Изобретение относится к автоматическому контролю процесса бурения, а именно для измерения осевой нагрузки на дблотъ на забое скважины в процессе бурения.
Цель изобретения - повышени.е точности забойного датчика осевой нагрузки на долото.
На чертеже изображен забойньм датчик осевой нагрузки на долото.
В теле переводника 1 выполнен кольцевой упругий элемент 2. Равномерно по окружности размещены, например, три магнитоупругих датчика 3 силы. Первичный преобразователь снабжен peгулировочной опорой 4, силопередаю,1цкм штоком 5 с дифференциальным поршнем 6, надпоршневое пространство которого сообщается с внутритрубным пространством 7, а подпорпшевое через полость 8 - с затрубным пространством.
Датчик работает следующим образом
Настройка нуля первичных преобразователей 3 осуществляется регулировочными опорами 4. После спуска датчика на забой и при создан1гш осевой нагрузки на долото колонной бурильных труб упругий элемент 2, деформируясь под действием осевой нагрузки, передает усилие сжатия через силопередающие штоки 5 и регулировочные опоры 4 на датчики 3, которые преобразуют усилие сжатия в электрический сигнал.
Небольшая, по сравнению с силоизмерительной цепью, длина датчиков уменьшает погрешности измерения.
Гидравлическая составляющая осевой нагрузки разгружает упругий элемент 2 и через него первичные преобразователи. Одновременно внутритрубное давление действует на дифференциальный поршень и на него же через полость 8 воздействует затрубное давление.
На датчики 3 не воздействует крутящий момент вследствие малой длины датчика по сравнению со всей силоизмерительной цепью и низкого сопротивления датчиков в радиальном направлении по сравнению с осевым.
Равномерное размещение первичных преобразователей по окружности дает возможность скомпенсировать влияние изгибающих усилий.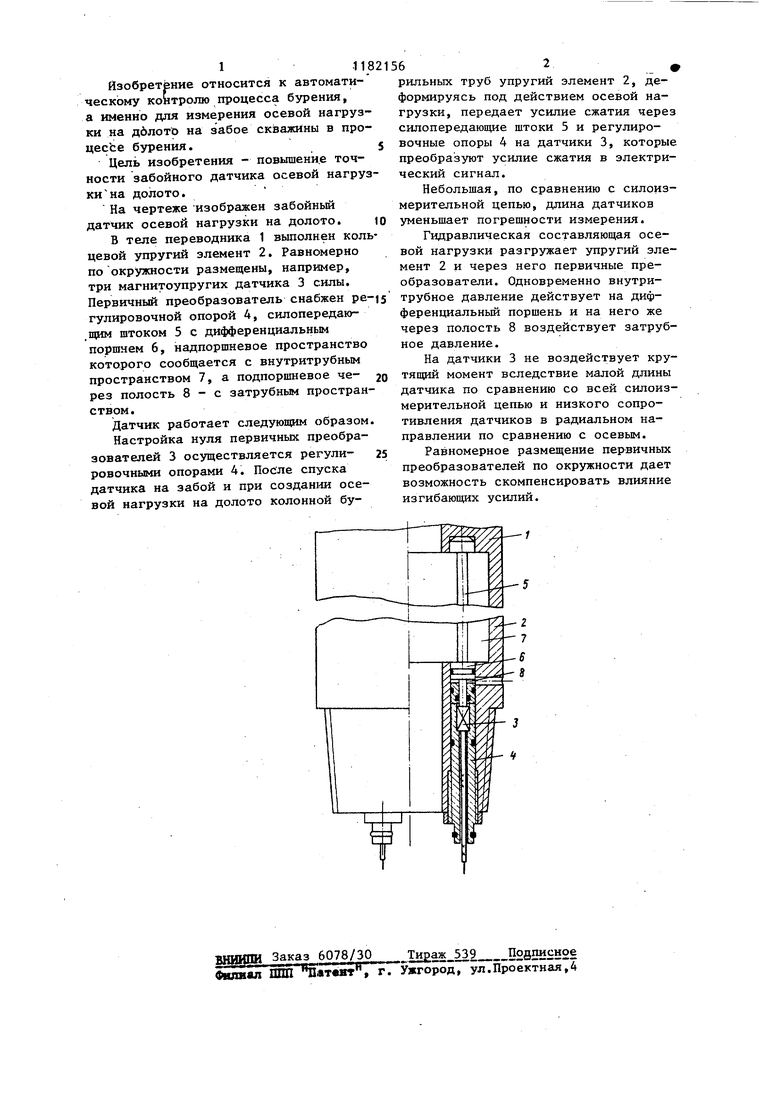
ЗАБОЙНЫЙ ДАТЧИК.ОСЕВОЙ НАГРУЗКИ НА ДОЛОТО, содержащий корпус, выполненный в виде полого упругого переводника, по крайней мере три равномерно расположенных по окруж..--- ности корпуса первичных преобразователя, отличающийся тем, что, с целью повышения точности измерения, упругий переводник выполнен с каналом в затрубное пространство, преобразователь выполнен в ввде упругого силопередающего йггока с поршнем на одном конце и магнитоупругого датчика силы, причем другой конец штока установлен с возможностью взаимодействия с торцом упругого переводника, а другой конец штока с поршнем - с противоположным торцом переводника через магнитоупругий датчик силы, при этом полость над поршнем со стороны штока сооб(Л щена с внутренней полостью переводника , а полость под поршнем со стороны магнитоупругого датчика силы - с каналом в затрубное пространство.
| Грачев Ю.В | |||
| и Варламов В.П | |||
| Автоматический контроль в скважинах при бурении.и эксплуатации | |||
| Приспособление для контроля движения | 1921 |
|
SU1968A1 |
| Счетный сектор | 1919 |
|
SU107A1 |
| Устройство для измерения усилий в колонне бурильных труб в процессе бурения | 1970 |
|
SU470587A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
