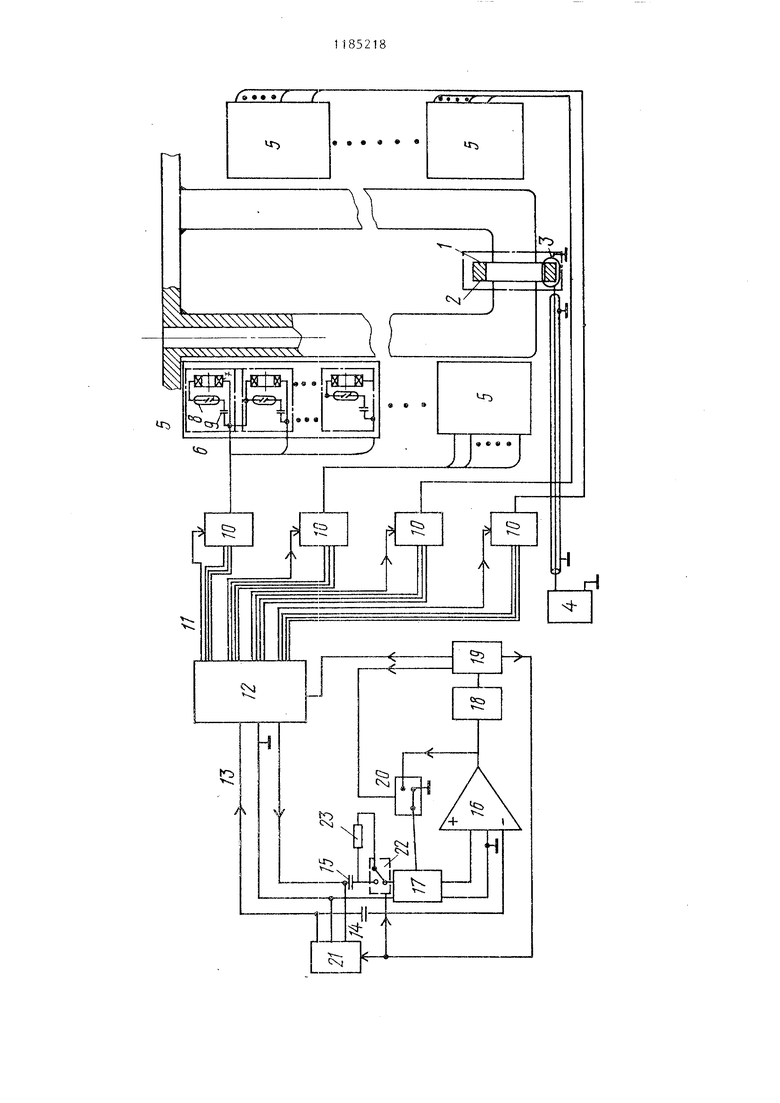
Изобретение относится к Hepaispyшающему контролю и может быть кспольэовано для непрерывного дистанционного контроля трубопроводов 5 полностью или частично входящих в электрически замкнутый контур, наnpiiMep,, трубопроводов энергоблоке АЭС, и яв,ияется усовершенствовс.нием устройства по основному авт.св. № 10Д511 1 . Целью изобретения является повышение надежности контроля. На чертеже представлена структур ная схема устройства. Устройство для дистанционного контроля трубопроводов соссоит из возбудителя 1, представляющего собо зa кнyтый магнитопронод 2 с обмоткой 3, источника ч перемен}1ого тока подключенного к обмотке 3, п блоко 5 измеритель} ых преобразователей, каждый из которьгл состоит из ряда последовательно соединенных измерительных ячеек 6, каждая из которы в СБОЮ очередь, состоит из катушки 7 индуктивности и подсоединенных к ее выводам последовательно соединенньх геркока 8 и шунтирующего кон денсатора 9, причем геркон 8 размещается в нег осредственной близости: от катушки 7 индуктивности. Измерительные ячейки Ь ка;кдого из блоков измерительных преобразователей соед йены с входами соответствующих блоч ных коммутаторов 10, выходы которых соединены через межкоммутаторные линии 11 связи с контактами первой группы общего коммутатора 12. Выход коммутатора 12 через линию 13 связи и разделительные кoндeнcaтop JI 14 и 15 соединяются с одним из входов дифференци шь} ого ус1шителя 16 пепосредственно, а с jipyruM его входо через автокомпеисатор 17. Лиффере} циальный yciuniTejn. 16 nocj;ej.ioBaTer;b JHo соединен с блоком 18 аналого-диф ровой обработки сигнала и ЭР)М 19. Между улравляюищм Вл.гдом автокомпен сатора 17 и выходом диффере}пдиапьно усилителя 16 включен ключ 20, соеди нен.чый своим управляющем входом с управляющим выходом ЭВМ 19, конец линии 13 связи соед;гиен с источником 21 постоянного тока, соединенным своим управляющим входом с другим выходом ЭВМ 19. Между разделительным конденсатором 15 и входом автокомпенсатора 17 включен ключ 22 управляемый теми же сигналами, что и ключ 20, и нагрузочное сопротивление 23, равное по величине сопротивлению катушки 7 индуктивности. Устройство работает следующим образом. Источник 4 переменного тока питает обмотку 3 возбудителя 1, что приводит к возбуждению переменного тока в электрически замкнутом контуре , включающем контролируемый трубопровод. Распределение тока в трубопроводе изменяется под воздействием трещин, образующихся в процессе эксплуатации, что приводит к соответствующим изменениям магнитного поля над внешней поверхностью трубопровода. Процесс измерения упомянутых изменений магнитного поля состоит из двух этапов: предварительной коррек)дии и непосредственно измерений. На первом этапе исключается влияние помех, наведенных на линии связи внешними магнитными полями, на результаты контроля. Для этого катушки 7 индуктивности блока 5 измерительных преобразователей через линии 13,11 связи и коммутаторы 12 и 10 загпгтываются от источника 21 постоянного тока, что достигается по управляющему сигналу ЭВМ 19, поступающему на управляющий вход источника 21 постоянного тока. Магнитное поле упомянутых катушек 7 воздействует на герконы 8, последние замыкаются и через шунтирующие конденсаторы 9 закорачиваирт катушки 7 индуктивности по переменному току. Одновременно а.чтокомпенсатор 17 подключен к линии 13 связи в первой пoзиц и непосредственно, а во второй позиции - через , нагрузочное сопротивление 23. При закорачивании линии 13 связи одновременно вводится нагрузочное сопротивление 23, равное комплексу сопротивления катушки 7 индуктивности. Благодаря этому при шунтировке преобразователя сопротивление нагрузки автокомпенсатора 17 не изменяется. Поэтому в режиме предварительной коррекции достигается только исключепие воздействия линии связи без побочных эффектов, связанных с изменением режима автокомпенсатора, что может привести к дополнительной разбалансировке в режиме измерения. Таким образом, на конце линии 13 связи присутствует напряжение, обусловленное лишь воздействием внешних магнитных полей на линии 11 и 13 связи, напряжения между нулевым проводом и соответствующими сигнальными проводами могут отличаться изза различного электромагнитного взаимодействия последних с внешними магнитными полями. Разность этих напряжений усиливается дифференциальным усилителем 16 и поступает через ключ 20 на управляющий вход автокомпенсатора 17. В результате напряжение, воздействующее на вход дифферен циального усилителя 16, скомпенсируется. При изменении внешних магнит ных полей раскомпенсация будет незначительной, так как берется разность напряжений сигнальных проводов, находящихся в непосредственной близости друг к другу. На втором этапе измерений связь между источником 21 постоянного тока и катушкой 7 индуктивности по команде ЭВМ 19 разрывается. При этом ранее установленное на автокомпенсаторе 17 напряжение не изменится, так как его нагрузочный режим остается неизменным. Напряжение, наведенное в упомя2184нутой катушке индуктивности токами, протекающими по трубопроводу, поступает через линии 11 и 13 связи на вход дифференциального усилителя 16, так как геркон 8 размыкается. Одновременно по команде ЭВМ 19 размыкается и ключ 20, а состояние автокомпенсатора 17 фиксируется. Напряжение, поступающее на вход блока 18 аналого-цифровой обработки сигнала, зависит только от напряжения, наведенного на измерительной катушке 7 индуктивности, так как влияние линий связи исключено на предьщущем этапе коррекции. В блоке 18 аналого-цифровой обработки сигнала измеряются информативные составляющие поступившего на его вход напряжения, которые преобразуются в цифровой вид и поступают на вход ЭВМ 19, где происходит их преобразование и хранение. Затем в соответствии с программой ЭВМ 19 коммутаторы 12 и 10 соединяют линию 13 связи со следующей катушкой 7 индуктивности, выполняется этап коррекции, а затем и этап измерения информации о всех контролируемых участках трубопровода.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕСКОНТАКТНОГО СЕЛЕКТИВНОГО ОБНАРУЖЕНИЯ МЕТАЛЛИЧЕСКИХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ ИМПУЛЬСНО-РЕЗОНАНСНО-ВИХРЕТОКОВОГО МЕТОДА (ВАРИАНТЫ) | 2023 |
|
RU2819826C1 |
| СПОСОБ КОНТРОЛЯ ИСПРАВНОСТИ ЭЛЕКТРОМАГНИТНОГО РАСХОДОМЕРА И ЭЛЕКТРОМАГНИТНЫЙ РАСХОДОМЕР С ФУНКЦИЕЙ САМОКОНТРОЛЯ | 2016 |
|
RU2631012C1 |
| НАЗЕМНЫЙ ДИАГНОСТИЧЕСКИЙ КОНТРОЛЬНО-ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС | 1997 |
|
RU2120876C1 |
| Система регулирования влажности почвы | 1981 |
|
SU1021434A1 |
| Устройство для защиты токопровода от перегрузки по току | 1984 |
|
SU1356096A1 |
| ВЗРЫВНОЙ КОНДЕНСАТОРНЫЙ ПРИБОР | 2014 |
|
RU2571461C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| Устройство сброса кинетического момента и управления ориентацией космического аппарата с использованием магнитной системы | 2022 |
|
RU2797430C1 |
| Генератор импульсов переменной амплитуды | 2017 |
|
RU2647700C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ ТРУБОПРОВОДОВ по авт.св. № 1045111, отличающееся тем, что, с целью повышения надежности контроля, оно снабжено нагрузочным сопротивлением, равным сопротивлению измерительных преобразователей, и управляемьм переключателем, автокомпенсатор подключен к линии связи в первой позиции управляемого переключателя непосредственно, а во второй позиции через нагрузочное сопротивление, управляющий вход переключателя и управляющий вход источника постоянного тока соединены.
| Устройство для дистанционного контроля трубопроводов | 1982 |
|
SU1045111A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
