1
Изобретение относится к горной прокышленности, а именно к устройству для автоматического поддержания прямолинейности базовой балки, и может найти применение при создании автоматизированных добычных комплексов и агрегатов для безлюдной выемки угля.,
Известно устройство управления движением выемочного агрегата в плоскости пласта, включающее гидроцилинд ал подачи гид15оцилиндры продольного перемещения, управляемые гидрораспределители, гидроз амки, подключенные через обратные клапаиы к гидрораспределителям/ соседним управляемым секциям 1 .
Йедостатком рас 3мотренного- устройств является то, что,управление осу дествляется путем многократной подачи оператором управляющих сигналов по всей длине лавы.
Наиболее близким к предлагаемому является устройство для автоматического поддержания прямолинейности базовой балки, включающее гидроцилиндры опоры и подачи, связанных с секциями крепи и базы, гидрозамки, гидрораспределители и дозаторы, ус7
тановленные в напорных и сливных гидролиниях 2 .
Недостатком указанного устройства является то, что невозможно автоматически осуществить разворот агрегата на определенный угол. Кроме того, синхронность движения обеспечивается за счет равенства .порций рабочей жидкости, вытесняемой
10 из одного дозатора в другой. Различие по величине утечек дозаторов и технологические погрешности в изготовлении их активной части снижает качество синхронизации.
15
Цель изобретения - повышение точности и упрощение процесса управле.ния.
Поставленная цель достигается.
20 за счет того, что устройство для автоматического поддержания прямолинейности базовой балки содержит гидроцилиндры опоры и подачи, гидрозамки, гидрораспределители и
25 дозаторы, установленные в напорных и сливных гидролиниях, при этом опорные гидроцилиндры расположены между гидроцилиндрами подачи и попарно параллельно связаны между собой, образуя группу и через гидроаспределитель и дозаторы соединены о сливной и напорной гидролиниями. Дозаторы .выполнены в виде регуируемых, установленных на общем валу объемных гидромаиин, одна из которых выполнена в виде гидромотора и связана через гидрораспредеитель с крайним гидроцилиндром поачи,установленным перед последуюей ГРУППОЙ.
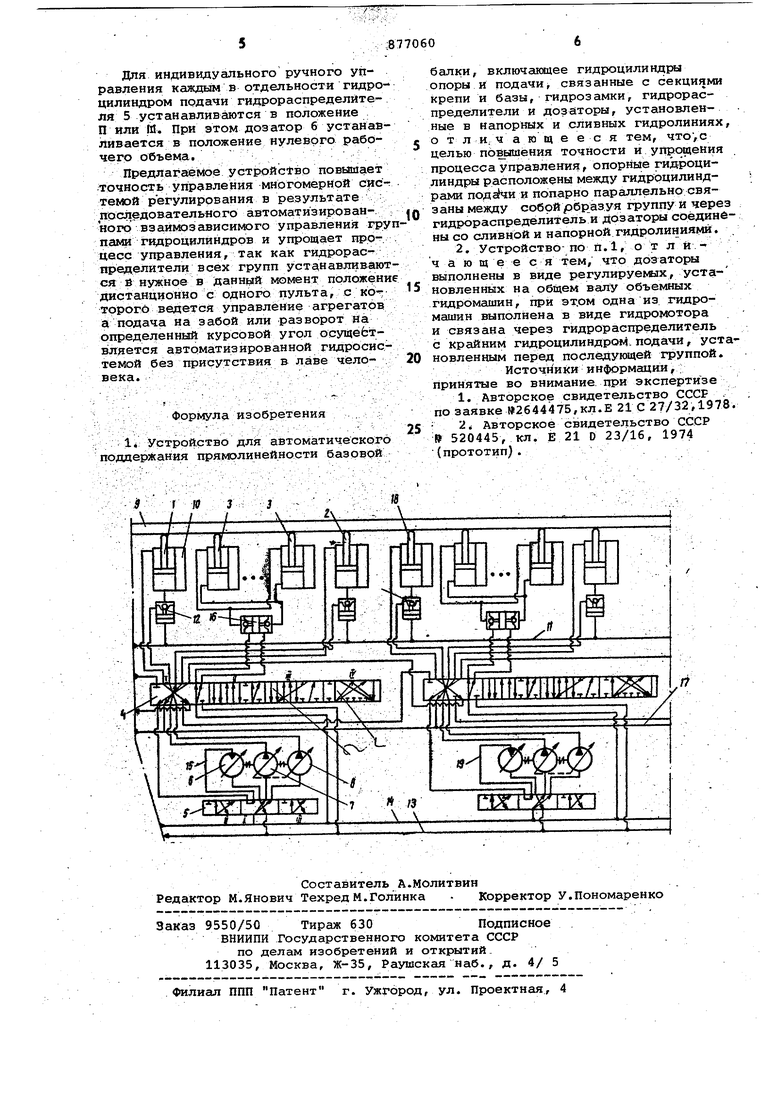
На чертеже изображена гидравлическая схема устройства для автоматического поддержания йрямолинейности базовой балки.,
Гидросхема устройства состоит из групп (на чертеже показаны две группы) , включающих два (или несколько) гидроцилйидра 1 и 2 подачи, расположенные между ними опорные гидррциЛинйры 3 f гидрораспределители 4 и 5 и дозаторы 6,7 и 8. Все гидроцилиндры штоками шарнирно соединены с дос- . Таточно жесткой базой 9 выемочного агрегата, ё. корпусом - с секцией Йрепи 10, Гидроцилиндры 1 и 2 подачи снабжены односторонними управляекыми Через гидролинию 11 гидрозамками 12 и соединены:со сливной 13 и нагнетательной 14 гидролиниями через гидрораспределитель 4, дозаторы 7 и 8, количество которых соответствует кЬли есзтву гидроцилиндров П9дачи в группе, и гйдрораспрёделитель 5. Дозаторы 7 и В, работающие в насосном режиме, расположены на; одном валу с дозатором б, работающим в моторном режиме и соединенным гидролинией 15 через гидрораспределитель 5 или с гидролинией 14 нагнетателя (положеннё П и Ш гидрораспределителя 5 Или . через гидрораспределитель 4 с гидроцйлиндром йодачи группы, предшествунмцей данной по управляквдему сигналу (положение 1) гидрораспределитёля 4. ДЬзаторы 6,7 к 8 выполнены В виде объемн.ых регулируемлх гидромашин. Опорные гидроцилиндры 3 снабжены гидрозамками 16. Гидролинии 11, 13,14 и 1,7 связаны с пультом управления, расположенным На насосной станции.
. ,. . . # .
УстройсФво работает слеяукячим образом.
Вмлючение гидросистеи производится на общем пульте управления на насосной станции. При этом по гидролиняям 11 И 14 поступает рабочая жид крсть под давлением. Отк1Я:1ваются гифюзамки 12. Гидролинии 13 и 17 сливные. Для получения автоматического режима работы все гидрораспредёлители 5 устанавливаются с общего пульта управления дистанционно в положение 1. При этом дозаторы 7 и 8 соединяются с гидролинией нагнетания 14. При развороте агрегата на определенный курсовой угол дистанционно устанавливают гидрораспределители 4 в положение, например,1. Величина курсового угла обеспечив ается определенным соотношением рабочих объемов дозаторов 7 и 8, которое устанавливается также дистанционно. Рабочая жидкость по гидролинии 15 :через гидрораспределители 4 и 5 поступает К дозатору б из штоковой полости гидр.оцилиндра 18 подачи группы, предшествующей данной по управля1ш1емУ сигналу. Дозатор 6 вращает дозаторы 7 и 8, подающие рабочую жидкость пси давле-. .нием в определенной пропорции к Поршневым полостям гидроцилиндров 1 и 2 подачи, столько времени, сколько перемещается гидроцилиндр 18 подачи. При этом происходит разворот баз выемочного агрегата на определенный, заранее заданный, курсовой угол. Сли гидроцилиндра 1 подачи соединен через гидрораспределитепь 4 с дозатором 19 последукщей .группы, работающим в моторном режиме. Рабочая жидкость из штоковой полости гидроцилиндра 2 подачи идет на слив в гидролинию 17. Опорные гидроцилиндры 3, соединенные параллельно между собой через гидрозамок 16 и гидрораспределитель 4 с гидролинией 14, благодаря жесткости базы 9 занимают новые -положения, определеннЁае гидроцилиндрами 1 и 2 подачи этой группы. При снятии управлянядего сигнала гидрозамки 12 и 16 фиксируют гидроцилиндры в их новом положении. Разворот ры в их новом положении. Разворот выемочного агрегата в другую сторону производится аналогичным образом при установке гйдрораспределителей 4 в положение П. .
Для подачи базы 9 на забой гидрОраспределители 4 устанавливают в положение Ш. При этом дозаторы 7 и 8 каждой группы имеют одинаковые объемы. Рабочая жидкость посTyriaef в поршневые полости гидроцилиндров. Из штоковых полостей гидроцилиндров рабочая жидкость идет на слив, кроме гидроцилиндра 2 - . подачи, рабочая жидкость со слива которого поступает в дозатор последующей группы, работающий в моторном режиме.
Для подтягивания секций крепи к базе 9 гидрораспределители 4 устанавливают в положение IV, дозаторы 6,7 и 8 отключают, устанавливая нулевой рабочий объем, по гидролинии 17 подается рабочая жидкость под давлением, из которой она подается в штоковые полости всех гидроиилиндров одновременно. Из поршневых полостей гияроиилиндров рабочая жидкость поступает на слив. В процессе подтягивания секций крепи устраняется ошибка, накопленная при управлении из-за утечек жидкости, так как при этом вся система полностью заполняется рабочей жидкостью. Для индивидуального ручного управления каждым в отдельности гидро цилиндром подачи гидрораспределйтеля 5 устанавливаются в положение П или Ш. При этом доз атор 6 устанав ливается в положение нулевого рабочего объема.; : Предлагае1мое устройс во повышает точность управления многомерной системой регулирования в результате последовательного автоматизированногр взаимозависимого управления гру пами гидроцилиндров и упрощает процесс управления, так как гидрораспределители всех групп Уста,навливают ся и нужное в данний момент положени дистанционно с одного пульта, с котррого ведется управление агрегатов а подача на забрй или разворот Hia определенный курсовой угол осущеЬтвляется автоматизированной гидросистемой без присутствия в лаве человека. : . : ; -, . , ,.-. ./,:/, Формулу изобретения .л 1 Устройство для автоматического поддержания прякюлинейности базовой балки, включакяцее гидроцилиндры опоры и подачи, связанные с секциями крепи и базы, гидрозамки, гидрораспределители и дозаторы, установленные в напорных и сливных гидролиниях, о т л и. ч а го щ е е с я тем, чтоус целью повышения точности и уПроЕцения процесса управления t опорные гидроцилиндры расположены между гидррцилиндрами и попарно параллельно связанымежду собой группу и через гидрораспределитель и дозаторы соёдинбны со сливной и напорной гидролиниями. , 2, Устройство-по п.1, о т л и ч а ю щ ее с я тем, что дозаторы выполнены в виде регулируеьвдх, установ ленных на общем валу объемных гидромашин, при эт.ом одна из гидромашин выполнена в виде гидромотора и связана через гидрораспределитель с крайним гидроцилиндром.подачи, установленным перед последующей группой. Источники информации,; принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке №2644475,кл.Е 21 С 27/32Д978. 2. Авторское свидетельство СССР № 520445, кл. Е 21 D 23/16, 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления базой очистного агрегата в профиле пласта | 1986 |
|
SU1425344A1 |
| Устройство управления движением выемочного агрегата по гипсометрии угольного пласта | 1982 |
|
SU1180499A1 |
| Устройство управления движением выемочного агрегата в плоскости пласта | 1985 |
|
SU1254168A1 |
| Устройство управления базой очистного агрегата в профиле пласта | 1986 |
|
SU1404647A1 |
| Система непрерывной передвижки базы агрегата | 1991 |
|
SU1809101A1 |
| Устройство управления базой выемочной машины | 1986 |
|
SU1442651A1 |
| Гидросистема управления механизированной крепью | 1980 |
|
SU949198A1 |
| Устройство для управления движением выемочного комплекса в плоскости пласта | 1979 |
|
SU881314A1 |
| Устройство для передвижки стругового механизированного комплекса | 1988 |
|
SU1765451A1 |
| ГИДРОПРИВОД ПЕРЕКРЫТИЯ СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2000 |
|
RU2165529C1 |
