а клапаны 17 и 18 закр ваются. Таким образом, насос 14 отсекается от полости А цилиндра 11 и присоединяется к его полости Б, откуда выкачивает воду в полость сваи. Полость А цилиндра заполняется водой из полости сваи через нормально открытый клапан 16. При достижении в полости Б давления, соответствующего моменту ее опорожнения, датчиком 27 давления генерируется сигнал, поступающий на управляющий блок 29 электрическо системы управления. По этому сигналу блок 29 вырабатьшает команду, по которой силовой блок 28 подает питание на электромагниты 23, обмот ку электромагнитного клапана 20 и о ключает обмотку электромагнитного клапана 19 (фиг 2), Электромагниты 23 втягивают штоки 21, которые осво бождают поршень-боек .12, одновременно открьшается клапан20 и закры вается клапан 19, Под действием собственного веса и давления поступающей через клап-ан 16 в полость А цилиндра 11 воды, поршень-боек 12 устремляется вниз, совершая рабочий ходс При этом насос 14, вход которого сообщен через открытый 44 клапан 20 с полостью сваи, работает на себя, В момент времени, непосредственно предшествующий удару, движущийся вниз поршень-боек 12 смещает шток . 25 устройства для фиксирования нтанего положения поршня-бойка за пределы рабочего объема цилиндра 11, после чего наносит удар по шаботу 13, реализуя погружение сваи 5 в донный грунт. Сигнал датчика 26 положения, генерируемый при перемещении штока 25, подается на управпяюш й блок 29 электрической системы управления (фиг, 3), Управляющий блок 29 вырабатывает команду, по которой силовой блок 28 подает питание в обмотки электромагнитных клапанов 16 - 18 и обесточивает электромагниты 23 и обмотки электромагнитного клапана 20 (фиг, 2), Штоки 21 возвратными пружинами устанавливаются в исходное положение. Клапаны 16 и 20 закрываются, а клапаны 17 и 18 открываются, В результате полость А цилиндра 11 отсекается от полости сваи 5 и присоединяется к входу насоса 14, который откачивает из нее воду. Под давлением воды, поступающей через клапан 17 в полость Б цилиндра 1 1, поршень-боек 12 начнет перемещаться вверх, совершаяя холостой ход. При этом поршень-боек освободит шток 25, который возвратной пружиной устанавливается в исходное положение. С этого момента описанный процесс периодически повторяется в автоматическом режиме, Выключение ударного рабочего органа 8 устройства осуществляется нажатнем кнопки 30 электрической системы управления (фиг, 3), в результате чего размыкаются контакты 33 - 35 магнитного контактора 32 и все электрические цепи устройства обесточиваются. Наличие управляемых с помощью бесконтактных датчиков положения и давления клапанов и насоса позволяет реализовать возвратно-поступательное движение поршня-бойка ударного рабочего органа в автоматическом , используя в качестве энергоносителя воду, заполняющую полость сваи. Присоединение массы воды, поступающей под давлением в полость А цилиндра рабочего органа, к массе совершающего рабочий ход поршня-бойка способствует увеличению и myльca удара,
о
да JI 3
Vl
J4
с
L/J
XJ/
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМОЛОТ | 2008 |
|
RU2383684C1 |
| Ударное устройство | 1988 |
|
SU1618840A1 |
| ЭЛЕКТРОМОЛОТ | 2008 |
|
RU2381330C1 |
| Свайный молот | 1991 |
|
SU1794135A3 |
| ЭЛЕКТРОМОЛОТ | 2004 |
|
RU2282029C2 |
| Устройство для забивки свай | 1989 |
|
SU1701829A1 |
| ГИДРАВЛИЧЕСКИЙ МОЛОТ ДЛЯ ПОГРУЖЕНИЯ СВАЙ | 2007 |
|
RU2347037C2 |
| ЭЛЕКТРОМОЛОТ | 2005 |
|
RU2315181C2 |
| МОЛОТ СВАЕБОЙНЫЙ ГИДРАВЛИЧЕСКИЙ | 2001 |
|
RU2184811C1 |
| Устройство для забивки и выбивки клиньев штамповочных и ковочных молотов | 1975 |
|
SU539661A1 |
УСТРОЙСТВО ДЛЯ ЗАБИВКИ ТРУБ.НЫХ СВАЙ В ДНО ВОДОЕМА, содержащее установленный в полости трубной сваи рабочий цилиндр с поршнем-бойком и шаботом, насос, гидравлические магистрали, сообщающие насос с рабочим цилиндром, и клапаны с системой управления, отлича-ющееся тем, что, с целью повышения эффективности забивки свай на больших глубинах и надежности устройства, рабочий цилиндр сообщен с внутренней полостью трубной сваи и с всасывающей магистралью насоса клапанами, управляемыми при помощи установленных в верхней и нижней частях рабочего цилиндра датчиков положения поршня-бойка и датчика.давления, подключенных к системе управления. (Л
29
/
/
| Устройство для погружения свай в грунт | 1972 |
|
SU528372A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ СБОРКИ ШЛАНГОВ ИЛИ ТРУБОК С ИХ КОНЦЕВОЙ АРМАТУРОЙ | 1991 |
|
RU2022755C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
