00 1C
4
;о
iw
из
-
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2006 |
|
RU2308802C1 |
| Устройство аналого-цифрового преобразования | 1988 |
|
SU1501268A2 |
| Устройство для управления следящим приводом | 1984 |
|
SU1187151A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2006 |
|
RU2308148C1 |
| Преобразователь угловых перемещений в код | 1978 |
|
SU743002A1 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU781866A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2003 |
|
RU2259631C2 |
| Модуляционный радиометр | 1984 |
|
SU1409953A1 |
| Устройство аналого-цифрового преобразования | 1987 |
|
SU1559405A2 |
| Цифроаналоговый преобразователь с автоматической коррекцией нелинейности | 1989 |
|
SU1709526A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СЛЕДЯЩМ- ПРИВОДОМ, содержащее реверсивньА счетчик импульсов, выходы которого через первый цифроаналоговьй преобразователь подключены к входам датчика обратной связи, выходом соединенного с первым входом . фазочувствительного детектора и механически связанного с приводом, к входу которого подключен выход сумматора, генератор опорного напряжения, выход которого соединен с вторыми входами перфого цифроаналогового преобразователя и фазочувствительного детектора, а также формирователь сигнала скорости, входы которого подключены к соответствующим входам устройства и реверсивного счетчика импульсов, а выход - к первому входу сзгмматора, о тличающееся тем, что, с целью повьшения точности устройства, в него введен второй цифроаналоговый преобразователь, входы которого § подключены к соответствующим выходам младших разрядов реверсивного (Л счетчика импульсов, а выход - к второму входу сумматора, третий вход которого соединен с выходом фазочувствительного детектора.
Uc
пр
I
Изобретение относится к автоматическому управлению и может быть использовано в системах числового программного управления приводами, содержащими циклические датчики обратной связи: вращающиеся трансформаторы, индуктосины и т.п.
Цель изобретения - повышение точности устройства.
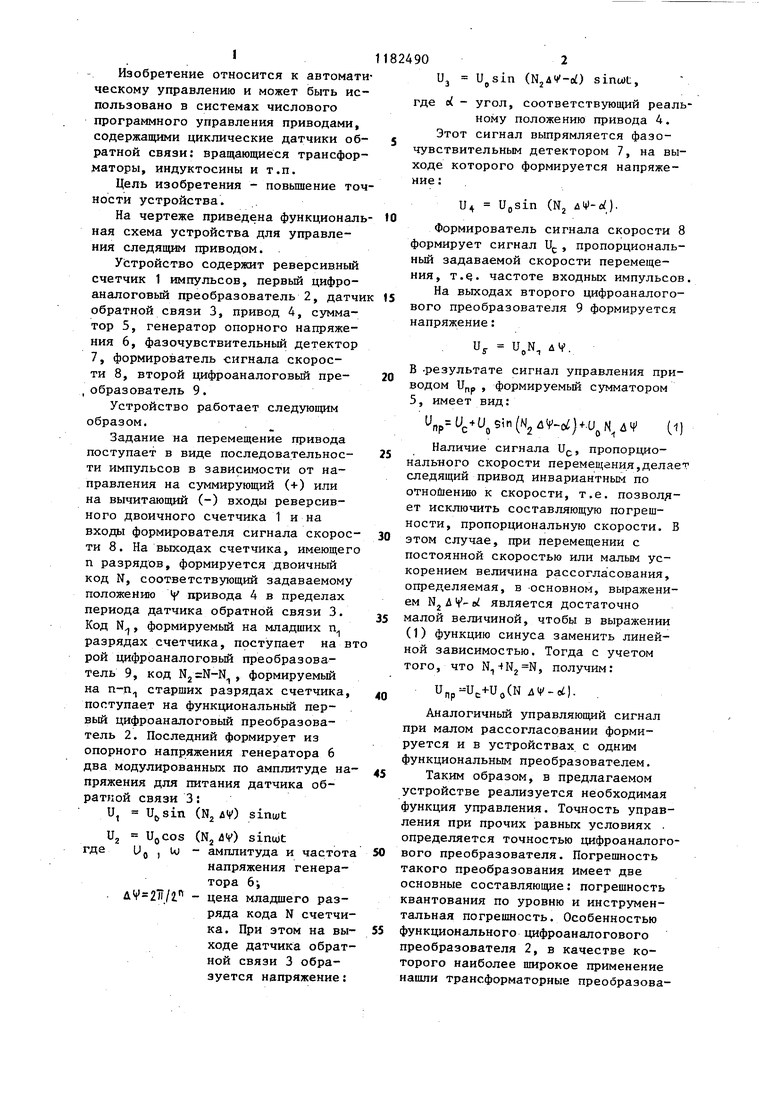
На чертеже приведена функциональная схема устройства для управления следящим приводом.
Устройство содержит реверсивный счетчик 1 импульсов, первый цифроаналоговый преобразователь 2, датчи обратной связи 3, привод 4, сумматор 5, генератор опорного напряжения 6, фазочувствительный детектор 7, формирователь сигнала скорости 8, второй цифроаналоговый пре, образователь 9.
Устройство работает следующим образом.
Задание на перемещение привода поступает в виде последовательности импульсов в зависимости от направления на суммирующий (+) или на вычитающий (-) входы реверсивного двоичного счетчика 1 и на входы формирователя сигнала скорости 8. На выходах счетчика, имеющего п разрядов, формируется двоичный код N, соответствующий задаваемому положению у привода 4 в пределах периода датчика обратной связи 3. Код N, формйруемьй на младших п разрядах счетчика, поступает на вт рой цифроаналоговый преобразователь 9, код NjsN-N, формируемый на п-п старших разрядах счетчика, поступает на функциональньй первый цифроаналоговый преобразователь 2. Последний формирует из опорного напряжения генератора 6 два модулированных по амплитуде напряжения для питания датчика обратной связи 3:
(N2 ДУ) sinwt
и
1
Uj UgCos (N2 dV) sinuit де UQ , U) - амплитуда и частота напряжения генератора 6,
. - цена младшего разряда кода N счетчика. При этом на выходе датчика обратной связи 3 образуется напряжение:
1824902
Uj Uj,sin (NjAf-oi) sintot,
где d - угол, соответствующий реальному положению привода 4. Этот сигнал выпрямляется фазочувствительным детектором 7, на выходе которого формируется напряжение :
U4 (Nj ).
Формирователь сигнала скорости 8 формирует сигнал U. , пропорциональный задаваемой скорости перемещения, т.е. частоте входных импульсов.
На выходах второго цифроаналогового преобразователя 9 формируется напряжение:
и,, U,N дЦ-,
В -результате сигнал управления приводом Unp , формируемый сумматором 5, имеет вид:
() Я
Наличие сигнала U, пропорционального скорости перемещения,делает следящий привод инвариантным по отношению к скорости, т.е. позволдет исключить составляющую погрешности, пропорциональную скорости. В
этом случае, при перемещении с
постоянной скоростью или малым ускорением величина рассогла сования, определяемая, в основном, выражением N А V- е является достаточно малой величиной, чтобы в выражении (1) функцию синуса заменить линейной зависимостью. Тогда с учетом того, что , получим:
,-HU,(N4V-ei). .
Аналогичный управляющий сигнал при малом рассогласовании формируется и в устройствах, с одним функциональным преобразователем.
Таким образом, в предлагаемом устройстве реализуется необходимая функция управления. Точность управления при прочих равных условиях . определяется точностью цифроаналогового преобразователя. Погрешность такого преобразования имеет две основные составляющие: погрешность квантования по уровню и инструментальная погрешность. Особенностью
функционального цифроакалогового преобразователя 2, в качестве которого наиболее широкое применение нашли трансформаторные преобразователи, является то, что они при Mano раз| ядности легко могут быть выполнены с малой инструментальной погрешностью. В преобразователе, имеющем 5-& разрядов, инструментальная погрешность может быть в 10 и более раз меньше погрешности квантования. Это объясняется тем, что трансформаторы легко могут быть выполнены с достаточно высокой точностью и инструментальная погрешность, в основном, определяется согласующими усилителями и последовательно соединенными коммутирующими элементами, число которых с увеличением разрядности быстро растет. При этом весьма существенным является нарушение идентичности коэффициентов передачи и фазовых сдвигов в двух каналах преобразователя. Из указанных особенностей следует, что точность управления может быть повьш1ена за счет уменьшения погрешности квантования по уровню при той же разрядности функционального преобразователя. В предлагаемом устройстве все это достигается за счет увеличения разрядности счетчика и :введениявторого цифроаналогового преобразователя. Число дополнитель904
ных разрядов п в счетчике и разрядность второго преобразователя определяется запасом по инструментальной погрешности первого преобразователя и может достигать 5. Число разрядов п целесообразно брать таким, чтобы погрешность квантования стала примерно равной инструментальной погрешности. При этом требования
к точности второго, преобразователя легко вьтолнимы, так как он преобразует младшие разряды кода N, имеющие малый вес.
Таким образом, увеличение разрядности счетчика и введение второго цифроаналогового преобразователя позволяет увеличить точность устройства в несколько раз при незначительных затратах. Кроме того предлагаемое устройство при одинаковой точности проще устройств с одним функциональным цифроаналоговым преобразователем, так как для преобразования младпшх разрядов в последних требуется увеличение разрядности двух каналов преобразователя, что требует примерно в два раза больше оборудования, чем на один преобразователь в предлагаемом устройстве.
| Многоканальное устройство для до-пуСКОВОгО КОНТРОля пАРАМЕТРОВ | 1979 |
|
SU840819A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления следящим приводом | 1976 |
|
SU703781A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
