f VJ Л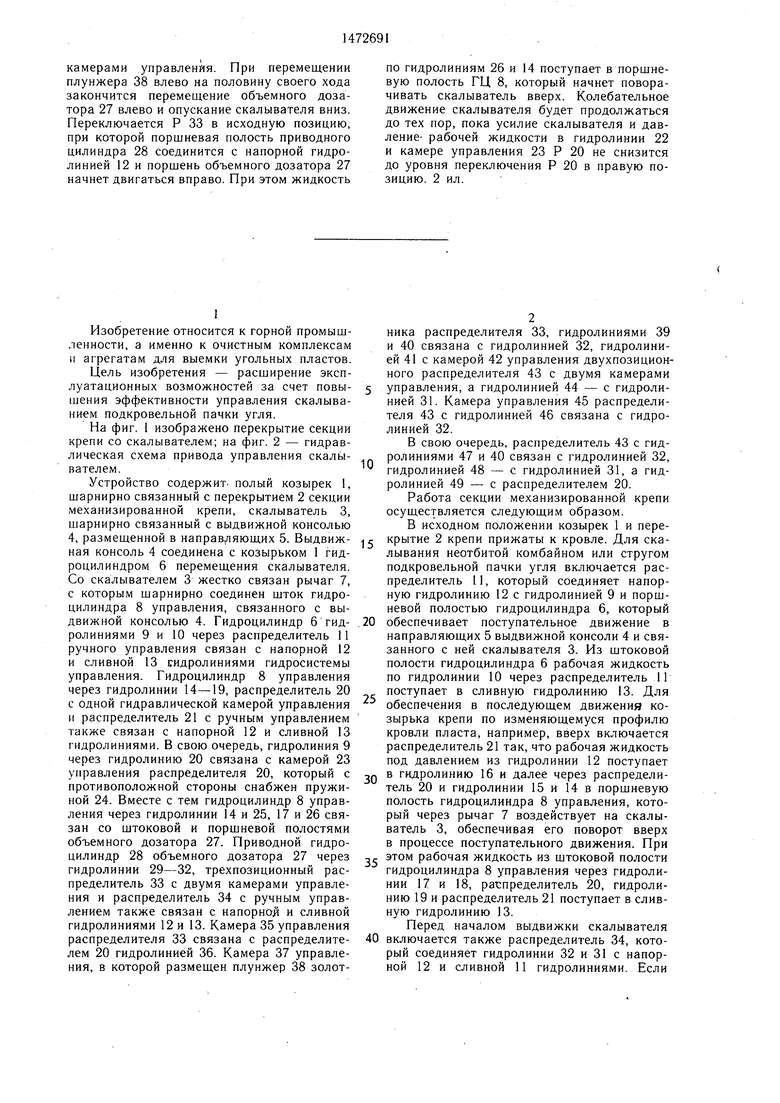
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидросистема секции механизированной крепи | 1988 |
|
SU1587211A1 |
| Гидросистема секции механизированной крепи | 1987 |
|
SU1469173A1 |
| Секция механизированной крепи | 1985 |
|
SU1301984A1 |
| Гидропривод шагового толкателя | 1987 |
|
SU1523746A1 |
| Гидропривод стрелы экскаватора | 1989 |
|
SU1661479A1 |
| ГИДРОПРИВОД ПЕРЕКРЫТИЯ СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2000 |
|
RU2165529C1 |
| Гидравлический синхронный механизм зажима | 1985 |
|
SU1284769A1 |
| Гидропривод | 1983 |
|
SU1071826A1 |
| Устройство для ввода пермутационных кассет в стенки скважины | 1987 |
|
SU1548341A1 |
| ГИДРОПРИВОД СВАЙНОГО ОБОРУДОВАНИЯ ЗЕМСНАРЯДА | 1993 |
|
RU2065009C1 |

Изобретение относится к горной промышленности, а именно к очистным комплексам и агрегатам для выемки угольных пластов. Цель - расширение эксплуатационных возможностей за счет повышения эффективности управления скалыванием подкровельной пачки угля. Гидросистема управления секциями крепи включает расположенные на перекрытии секции гидроцилиндры (ГЦ) 6 перемещения перекрытия и ГЦ 8 управления со штоковыми и поршневыми полостями. С напорной и сливной магистралями и с полостями ГЦ 6 и 8 соединены дополнительно распределители (Р) 11, 21, 31 и двухпозиционный Р 20 с одной камерой гидроуправления 23. Система включает трехпозиционный Р 33 и двухпозиционный Р 43, каждый из которых имеет две камеры гидроуправления. Объемный дозатор 27 выполнен со штоковой полостью и поршневыми полостями большего и меньшего диаметров. Поршневая полость ГЦ 6 соединена с камерой управления Р 20. Один выход Р 20 сообщен с поршневой полостью ГЦ 8 и поршневой полостью меньшего диаметра дозатора 27, другой выход - со штоковой полостью ГЦ 8 и штоковой полостью дозатора 27. Поршневая полость большего диаметра дозатора 27 соединена с Р 31 через трехпозиционный Р 33 с камерами 35 и 37 управления. Канал управления камерой 35 сообщен через Р 21 со сливной гидролинией 13. Канал управления одной из камер Р 43 сообщен с Р 34 ручного управления и другой его камерой управления 42 через другую камеру управления 37 трехпозиционного Р 33 с двумя камерами управлени я. При перемещении плунжера 38 влево на половину своего хода закончится перемещение объемного дозатора 27 влево и опускание скалывателя вниз. Переключается Р 33 в исходную позицию, при которой поршневая полость приводного цилиндра 28 соединится с напорной гидролинией 12, и поршень объемного дозатора 27 начнет двигаться вправо. При этом жидкость по гидролиниям 26 и 14 поступает в поршневую полость ГЦ 8, который начнет поворачивать скалыватель вверх. Колебательное движение скалывателя будет продолжаться до тех пор, пока усилие скалывания и давление рабочей жидкости в гидролинии 22 и камере управления 23 Р 20 не снизится до уровня переключения Р 20 в правую позицию. 2 ил.
12
фиг.г
/J
камерами управления. При перемещении плунжера 38 влево на половину своего хода закончится перемещение объемного дозатора 27 влево и опускание скалывателя вниз. Переключается Р 33 в исходную позицию, при которой порщневая полость приводного цилиндра 28 соединится с напорной гидролинией 12 и поршень объемного дозатора 27 начнет двигаться вправо. При этом жидкость
1
Изобретение относится к горной промышленности, а именно к очистным комплексам И агрегатам для выемки угольных пластов.
Цель изобретения - расширение эксплуатационных возможностей за счет повышения эффективности управления скалыванием подкровельной пачки угля.
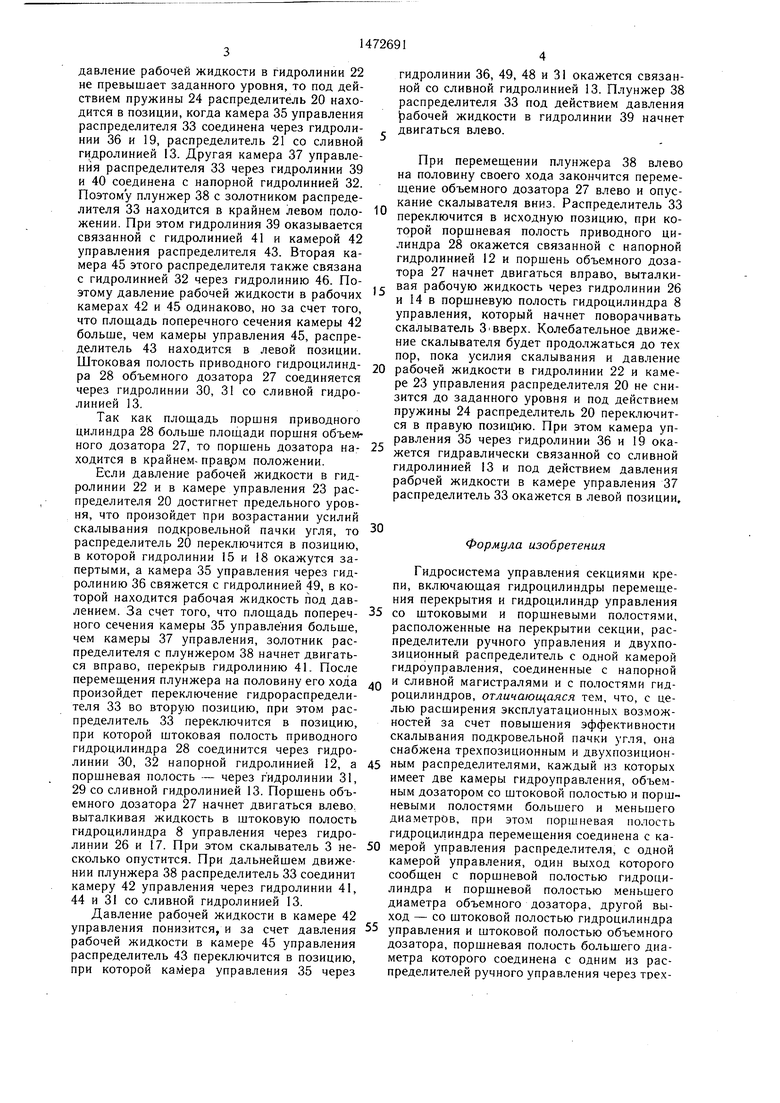
На фиг. 1 изображено перекрытие секции крепи со скалывателем; на фиг. 2 - гидравлическая схема привода управления скаль - вателем.
Устройство содержит полый козырек 1, шарнирно связанный с перекрытием 2 секции механизированной крепи, скалыватель 3, шарнирно связанный с выдвижной консолью 4, размещенной в направляющих 5. Выдвижная консоль 4 соединена с козырьком 1 гидроцилиндром 6 перемещения скалывателя. Со скалывателем 3 жестко связан рычаг 7, с которым щарнирно соединен щток гидроцилиндра 8 управления, связанного с выдвижной консолью 4. Гидроцилиндр 6 гидролиниями 9 и 10 через распределитель 11 ручного управления связан с напорной 12 и сливной 13 сидролиниями гидросистемы управления. Гидроцилиндр 8 управления через гидролинии 14-19, распределитель 20 с одной гидравлической камерой управления и распределитель 21 с ручным управлением также связан с напорной 12 и сливной 13 гидролиниями. В свою очередь, гидролиния 9 через гидролинию 20 связана с камерой 23 управления распределителя 20, который с противоположной стороны снабжен пружиной 24. Вместе с тем гидроцилиндр 8 управления через гидролинии 14 и 25, 17 и 26 связан со штоковой и поршневой полостями объемного дозатора 27. Приводной гидроцилиндр 28 объемного дозатора 27 через гидролинии 29-32, трехпозиционный распределитель 33 с двумя камерами управления и распределитель 34 с ручным управлением также связан с напорной и сливной гидролиниями 12 и 13. Камера 35 управления распределителя 33 связана с распределителем 20 гидролинией 36. Камера 37 управления, в которой размещен плунжер 38 золотпо гидролиниям 26 и 14 поступает в порщне- вую полость ГЦ 8, который начнет поворачивать скалыватель вверх. Колебательное движение скалывателя будет продолжаться до тех пор, пока усилие скалывателя и давление- рабочей жидкости в гидролинии 22 и камере управления 23 Р 20 не снизится до уровня переключения Р 20 в правую позицию. 2 ил.
0
ника распределителя 33, гидролиниями 39 и 40 связана с гидролинией 32, гидролинией 41 с камерой 42 управления двухпозицион- ного распределителя 43 с двумя камерами
5 управления, а гидролинией 44 - с гидролинией 31. Камера управления 45 распределителя 43 с гидролинией 46 связана с гидролинией 32.
В свою очередь, распределитель 43 с гидролиниями 47 и 40 связан с гидролинией 32, гидролинией 48 - с гидролинией 31, а гидролинией 49 - с распределителем 20.
Работа секции механизированной крепи осуществляется следующим образом.
В исходном положении козырек 1 и пере- 5 крытие 2 крепи прижаты к кровле. Для скалывания неотбитой комбайном или стругом подкровельной пачки угля включается распределитель 11, который соединяет напорную гидролинию 12 с гидролинией 9 и порщ- невой полостью гидроцилиндра 6, который 0 обеспечивает поступательное движение в направляющих 5 выдвижной консоли 4 и связанного с ней скалывателя 3. Из щтоковой полости гидроцилиндра 6 рабочая жидкость по гидролинии 10 через распределитель 11 поступает в сливную гидролинию 13. Для обеспечения в последующем движения козырька крепи по изменяющемуся профилю кровли пласта, например, вверх включается распределитель 21 так, что рабочая жидкость под давлением из гидролинии 12 поступает
Q в гндролинию 16 и далее через распределитель 20 и гидролинии 15 и 14 в поршневую полость гидроцилиндра 8 управления, который через рычаг 7 воздействует на скалыватель 3, обеспечивая его поворот вверх в процессе поступательного движения. При
2 этом рабочая жидкость из щтоковой полости гидроцилиндра 8 управления через гидролинии 17 и 18, распределитель 20, гидролинию 19 и распределитель 21 поступает в сливную гидролинию 13.
Перед началом выдвижки скалывателя
40 включается также распределитель 34, который соединяет гидролинии 32 и 31 с напорной 12 и сливной 11 гидролиниями. Если
5
давление рабочей жидкости в гидролинии 22 не превышает заданного уровня, то под действием пружины 24 распределитель 20 находится в позиции, когда камера 35 управления распределителя 33 соединена через гидролинии 36 и 19, распределитель 21 со сливной гидролинией 13. Другая камера 37 управления распределителя 33 через гидролинии 39 и 40 соединена с напорной гидролинией 32. Поэтому плунжер 38 с золотником распределителя 33 находится в крайнем левом поло- жении. При этом гидролиния 39 оказывается связанной с гидролинией 41 и камерой 42 управления распределителя 43. Вторая камера 45 этого распределителя также связана с гидролинией 32 через гидролинию 46. Поэтому давление рабочей жидкости в рабочих камерах 42 и 45 одинаково, но за счет того, что площадь поперечного сечения камеры 42 больше, чем камеры управления 45, распределитель 43 находится в левой позиции. Штоковая полость приводного гидроцилинд- ра 28 объемного дозатора 27 соединяется через гидролинии 30, 31 со сливной гидролинией 13.
Так как плошадь поршня приводного цилиндра 28 больше плошади поршня объемного дозатора 27, то поршень дозатора на- ходится в крайнем- праврм положении.
Если давление рабочей жидкости в гидролинии 22 и в камере управления 23 распределителя 20 достигнет предельного уровня, что произойдет при возрастании усилий скалывания подкровельной пачки угля, то распределитель 20 переключится в позицию, в которой гидролинии 15 и 18 окажутся запертыми, а камера 35 управления через гидролинию 36 свяжется с гидролинией 49, в которой находится рабочая жидкость под давлением. За счет того, что плошадь попереч- ного сечения камеры 35 управления больше, чем камеры 37 управления, золотник распределителя с плунжером 38 начнет двигаться вправо, перекрыв гидролинию 41. После перемещения плунжера на половину его хода произойдет переключение гидрораспределителя 33 во вторую позицию, при этом распределитель 33 переключится в позицию, при которой штоковая полость приводного гидроцилиндра 28 соединится через гидролинии 30, 32 напорной гидролинией 12, а поршневая полость - через гидролинии 31, 29 со сливной гидролинией 13. Поршень объемного дозатора 27 начнет двигаться влево, выталкивая жидкость в штокозую полость гидроцилиндра 8 управления через гидролинии 26 и 17. При этом скалыватель 3 не- сколько опустится. При дальнейшем движении плунжера 38 распределитель 33 соединит камеру 42 управления через гидролинии 41, 44 и 31 со сливной гидролинией 13.
Давление рабочей жидкости в камере 42 управления понизится, и за счет давления рабочей жидкости в камере 45 управления распределитель 43 переключится в позицию, при которой камера управления 35 через
гидролинии 36, 49, 48 и 31 окажется связанной со сливной гидролинией 13. Плунжер 38 распределителя 33 под действием давления |забочей жидкости в гидролинии 39 начнет двигаться влево.
При перемещении плунжера 38 влево на половину своего хода закончится перемещение объемного дозатора 27 влево и опускание скалывателя вниз. Распределитель 33 переключится в исходную позицию, при которой поршневая полость приводного цилиндра 28 окажется связанной с напорной гидролинией 12 и поршень объемного дозатора 27 начнет двигаться вправо, выталкивая рабочую жидкость через гидролинии 26 и 14 в поршневую полость гидроцилиндра 8 управления, который начнет поворачивать скалыватель 3 вверх. Колебательное движение скалывателя будет продолжаться до тех пор, пока усилия скалывания и давление рабочей жидкости в гидролинии 22 и камере 23 управления распределителя 20 не снизится до заданного уровня и под действием пружины 24 распределитель 20 переключится в правую позицию. При этом камера управления 35 через гидролинии 36 и 19 окажется гидравлически связанной со сливной гидролинией 13 и под действием давления рабрчей жидкости в камере управления 37 распределитель 33 окажется в левой позиции.
Формула изобретения
Гидросистема управления секциями крепи, включающая гидроцилиндры перемещения перекрытия и гидроцилиндр управления со штоковыми и поршневыми полостями, расположенные на перекрытии секции, распределители ручного управления и двухпо- зиционный распределитель с одной камерой гидроуправления, соединенные с напорной и сливной магистралями и с полостями гидроцилиндров, отличающаяся тем, что, с целью расширения эксплуатационных возможностей за счет повышения эффективности скалывания подкровельной пачки угля, она снабжена трехпозиционным и двухпозицион- ным распределителями, каждый из которых имеет две камеры гидроуправления, объемным дозатором со штоковой полостью и поршневыми полостями большего и меньшего диаметров, при этом поршневая полость гидроцилиндра перемешения соединена с камерой управления распределителя, с одной камерой управления, один выход которого сообщен с поршневой полостью гидроцилиндра и поршневой полостью меньшего диаметра объемного дозатора, другой выход - со штоковой полостью гидроцилиндра управления и штоковой полостью объемного дозатора, поршневая полость большего диаметра которого соединена с одним из распределителей ручного управления через трехпозиционный распределитель с двумя камерами управления, канал управления одной из камер которого сообщен с одним из распределителей ручного управления через распределитель с одной камерой управления и двухпозиционный распределитель с двумя
cfjua.i
камерами управления, канал управления одной из камер которого сообщен с одним из распределителей ручного управления и другой его камерой управления через другую камеру управления трехпозиционного распределителя с двумя камерами управления.
| Перекрытие секции механизированной крепи | 1986 |
|
SU1343026A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Гидросистема управления секциями крепи | 1985 |
|
SU1289997A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
