Изобретение относится к оборудованию для производства строительных материалов и может быть использовано для резки пластических материалов например глиняного, бруса, непрерывно выходящего из ленточного пресса.
Целью изобретения является повышение точности управления устройством,
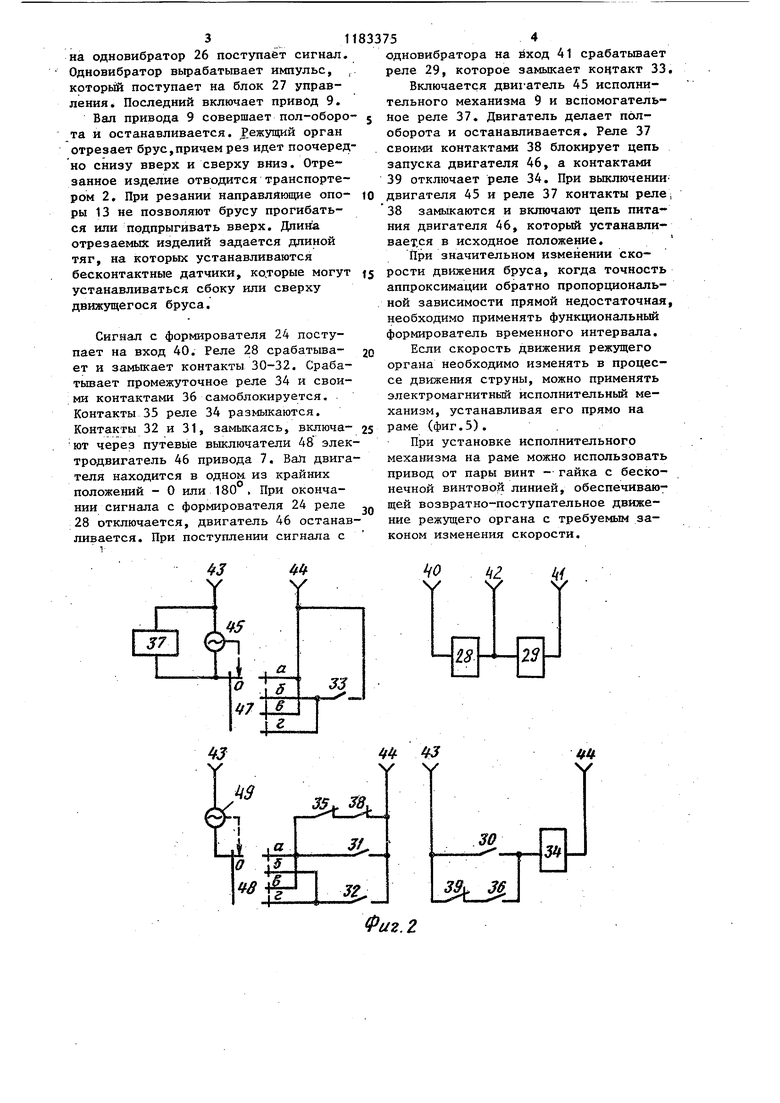
На фиг. 1 приведена комбинированная функциональная схема автомата; на фиг. 2 - пример схемы блокауправ ления, выполненного на реле; на фиг. 3 - диаграмма замыкания путевых выключателей исполнительных механизмов; на фиг, 4 - кинематическая схема привода подвижной рамы; на фиг.5 подвижная рама с электроприводом, установленным на раме; на фиг. 6 винтовой механизм перемещения рамки со струной.
Устройство для управления резки глиняного бруса (фиг. 1) состоит из транспортера 1 подачи бруса, транспортера 2 приема отрезанного изделия, качающейся рамы 3 с режущим органом, содержащим рамку 4 со струной 5 (фиг.5), совершающей вращательное движение вокруг цапф 6 при помощи исполнительного механизма 7 наклона и соответствующих тяг 8, причем режущий орган перемещается вверх и вниз при помощи привода 9 и соответствующих тяг 10, в качестве механиз- ма перемещения может быть использована пара винт 11 и гайка 12 (фиг.6), направляющих опор 13, предотвращающих прогиб бруса при резании, которые перемещаются в поддерживающих роликах 14, наружные ролики выполняются в виде валиков с длиной, превосходящей ширину бруса 15, выходящего из пресса 16, направляющие опо ры соединены шарнирами 17 с подвижной рамой, в которой имеются пазы 18 для перемещения шарниров при наклонах рамы. Ролики закреплены на косынках, которые выполняют роль боковых направляющих. С шарнирами опорных направляющих, установленными на стороне выхода бруса тяги 19 датчиков 20 и 21 длины. Датчики 22 и 23 наличия бруса соединены с формирователем 24 временного интервала, а датчики длины соединены со схемой ШИ 25 и одновибратором 26, Одновибратор 26 и форм1фователь 24 временного интервала подключены к блоку 27 управления.
Блок 27 управления (фиг.2) содерл жит реле 28 датчиков наличия бруса и реле 29 датчиков длины отрезаемых изделий с соответствующими контактами 30-33, промежуточное реле 34 с контактами 35 и 36 и вспомогательное реле 37 с контактами 38 и 39, На входы 40 и 41 поступает сигнал с формирователя 24 временного интерг вала и одновибратора 26, на входы 42-44 подается напряжение питания. Работа злектродвигателей 45 и 46 исполнительнЬк механизмов и путевых выключателей 47 и 48 показана на диаграмме (фиг.З). Стрелками на схемах показаны направления движения бруса и режущего органа.
Устройство работает следующим образом. -
Выходящий из пресса 16 брус 15 поступает на транспортер 1 и дале:е на направляющие опоры 13. Подвижная рама 3 находится в одном из крайних положений (фиг.4), а режущий oprak - в верхнем положении, если рама наклонена в сторону пресса, или в нижнем положении, если рама наклонена в другую сторону. Брус выходит из рамы. При достижении первого датчика 22 наличия бруса датчик реагирует на кромку бруса и вьщает сигнал на формирователь 24 временного интервала.
Формирователь подает сигнал на блок 27 управления, а последний включает привод 7 рамы. Подвижная рама 3 начинает перемещаться с помощью,- например, кривошипно-шатунног.о механизма, состоящего из тяг 8. При достижении брусом второго датчика 23 наличия бруса формирователь 24 заканчивает формировать временной интервал. Сигнал с блока 27 управления снимается и привод 7 выключается. Подвижная рама устанавливается под углом, соответствующим средней скорости движения бруса между датчиками в данньй момент. Чем медленнее скорость бруса, тем ближе к перпендикулярному направлению приближается рама. Крайние положения рамы соответствуют максимальной скорости движения бруса. Длина отрезаемого изделия определяется датчиками 20 и 21 длины. При достижении брусом первого из датчиков через схемь ИЛИ 25
31
на одновибратор 26 поступает сигнал. Одновибратор вырабатьгоает импульс, которьй поступает на блок 27 управления Последний включает привод 9.
Вал привода 9 совершает пол-оборо та и останавливается. Р.ежущий орган отрезает брус,причем рез идет поочеред но снизу вверх и сверху вниз. Отрезанное изделие отводится транспортером 2, При резании направляющие опоры 13 не позволяют брусу прогибаться или подпрыгивать вверх. Длина отрезаемых изделий задается длиной тяг, на которых устанавливаются бесконтактные датчики, ко торые могут устанавливаться сбоку или сверху движущегося бруса.
Сигнал с формирователя 24 поступает на вход 40. Реле 28 срабатывает и замыкает контакты 30-32. Срабатывает промежуточное реле 34 и своими контактами 36 самоблокируется. Контакты 35 реле 34 размыкаются. Контакты 32 и 31, замыкаясь, включают через путевые выключатели 48 элек тродвигатель 46 привода 7. Вал двига теля находится в одном из крайних положений - О или 180°. При окончании сигнала с формирователя 24 реле 28 отключается, двигатель 46 останав ливается. При поступлении сигнала с
833754
одновибратора на йход 41 срабатьшает реле 29, которое замыкает контакт 33.
Включается двих-атель 45 исполнительного механизма 9 и вспомогатель5 JJoe реле 37. Двигатель делает полоборота и останавливается. Реле 37 своими контактами 38 блокирует цепь запуска двигателя 46, а контактами 39 отключает реле 34. При выключениидвигателя 45 и реле 37 контакты реле; 38 замыкаются и включают цепь питания двигателя 46, который устанавливает.ся в исходное положение.
При значительном изменении скорости движения бруса, когда точность аппроксимации обратно пропорциональной зависимости прямой недостаточная, необходимо применять функциональный формирователь временного интервала. Если скорость движения режущего органа необходимо изменять в процессе движения струны, можно применять электромагнитный исполнительный механизм, устанавливая его прямо на раме (фиг.5).
При установке исполнительного мехаьшзма на раме можно использовать привод от пары винт - гайка с бесконечной винтовой линией, обеспечивающей возвратно-поступательное движение режущего органа с требуемым законом изменения скорости.
0
г / Ч/
J5. ж
аг. 2
О-а
ITs
0-6 О-г
о180
Ф1И.З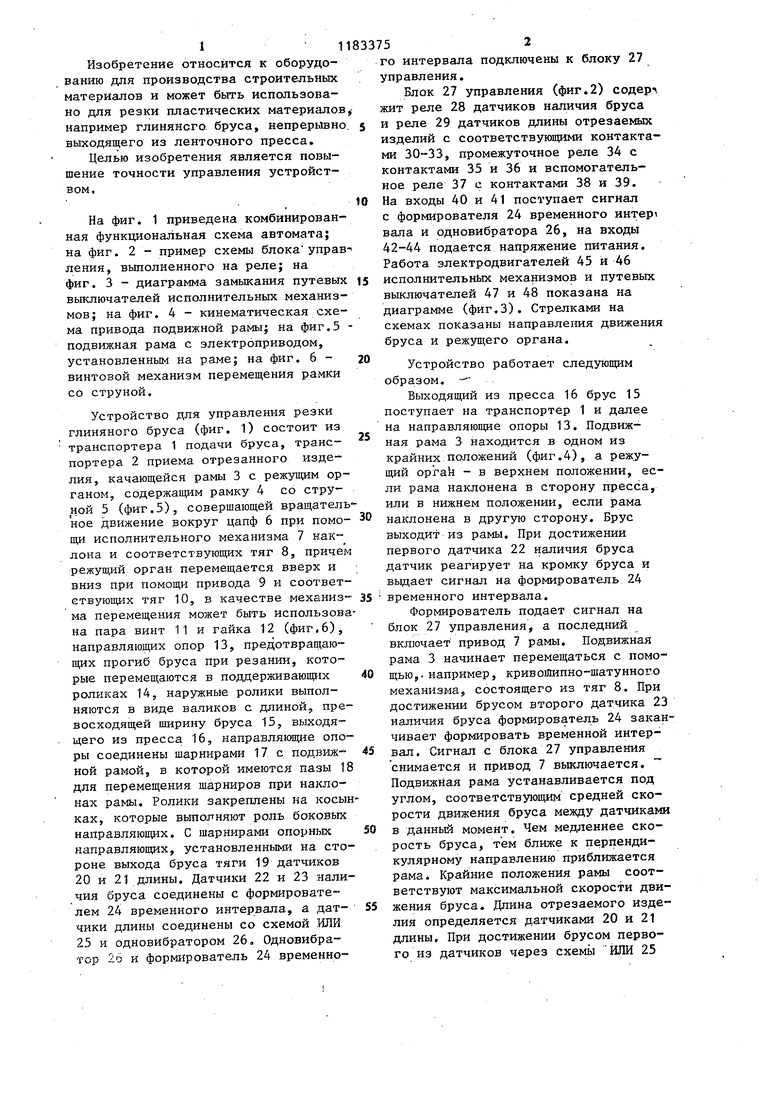
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для резки глиняного бруса | 1979 |
|
SU1044224A3 |
| Автомат для резки кирпича | 1984 |
|
SU1186494A1 |
| ВАЛКОВАЯ ЖАТКА | 2002 |
|
RU2242858C2 |
| Станок для резки кирпича и блоков | 1950 |
|
SU92241A1 |
| Устройство автоматического раскроя заготовки на летучем отрезном станке | 1986 |
|
SU1388205A1 |
| УСТАНОВКА ДЛЯ ПРОИЗВОДСТВА УГЛЕРОДОСОДЕРЖАЩИХ ФОРМОВОК (ВАРИАНТЫ) | 2002 |
|
RU2209232C1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ПЛАСТИЧНОГО БРУСА | 2009 |
|
RU2411121C1 |
| УСТАНОВКА ДЛЯ ФОРМОВАНИЯ И РЕЗКИ ГЛИНЯНОГО БРУСА | 1991 |
|
RU2030995C1 |
| СПОСОБ КОНТРОЛЯ ВЕЛИЧИНЫ ДОПУСТИМОГО СБЛИЖЕНИЯ ДВУХ ТРАНСПОРТНЫХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2033359C1 |
| СИСТЕМА УПРАВЛЕНИЯ СОРТИРОВКОЙ НАРЕЗАННОГО КАРТОФЕЛЯ | 1990 |
|
RU2016670C1 |

УСТРОЙСТВО для УПРАВЛЕНИЯ РЕЗКОЙ ГШНЯНОГО БРУСА, содержащее одновибратор, блок управления и при водную раму с режущим органом, кото рьй кинематически связан с приводом отличающееся тем, что, с целью повышения точности управления, в него введены два датчика наличия бруса, два датчика длины, логический элемент ИДИ и формирователь временного интервала, а рама кинематически связана с датчиками длины, причем последние подключены к соответствующим входам элемента 11ПИ, выход которого через одновибратор соединен с одним входом блока управления, выходы которого подключены к приводам режущего органа и рамы, а другой вход блока управления соединен через формирователь временного интервала с соответствуницими датчиками наличия бруса. (вш: /« лг 
и
Фиг.5
12
Фаг.6
| Автомат для резки кирпича-сырца | 1975 |
|
SU543519A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Авторское свидетельство СССР 916319, кл | |||
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
