Изобретение относится к средствам дистационного контроля величины сближения двух подвижных объектов и может найти применение при создании систем автоматизированного контроля и управления транспортными средствами на карьерах.
Известен способ контроля величины допустимого сближения между двумя транспортными средствами, заключающийся в том, что на контрольном пункте излучают зондирующий сигнал, принимают сигнал от транспортного средства, по которому определяют взаимное расположение контролируемых объектов (а.с. СССР N 1255494, кл. B 61 L 25/00, 1986). Недостатком известного способа является то, что с увеличением числа транспортных средств резко снижаются оперативность контроля и его надежность.
Наиболее близким по технической сущности и достигаемому результату к заявленному является способ контроля величины допустимого сближения между двумя транспортными средствами, заключащийся в считывании транспортным средством координат пути, формируемых путевыми датчиками, преобразовании считанного значения в двоичный код, передаче двоичного кода на центральную станцию. Недостатки известного способа низкие надежность и оперативность контроля.
Низкая надежность контроля обусловлена тем, что наложение или частичное перекрытие в канале связи кодов координат, передаваемых с нескольких транспортных средств одновременно, приводит к их потере. Такая ситуация может оставаться неизменной в течение длительного времени, что приводит к значительным перерывам контроля и может вызвать появление аварийных ситуаций. Низкая оперативность контроля объясняется тем, что неудачные попытки передачи координат увеличивают общее время получения информационной картины о взаимном расположении транспортных средств, что исключает своевременную реакцию оператора или управляющей вычислительной машины на нежелательное развитие транспортной ситуации. Кроме того, централизованное управление режимами движения транспортных средств приводит к существенной задержке передачи управляющих воздействий в случае появления угрозы столкновения в нескольких точках одновременно. Перечисленные недостатки приводят в конечном счете или к появлению аварийных ситуаций, или к резкому снижению производительности транспортного комплекса, например, в условиях разреза или карьера.
Цель изобретения способа повышение надежности и оперативности контроля.
Поставленная цель достигается тем, что в способе контроля величины допустимого сближения между двумя транспортными средствами, заключающемся в разметке транспортного пути путем установки с равными промежутками путевых датчиков, формирующих соответствующие коды координат пути, считывании каждым транспортным средством координат пути, передаче двоичного кода по каналу связи путем модуляции по фазе высокочастотного сигнала несущей частоты, приеме фазомодулированного высокочастотного сигнала несущей, его демодуляции и выделении двоичного кода, определяют сочетание координат пути С1, безопасных для продолжения движения транспортных средств из условия:
I (Ni Nj) I > 3l, где (Ni), (Nj) значение координат пути;
l длина тормозного пути транспортного средства при его движении на максимальной для данного участка пути скорости, и запоминают их, определяют сочетания координат пути С2, требующих повышенного внимания оператора, из условия:
2l < I (Ni Nj) I < 3l и запоминают их, определяют сочетания координат пути С3, опасных для продолжения движения, из условия:
I (Ni Nj) I ≅ 2l и запоминают их. Размечают транспортные средства путем присвоения каждому из них порядкового номера, который запоминают на соответствующем транспортном средстве. Формируют на каждом транспортном средстве циклически повторяющуюся последовательность неперекрывающихся и равных по длительности временных интервалов, число которых соответствует числу транспортных средств, запоминают двоичный код очередной координаты пути после ее считывания, передачу двоичного кода текущей координаты пути с транспортного средства осуществляют в течение временного интервала, порядковый номер которого в цикле соответствует порядковому номеру данного транспортного средства, а в течение действия других временных интервалов принимают из канала связи двоичные коды координат пути остальных транспортных средств. Определяют в конце каждого временного интервала на каждом транспортном средстве текущее сочетание Стек координат пути данного i-го транспортного средства и j-го транспортного средства, передавшего координату пути в истекшем интервале времени. Формируют сигнал безопасного движения при СтекЭ C1} и сигнал предупреждения при Стек Э{2} включают тормозную систему транспортного средства при Стек Э{C3} Синхронизацию формирования на транспортных средствах циклически повторяющихся временных импульсов осуществляют по принятым сигналам синхронизации, периодически передаваемым с центральной станции по каналу связи пути модуляции по фазе высокочастотного сигнала несущей частоты f2.
Перечисленные отличия свидетельствуют о соответствии изобретения критерию "новизна".
Признаки предложенного способа "определяют сочетания координат пути С1, безопасных для продолжения движения, требующих повышенного внимания оператора, опасных для продолжения движения и запоминают их" и сформированные условия их определения являются существенными, поскольку позволяют предварительно, с учетом конкретных условий эксплуатации и режимов движения транспортных средств установить, в каких случаях следует формировать управляющие воздействия для предотвращения возможных столкновений.
Признак способа "различают транспортные средства путем присвоения каждому из них порядкового номера, который запоминают" является существенным, поскольку позволяет установить однозначное соответствие между номером транспортного средства и временным интервалом его работы на передачу кода координаты.
Признак способа "формируют на каждом транспортном средстве циклически повторяющуюся последовательность неперекрывающихся и равных по длительности временных интервалов, число которых соответствует числу транспортных средств" является существенным, поскольку исключает возможность столкновения в канале связи кодов координат от различных транспортных средств и, соответственно, их потерю.
Признак способа "запоминают двоичный код очередной координаты пути после ее считывания" является существенным, поскольку обеспечивает хранение считанного значения до разрешающего интервала его передачи.
Признак способа "передачу двоичного кода текущей координаты пути с транспортного средства осуществляют в течение временного интервала, порядковый номер которого в цикле соответствует порядковому номеру данного транспортного средства" является существенным, поскольку исключает возможность столкновения кодов координат, передаваемых с различных транспортных средств одновременно.
Признак способа "в течение действия других временных интервалов принимают из канала связи двоичные коды координат остальных транспортных средств" является существенным, поскольку позволяет определить взаимное расположение транспортных средств по имеющимся текущим координатам.
Признак способа "определяют в конце каждого временного интервала на каждом транспортном средстве текущее сочетание координат пути данного транспортного средства и транспортного средства передавшего координату пути в истекшем интервале времени" является существенным, поскольку позволяет оценить степень сближения координат транспортных средств в режиме реального времени.
Признаки способа "формируют сигнал безопасного движения, формируют сигнал предупреждения, включают тормозную систему транспортного средства", реализуемые при сформированных условиях, являются существенными, поскольку конкретизируют условия формирования сигналов оповещения и управления.
Признак способа "синхронизацию формирования на транспортных средствах циклически повторяющихся временных интервалов осуществляют по принятым сигналам синхронизации, периодически передаваемым с центральной станции по каналу связи путем модуляции по фазе высокочастотного сигнала несущей частоты" является существенным, поскольку обеспечивает точное формирование временных интервалов на протяжении всего времени функционирования транспортного комплекса.
В известной научно-технической и патентной литературе не обнаружено признаков, совпадающих с существенными признаками, отличающими заявленный способ от прототипа, на основании чего сделан вывод о соответствии предложенного способа критерию изобретения "существенного отличия".
Известно устройство для локомотивной сигнализации, содержащее антенну, соединенную с переключателем режимов работы, подключенным через последовательно соединенные усилители сигналов приема и детектор (а.с. СССР N 472839, кл. B 61 L 25/00, 1972). Недостатки известного устройства низкие достоверность и оперативность контроля при достаточно большом числе одновременно движущихся транспортных средств.
Наиболее близким по технической сущности и достигаемому результату к заявленному является устройство для передачи информации между транспортными средствами, содержащее передатчик и приемник, подключенные через развязывающий фильтр к приемо-передающей антенне, регистр и последовательно-параллельный регистр. Недостатки известного устройства низкие надежность и оперативность контроля при большом числе одновременно движущихся транспортных средств.
Низкая надежность контроля обусловлена тем, что в известном устройстве не обеспечивается передача информации без неудачных попыток, что имеет место при одновременной передаче информации от нескольких транспортных средств. Столкновение в канале связи информационных сообщений от различных источников приводит к их искажению и снижает достоверность принятых на центральной станции сообщений. Поскольку конфликтная ситуация в канале связи может сохраняться достаточно длительное время, то резко возрастает время доставки сообщения адресату, т.е. снижается оперативность контроля.
Цель изобретения устройства повышение надежности и оперативности контроля.
Поставленная цель достигается тем, что в устройство для контроля величины допустимого сближения между двумя транспортными средствами, содержащее передатчик и приемник, подключенные через развязывающий фильтр к приемо-передающей антенне, регистр и параллельно-последовательный регистр, введены первичный преобразователь координаты пути, задатчик кода, формирователь временного интервала, мажоритарный элемент, генератор тактовых импульсов, инвертор, усилитель-формирователь, второй приемник, коммутатор, второй регистр, кольцевой счетчик, схема определения величины сближения, одновибратор, блок преобразователей и блок исполнительных элементов. Информационные выходы и стробирующий выход первичного преобразователя подключены к соответствующим входам первого регистра, соединенного информационными выходами с первой группой входов схемы определение величины сближения и с параллельными входами параллельно-последовательного регистра, подключенного последовательным выходом к модулирующему входу передатчика. Выходы задатчика кода подключены к задающим входам формирователя временного интервала, первый управляющий выход которого соединен с управляющим входом параллельно-последовательного регистра и первым входом мажоритарного элемента. Второй управляющий выход соединен со вторым входом мажоритарного элемента и через инвертор с управляющим входом коммутатора. Выход генератора тактовых импульсов подключен к третьему входу мажоритарного элемента и к тактовому входу
формирователя временного интервала. Выход первого приемника через усилитель-формирователь соединен с синхронизирующими входами формирователя временного интервала и кольцевого счетчика. Выход мажоритарного элемента соединен с тактовым входом параллельно-последовательного регистра. Вход второго приемника через развязывающий фильтр подключен к приемо-передающей антенне. Его тактовый и информационные выходы через коммутатор подключены с соответствующими входами второго регистра, подключеннного информационными входами ко второй группе входов схемы определения величины сближения, подключенной выходами к группе входов блока преобразователей, вход которого соединен с выходом кольцевого счетчика через одновибратор. Тактовый вход второго регистра соединен с тактовым входом кольцевого счетчика, а выходы блока преобразователей подключены ко входам блока исполнительных элементов. Перечисленные отличия свидетельствуют о соответствии предлагаемого устройства критерию изобретения "новизна".
Технических решений, содержащих признаки, отличающие заявленное устройство от прототипа, не обнаружено, на основании чего сделан вывод о соответствии предлагаемого устройства критерию изобретения "существенные отличия".
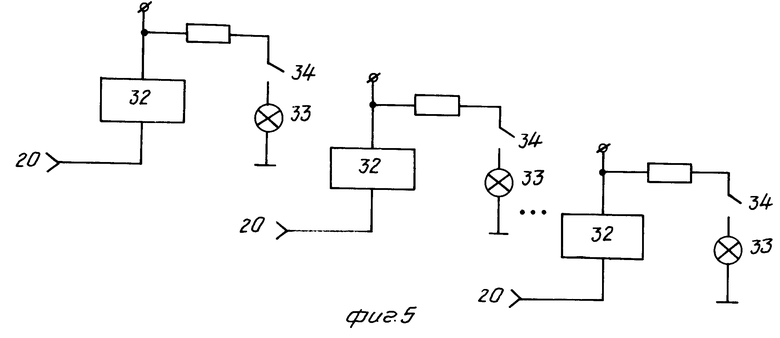
На фиг. 1 изображена структурная схема устройства для контроля величины допустимого сближения между двумя транспортными средствами; на фиг. 2 электрическая функциональная схема формирователя временного интервала; на фиг.3 электрическая принципиальная схема коммутатора; на фиг.4 электрическая принципиальная схема преобразователя; на фиг.5 электрическая принципиальная схема блока исполнительных элементов.
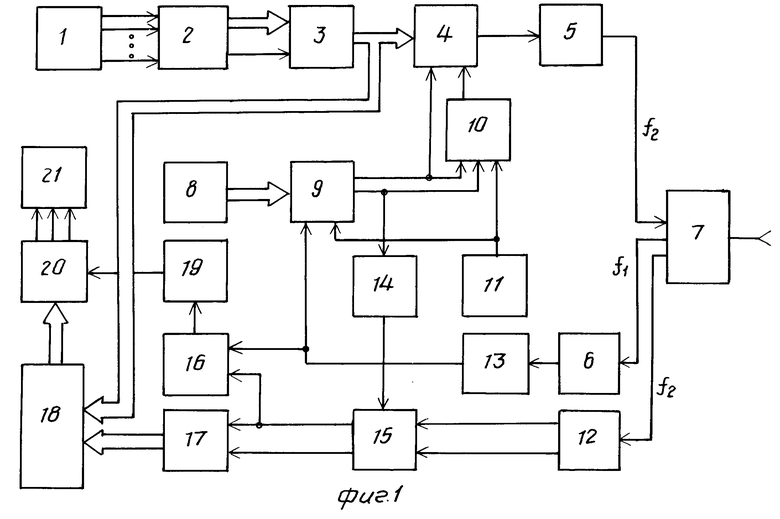
Устройство для контроля величины допустимого сближения между двумя транспортными средствами содержит путевой датчик 1 (устанавливается вне транспортного средства по трассе его движения), первичный преобразователь 2, регистр 3, параллельно-последовательный регистр 4, передатчик 5, первый приемник 6, развязывающий фильтр 7, датчик 8 кода, формирователь 9 временного интервала, мажоритарный элемент 10, генератор 11 тактовых импульсов, второй приемник 12, усилитель-формирователь 13, инвертор 14, коммутатор 15, кольцевой счетчик 16, второй регистр 17, схему 18 определения величины сближения, одновибратор 19. блок 20 преобразователей, блок 21 исполнительных элементов.
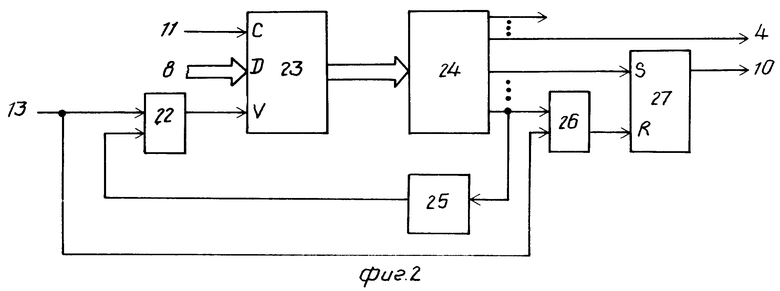
Формирователь 9 временного интервала содержит элемент ИЛИ 22, двоичный счетчик 23 с предварительной установкой, дешифратор 24, одновибратор 25, элемент ИЛИ 26, триггер 27.
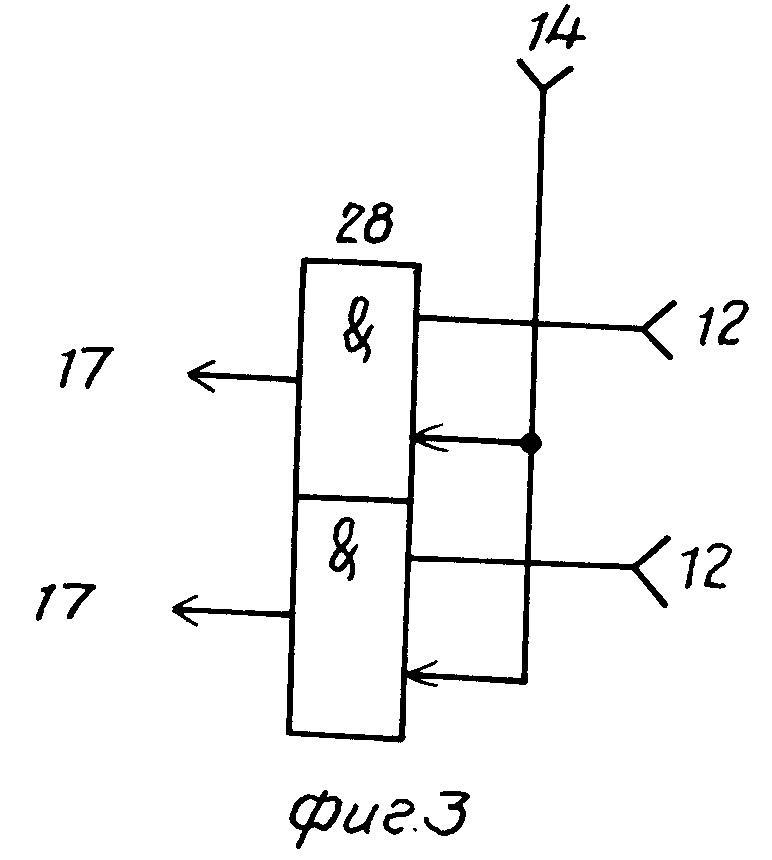
Коммутатор 15 состоит из двух двухвходовых элементов И 28.
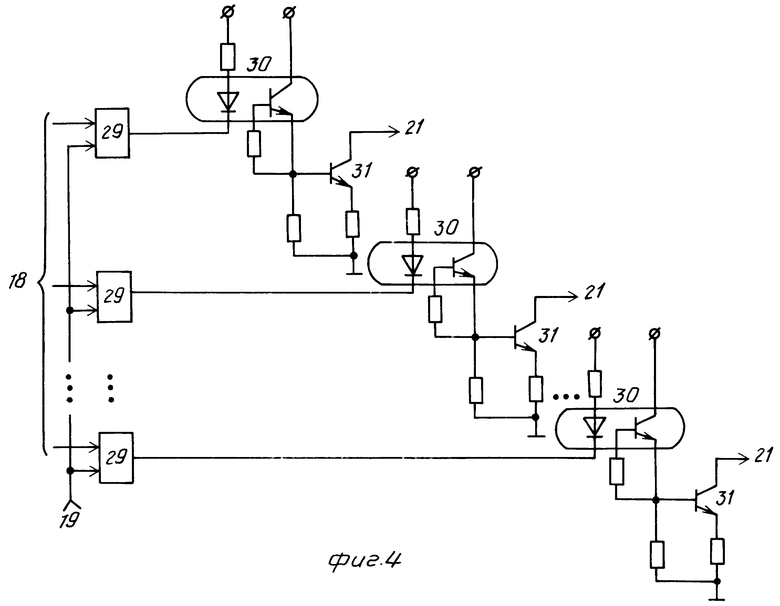
Блок 20 преобразователей содержит элементы 29 с открытым коллектором, оптроны 30, выходные транзисторы 31.
Блок 21 исполнительных элементов содержит электромагнитные реле 32, элементы 33 индикации и параллельно разомкнутые контакты 34.
В устройстве для контроля величины допустимого сближения между двумя транспортными средствами информационные входы и стробирующий выход первичного преобразователя 2 подключены к соответствующим входам регистра 3. Информационные выходы регистра 3 подключены ко входам параллельной записи параллельно-последовательного регистра 4 и к первой группе входов схемы 18 определения величины сближения. Последовательный выход регистра 4 подключен к модулирующему входу передатчика 5, соединенного через развязывающий фильтр 7 с антенной. Информационные выходы задатчика 8 кода подключены ко входам предварительной установки формирователя 9 временого интервала, первый управляющий выход которого соединен со входом управления режимами работы параллельно-последовательного регистра 4 и с первым входом мажоритарного элемента 10. Второй управляющий выход формирователя 9 временного интервала подключен ко второму входу мажоритарного элемента 10 и через инвертор 14 соединен с управляющим входом коммутатора 15. Выход генератора 11 тактовых импульсов соединен с тактовым входом формирователя 9 временного интервала и третьим входом мажоритарного элемента 10. Входы первого и второго приемников 6 и 12 подключены к входам развязывающего фильтра 7. Выход первого приемника 6 через усилитель-формирователь 13 соединен со входами сброса кольцевого счетчика 16 и формирователя 9 временного интервала. Тактовый и информационный выходы второго приемника 12 через коммутатор 15 подключены к соответствующим входам второго регистра 17, соединенного информационными входами со второй группой входов схемы 18 определения величины сближения. Тактовый вход кольцевого счетчика 16 подключен к тактовому входу регистра 17. Выходом кольцевой счетчик через одновибратор 19 подключен к стробирующему входу блока 20 преобразователя, информационные входы которого соединены с соответствующими входами схемы 18 определения величины сближения. Выходы блока 20 преобразователей подключены ко входам блока 21 исполнительных элементов. На фиг.1 не показан синтезатор частот, формирующий сигнал несущей частоты для передатчика 5 и сигналы частот гетеродинов для приемников 6 и 12.
Первичный преобразователь 2 предназначен для считывания координаты пути (преобразования сигнала, формируемого путевым датчиком) и ее преобразования в двоичный код, удобный для последующей обработки. Форма выполнения первичного преобразователя зависит от типа используемого путевого датчика и метода считывания координат пути: магнитный, оптический, магнитно-индукционный, радиолокационный и т.п. Форма выполнения первичного преобразователя несущественно для работоспособности устройства и для достижения поставленной цели изобретения.
Регистр 3 предназначен для запоминания и временного хранения двоичного кода координаты пути при каждом ее считывании. Может быть выполнен на микросхемах типа 155ИР1 или аналогичных им.
Параллельно-последовательный регистр 4 предназначен для записи в параллельном виде двоичного кода координаты пути непосредственно перед ее передачей в эфир и списывания в последовательном виде двоичного кода координаты пути во время действия разрешающего передачу сигнала. Может иметь выполнение, аналогичное регистру 3.
Передатчик 5 предназначен для модуляции высокочастотного сигнала несущей в соответствии с двоичным кодом координаты пути, его усиления по мощности и передачи по радиоканалу.
Приемник 6 предназначен для приема из радиоканала модулированного синхросигналом несущего колебания, его демодуляции и формирования синхросигнала.
Приемник 12 предназначен для приема из радиоканала модулированного высокочастотного сигнала несущей, его демодуляции, выделения из принятого сигнала информационных символов и формирования сопровождающих их тактовых сигналов.
Развязывающий фильтр 7 предназначен для развязки приемного и передающего трактов, подключаемых к одной антенне.
Задатчик 2 кода предназначен для задания временного положения формируемого разрушающего сигнала относительно некоторой начальной точки временной шкалы. Временное положение разрешающего сигнала является индивидуальным для каждого транспортного средства и может быть задано, например, в соответствии с его порядковым номером. Задатчик 8 кода может быть выполнен в виде кодовой заглушки, устанавливаемой на внешний разъем устройства, которая обеспечивает подачу индивидуального двоичного кода на входы предварительной установки формирователя 9 временного интервала.
Формирователь 9 временного интервала предназначен для управления подготовкой двоинчого кода координаты к передаче, формирования разрешающего сигнала и управления описыванием двоичного кода координаты. Пример выполнения формирователя 9 приведен на фиг.2. В качестве элементов формирователя 22.27 могут быть использованы типовые микросхемы средней степени интеграции серии 133.
Мажоритарный элемент 10 предназначен для логического объединения выходных управляющих сигналов формирователя 9 и выходных сигналов генератора 11 тактовых импульсов. Может быть выполнен на элементе 564 ЛП 13.
Генератор 11 тактовых импульсов предназначен для формирования тактовых импульсов, определяющих длительность формирования разрешающего сигнала и величину скорости передачи двоичного кода координаты по каналу связи.
Схема 18 определения величины сближения предназначена для выявления критических сочетаний координат двух транспортных средств и формирования соответствующих логических сигналов. Может быть выполнена на программируемых логических матрицах или на ППЗУ типа 573 РФ2.
Периодическая передача синхронизирующего сигнала осуществляется с центрального пункта.
Предлагаемый метод контроля величины допустимого сближения между двумя транспортными средствами реализуется следующим образом. Вдоль трасс движения транспортных средств в определенном порядке устанавливают путевые датчики, несущие информацию о координате пути. После этого определяют сочетания координат пути С1, безопасных для продолжения движения транспортных средств, из условия
I (Ni Nj) I> 3l, где (Ni), (Nj) значения координат пути;
l длина тормозного пути транспортного средства при его движении на максимальной для данного участка пути скорости, и запоминают их. Затем определяют сочетания координат пути С2, требующих повышенного внимания оператора, из условия
2l < I (Ni Nj) I < 3l и также запоминают их. Наконец, определяют сочетания координат пути С3, опасных для продолжения движения, из условия
I (Ni Nj) I < 2l и запоминают их. Полученные сочетания (С1, С2 и С3) координат пути хранят на каждом транспортном средстве, участвующем в процессе движения.
Одновременно с определением возможных сочетаний координат пути различают транспортные средства, участвующие в движении, путем присваивания каждому из них порядкового номера. Полученный порядковый номер запоминают и непрерывно хранят на каждом транспортном средстве.
Таким образом, перед началом движения (перед началом эксплуатации транспортного участка) оказываются размеченными трассы движения транспортных средств, определены возможные сочетания координат пути для каждого из трех типов сближения двух транспортных средств и размечены непосредственно транспортные средства, участвующие в движении.
В процессе движения на каждом транспортном средстве формируют циклически повторяющуюся последовательность непрерывающихся во времени и равных по длительности временных интервалов, число которых соответствует числу транспортных средств, участвующих в движении. Длительность временного интервала выбирают из условия
τ ≥ N ˙ T, где N максимальная разрядность кода координаты;
Т период передачи кода координаты по каналу связи.
Во время прохождения транспортным средством путевого датчика координата пути считывается и запоминается. Передачу двоичного кода текущей координаты пути с транспортного средства осуществляют в течение действия временного интервала, порядковый номер которого в цикле соответствует порядковому номеру данного транспортного средства. В течение действия всех остальных временных интервалов на каждом транспортном средстве принимают из канала связи двоичные коды координат пути, передаваемых остальными транспортными средствами. После приема очередной координаты на каждом транспортном средстве определяют текущее сочетание Стек координат пути (собственной координаты и принятой в данном временном интервале). Затем устанавливают, какому из трех типов сочетаний принадлежит текущее сочетание, и формируют сигнал безопасного движения при Стек Э{C1} формируют сигнал предупреждения при Стек Э{C2} включают тормозную систему транспортного средства при Стек Э{C3}
Таким образом, в процессе движения на каждом транспортном средстве контролируется его положение относительно других транспортных средств и формируются сигналы предупреждения или управления при достижении критического взаимного расположения.
На каждом транспортном средстве осуществляют синхронизацию формирования циклически повторяющихся временных интервалов по периодически передаваемым с центрального (или общего) пункта синхросигналом. Это обеспечивает требуемую очередность передачи в эфир кодов координат и исключает столкновение передач в канале связи.
Таким образом, предлагаемый способ обеспечивает высокую надежность и оперативность контроля, поскольку исключены конфликты в канале связи и безуспешные передачи, и практически за один цикл формирования временных интервалов транспортное средство имеет информацию о взаимном расположении не только по отношению к какому-либо одному, но и по отношению ко всем транспортным средствам, участвующим в движении.
Предложенный способ может быть осуществлен с помощью устройства, функциональная схема которого представлена на фиг.1.
Устройство для контроля величины допустимого сближения между двумя транспортными средствами работает следующим образом.
При прохождении транспортным средством путевого датчика первичный преобразователь 2 воспринимает код координаты пути, преобразует его к виду, удобному для последующего использования (например преобразует в уровни логических сигналов) и передает в сопровождении стробирующего сигнала на соответствующие входы регистра 3. В регистре 3 двоичный код координаты запоминается и хранится до момента появления другого путевого датчика. Двоичный код координаты с информационных выходов регистра 3 поступает на параллельные входы параллельно-последовательного регистра 4. Появление сигнала на первом управляющем выходе формирователя 9 переводит регистр 4 в режим параллельной записи информации и по тактовому сигналу с выхода генератора 11 тактовых импульсов, проходящему через открытый мажоритарный элемент 10, в регистр 4 записывается двоичный код координаты, хранящейся в регистре 3. По завершении записи кода координаты в регистр 4 на первом управляющем выходе формирователя 9 сигнал исчезает и регистр 4 переводится в режим последовательного сдвига двоичного кода.
При появлении сигнала на втором управляющем выходе формирователя 9 вновь открывается мажоритарный элемент 10, на выход которого проходят тактовые сигналы с выхода генератора 11 тактовых импульсов. В результате этого код координаты в последовательном виде поступает с последовательного выхода параллельно-последовательного регистра 4 на модулирующий вход передатчика 5. Одновременно на управляющий вход передатчика 5 поступает разрешающий его работу сигнал с выхода формирователя 9. В передатчике 5 несущее колебание модулируется, например, по фазе, двоичным сигналом, поступающим с выхода регистра 4 и, проходя через развязывающий фильтр 7, излучается в эфир. По окончании действия разрешающего сигнала на выходе формирователя 9 передатчик 5 выключается до появления следующего разрешающего сигнала.
Задатчик 8 кода является задатчиком величины смещения момента появления разрешающего сигнала на выходе формирователя 9 относительно начала периода последовательности временных интервалов, формируемых на борту транспортного средства. Поэтому в формирователь 9 при появлении сигнала на его синхронизирующем входе записывается начальное смещение, обеспечивающее появление разрешающего сигнала во время действия временного интервала, очередность появления которого соответствует порядковому номеру транспортного средства.
Первый и второй приемники 6 и 12 настроены на прием сигналов на различных участках, причем приемник 12 настроен на частоту работы передатчика 5. Благодаря этому приемник 12 принимаем все передаваемые другими транспортными средствами коды координат, кроме собственного, поскольку в момент работы передатчика 5 данного транспортного средства коммутатор 15 отключен.
Приемник 6 выделяет из принятого сигнала синхропосылку, усиливает и формирует из нее короткий импульс, который синхронизирует работу кольцевого счетчика 16 и формирователя 9.
В процессе приема кодов координат из канала связи на выходе приемника 12 появляются двоичные последовательности в сопровождении тактовых импульсов. Если коммутатор 15 открыт, то указанные сигналы поступают на соответствующие входы второго регистра 17, а тактовые сигналы, кроме того, поступают на тактовый вход кольцевого счетчика 16.
После заполнения регистра 17 кодом координаты возникает переполнение кольцевого счетчика 16 и на его выходе появляется сигнал, запускающий одновибратор 19. На входы схемы 18 определения величины сближения поступает двоичный код текущей координаты данного транспортного средства с выходов регистра 3 и двоичный код координаты другого транспортного средства с выходов регистра 17. Оба этих кода образуют адресный код (т.е. сочетания координат) в соответствии с которым на выходах схемы 18 появляются сигналы предупреждения или управления. Эти сигналы поступают на входы блока 20 преобразователей, в котором они стробируются выходным сигналом одновибратора 19. После стробирования сигналы с выходов блока 20 преобразователей поступают на соответствующие исполнительные элементы в блок 21, вырабатывающие сигналы включения элементов индикации или тормозной системы транспортного средства.
Таким образом, предложенное устройство обеспечивает оперативный и надежный контроль величины сближения транспортного средства с другими транспортными средствами, участвующими в движении.
Формирователь 9 временного интервала работает следующим образом. На тактовый вход двоичного счетчика 23 поступают сигналы с выхода генератора 11 тактовых импульсов, а на выходы его предварительной установки подается код начального смещения с выходов задатчика 8 кода. Счетчик 23 изменяет выходной код с приходом каждого тактового импульса. Дешифратор 24 дешифрует состояния счетчика и формирует управляющие сигналы, соответствующие заданному состоянию. За тактом до включения триггера 27 дешифратор 24 формирует выходной сигнал, устанавливающий режим параллельной записи регистра 4. В следующем такте дешифратор 18 формирует сигнал включения триггера 27, а спустя заданное число тактов сигнал его отключения. На выходе триггера 27 образуется разрешающий сигнал, который поступает на вход мажоритарного элемента 10 и на управляющий вход передатчика 5. По сигналу дешифратора 24, отключающему триггер 27, запускается одновибратор 25, выходной сигнал которого проходит через элемент ИЛИ 22 и устанавливает счетчик 23 в исходное состояние. При появлении на входе формирователя синхронизирующего сигнала он также проходит через элемент ИЛИ 22 и устанавливает счетчик 23 в исходное состояние.
Работа коммутатора 15, блока 20 преобразователей и блока 21 исполнительных элементов не требует дополнительных пояснений.
По сравнению с прототипом предложенный способ позволяет повысить надежность и оперативность контроля величины допустимого сближения между двумя транспортными средствами за счет обеспечения непрерывного контроля образующихся сочетаний кодов координат их бесконфликтной передачи от некоторого множества транспортных средств.
По сравнению с прототипом предложенное устройство обеспечивает более высокую надежность и оперативность контроля, обусловленную бесконфликтной передачей кодов координат от нескольких одновременно движущихся транспортных средств по каналу связи и непрерывного контроля за образующимися сочетаниями кодов координат.
Технико-экономические преимущества изобретения заключаются в обеспечении возможности надежного и оперативного контроля сближения транспортных средств, что позволяет резко снизить число аварий, повысить производительность транспортного комплекса за счет обеспечения возможности оптимизации параметров движения и существенно облегчить работу операторов, особено в условиях плохой видимости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ приемопередачи информации между подвижными объектами и устройство для его осуществления | 1991 |
|
SU1827679A1 |
| СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ ВЫСОКОВОЛЬТНЫМИ ЯЧЕЙКАМИ РАСПРЕДЕЛИТЕЛЬНОЙ СЕТИ ШАХТЫ | 1990 |
|
RU2037205C1 |
| Способ определения местонахождения шахтеров, попавших в завал | 1990 |
|
SU1789019A3 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2054198C1 |
| УСТРОЙСТВО ПОИСКА СИГНАЛОВ | 2009 |
|
RU2422982C2 |
| МЕХАНИЗМ ТОЛЧКОВОЙ ПОДАЧИ | 1991 |
|
RU2038955C1 |
| Устройство синхронизации в одночастотных многоканальных адресных системах с временным разделением каналов | 1989 |
|
SU1811018A1 |
| Устройство для определения координаты локомотива | 1990 |
|
SU1832093A1 |
| Цифровой анализатор аварийного сигнала | 1982 |
|
SU1018222A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2011 |
|
RU2494006C2 |
Использование: для контроля допустимой величины сближения двух транспортных средств. Сущность изобретения: определяют величину сближения двух транспортных средств по их координатам. Устройство содержит регистры, кольцевой счетчик, блок определения величины сближения, преобразователь сигнала и блок исполнительных элементов. 2 с.п. ф-лы, 5 ил.
| Поезд со вспомогательным лидером | 1984 |
|
SU1524802A3 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
