/яи:и
3
У8
fUJ
00
о со ;о
УВ
Риг.1
Изобретение относится к горной промышленности и предназначено для управления очистными агрегатами в профиле пласта.
Цель изобретения - повышение точности управления при неспокойной гипсометрии пласта с использованием ручного или автоматического управления.
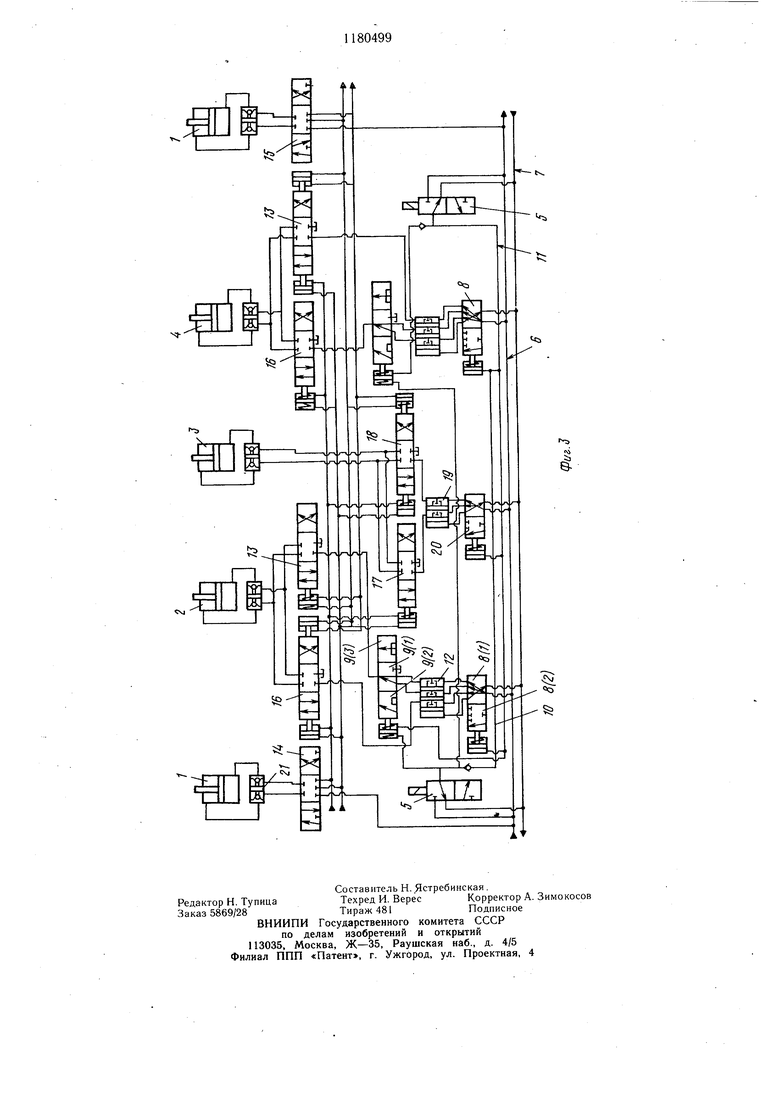
На фиг. 1 показаны взаимосвязанные группы гидроцилиндров и схема ввода управляющего воздействия в гидрораспределители гидроцилиндров управления; на фиг. 2- возможные положения штоков гидроцилиндров одной группы; на фиг. 3 - гидравлическая схема устройства управления движением выемочного агрегата в. профиле пласта.
Устройство содержит группы гидроцилиндров, состоящие из гидроцилиндра 1 управления и вспомогательных гидроцилиндров 2-4 (фиг. 1-3). Гидроцилиндры 1 управления снабжены датчиками слежения за гипсометрией пласта, электрически соединенными с гидрораспределителями 5, которые подключают напорную 6 и сливную 7 гидролинии к гидрораспределителям 8 и 9 с помощью гидролиний 10 и 11 управления. Гидрораспределители 8 и 9 соединены один с другим через трехпозиционный объемный дозатор 12. Гидрораспределители 9 соединены с гидроцилиндрами 2 и 4 через гидрораспреЛелители 13. Гидрораспределители 14 и 15 гидравлически связаны с гидроцилиндрами
1и с системой управления гидрораспределителями 13 и 16 гидроцилиндров 2 и 4. Гидроцилиндр 3 через гидрораспределители 17 и 18, двухпозиционный объемный дозатор 19 и гидрораспределитель 20 связан с напорной 6 и сливной 7 гидролиниями. Каждый гидроцилиндр снабжен гидрозамками 21.
Устройство работает следующим образом.
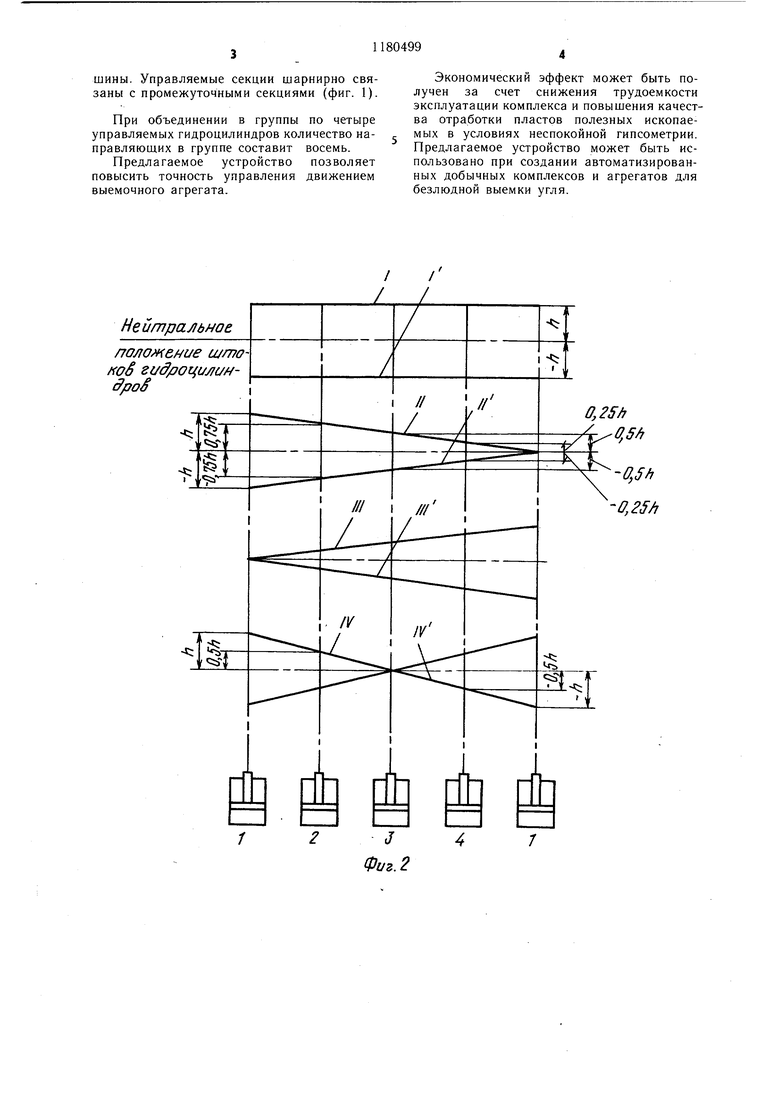
На фиг. 2 показаны восемь различных положений штоков гидроцилиндров одной группы (I-IV). При этом гидроцилиндры
2и 4 должны иметь восемь различных по величине и по направлению рабочих ходов порщня (а именно, ±/г, ±0,75h ,5h, ±0,25h, где h - максимальный ход порщней гидроцилиндров 1), а гидроцилиндр 3 должен иметь четыре значения рабочих ходов (dzh, ±0,5h и нейтральное положение). Каждому варианту сигналов датчиков слежения за гипсометрией пласта, которыми снабжены гидроцилиндры 1 управления, соответствует однозначная комбинация положения вспомогательных гидроцилиндров группы.
При отсутствии сигналов датчиков гидрораспределители 8 и 20 установлены так (позиция 8(1), что рабочая жидкость поступает в рабочие полости дозаторов 12 и 19 на нагнетательной гидролинии 6, а из полости уп-, равления - в сливную гидролинию 7. Происходит зарядка объемных дозаторов. При срабатывании датчиков рабочая жидкость
через гидрораспределители 5 поступает по гидролиниям 10 и 11 в систему управления гидрораспределителями 8, 9 и 20. Гидрораспределители 8 и 20 устанавливаются во вторую позицию (позиция 8(2) и происходит дозированная (из дозаторов 12 и 19) подача рабочей жидкости в гидроцилиндры 2-4.
При одновременном срабатывании обоих датчиков (положения I и I направляющей, фиг. 2) гидрораспределитель 9 устанавливается в позицию 9(1) и к гидроцилиндрам 2 и 4 поступает количество рабочей жидкости, обеспечивающее рабочий ход, равный h. Гидрораспределители 17 и 18 складывают обе позиции дозатора 19 и подают рабочую жидкость к гидроцилиндру 3.
При срабатывании одного из датчиков гидрораспределитель 9 занимает позицию 9(2) или 9(3) обеспечивая при этом гидроцилиндрам 2 и 3 рабочие ходы, равные 0,25h или 0,75Ь (фиг. 1, положения II и И III и III). При этом срабатывает гидрораспределитель 17 и щток гидроцилиндра 3 перемещается на величину 0,5h.
Для получения положений IV и IV направляющей (фиг. 2) гидроцилиндры 2 и 4 должны иметь рабочий ход, равный 0,5h. Для этого гидрораспределители 16 устанавливаются в одну из крайних позиций, реагируя на сигналы гидрораспределителей 14 и 15, управляемых датчиками. Гидрораспределители 13,17 и 18 установлены в нейтральную позицию.
Предлагаемое устройство управления движением выемочного агрегата в профиле пласта полезного ископаемого повышает точность процесса управления вследствие значительного расширения диапазона возможных положений направляющей выемочного агрегата в зависимости от сигналов датчиков слежения за гипсометрией пласта. Известные системы автоматического управления движением выемочного агрегата характеризуются тем, что каждый гидроцилиндр управления положением направляющей для движения исполнительного органа управляется от датчика слежения за гипсометрией почвы или кровли пласта полезного ископаемого. Это приводит к усложнению автоматического управления вследствие большого числа гидроцилиндров управления, отрабатывающих управляющее воздействие.
Для упрощения процесса управления необходимо уменьшить количество гидрораспределителей, на которые подаются команды управления. Для этого гидроцилиндры объединены в группы по четыре, причем каждая группа (фиг. 1) управляется от гидрораспределителея с одним внешним входом. Каждый гидроцилиндр связан с управляемой секцией направляющих для движения выемочной машины. Управляемые секции шарнирно связаны с промежуточными секциями (фиг. 1).
При объединении в группы по четыре управляемых гидроцилиндров количество направляющих в группе составит восемь.
Предлагаемое устройство позволяет повысить точность управления движением выемочного агрегата.
Экономический эффект может быть получен за счет снижения трудоемкости эксплуатации комплекса и повышения качества отработки пластов полезных ископаемых в условиях неспокойной гипсометрии. Предлагаемое устройство может быть использовано при создании автоматизированных добычных комплексов и агрегатов для безлюдной выемки угля.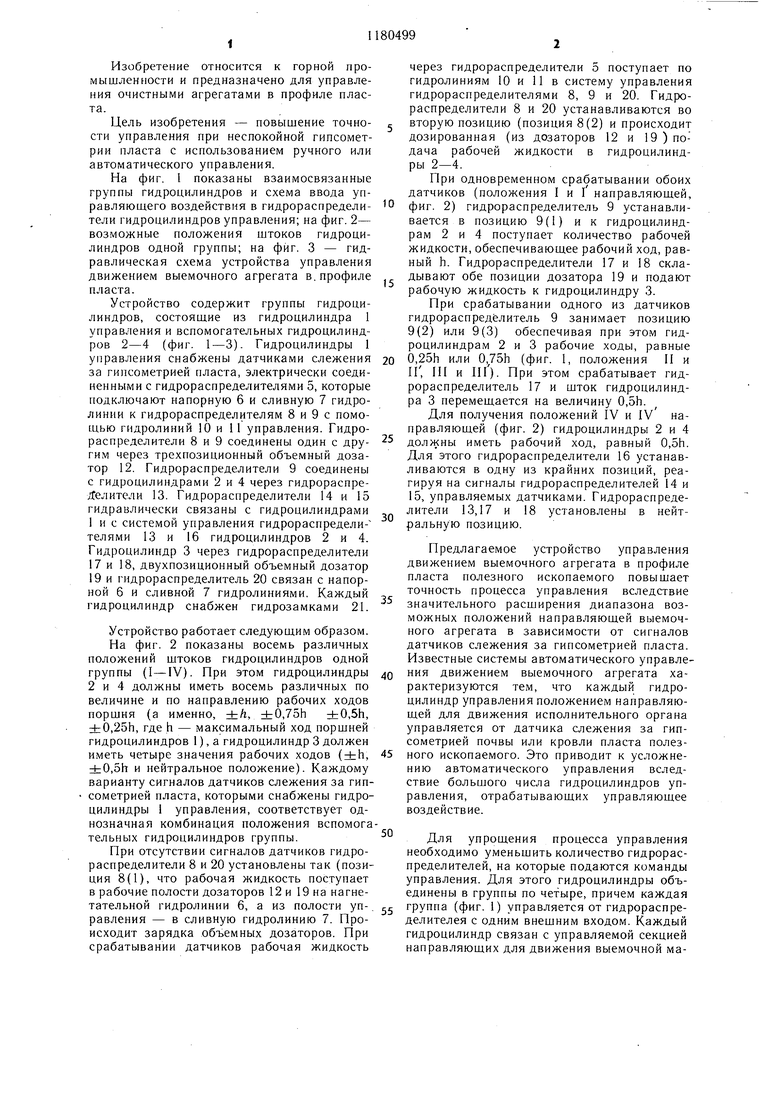
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением выемочного комплекса в плоскости пласта | 1979 |
|
SU881314A1 |
| Гидросистема управления секциями крепи | 1986 |
|
SU1472691A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ФРОНТАЛЬНОГО АГРЕГАТА | 2003 |
|
RU2246615C1 |
| Устройство для автоматического поддержания прямолинейности базовой балки | 1980 |
|
SU877060A1 |
| Гидравлическая система управления поворотом гусеничной машины | 1983 |
|
SU1134455A1 |
| Гидравлическая система рулевого управления транспортного средства | 1982 |
|
SU1134451A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ДЛИННОМЕРНОГО ПРОКАТА В ЗОНУ ОБРАБОТКИ | 1994 |
|
RU2104115C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ФРОНТАЛЬНОГО АГРЕГАТА | 2005 |
|
RU2282719C1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА НА ГУСЕНИЧНОМ ХОДУ | 2013 |
|
RU2531425C2 |
| Способ регулирования уровня резания добычного струга и устройство для его осуществления | 1989 |
|
SU1713441A3 |
УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ВЫЕМОЧНОГО АГРЕГАТА ПО ГИПСОМЕТРИИ УГОЛЬНОГО ПЛАСТА, содержащее гидроцилиндры управления, объединенные в группы. гидрорасп| делители, гидрозамки, напорную и сливную гидролинии, отличающееся тем, что, с целью повышения точности управления, каждая группа снабжена двухпозиционным и трехпозиционными объемными дозаторами и образована основным гидроцилиндром управления и тремя вспомогательными гидроцилиндрами управления, средний из которых связан с двухпозиционным объемным дозатором, а каждый из крайних - с трехпозиционным дозатором, при этом основной гидроцилиндр управления и вспомогательные гидроцилиндры управления связаны через гидрораспределители с напорной и сливной гидролиниями, а группы между собой связаны через гидрораспределители гидроцилиндров управления. S (Л
Нейтральное
положение шшоffoS е1/ /}оци /ин /joS
Jh db db ri
/2347
Фиг. 2
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ ПО ГИПСОМЕТРИИ ПОЧВЫ ПЛАСТА ВЫЕМОЧНЫХ МАШИН | 0 |
|
SU269881A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство управления движением выемочного агрегата по гипсометрии угольного пласта | 1979 |
|
SU878932A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
