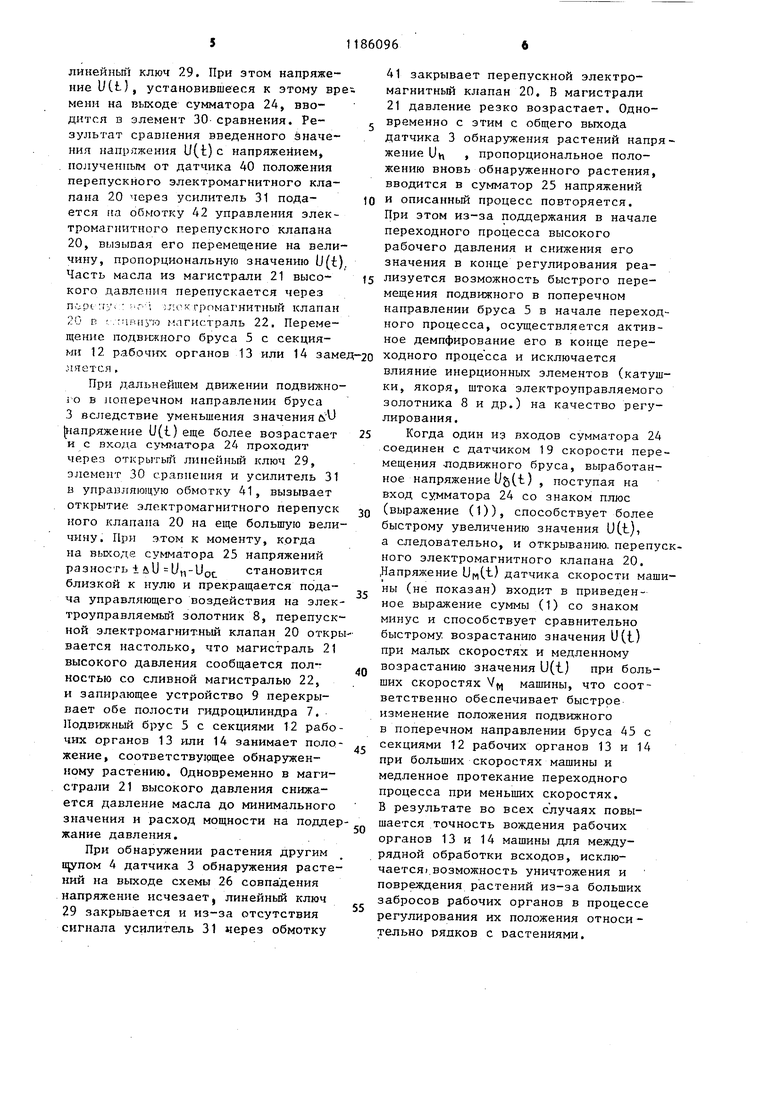
Изобретение относится к сельскому хозяйству, а именно к устройствам для вождения сельскохозяйственных машин для междурядной обработки растений, Целью изобретения являетсй повышение точности вождения машины по междурядьям растений. На чертеже изображена система автоматической корректировки положенин рабочих органов машины для меж дурядной обработки растений. Система имеет неподвижный тяговый брус 1, снабженный сцепным устройством 2 для соединения его с тр;2ктс1;ом (не показан) и датчиком оичаружения растений со шупами 4,подвижный в поперечном направлении брус 5, соединенньй с неподвижным брусом 1 рычажным механизмом 6 гидродилиндром 7, имеющим электроунравляемый золотник 8 с запирающим устройством 9. Обмотка 10 электроуправляемого золотника 8 соединена управляющим усилителем 11, На подви ном брусе 5 размещены секции 12 с рабочими органами 13 и 14 для обработки междурядий и прореживания всходов растений соответственно, Ка дая секция 12 связана с подвижным поперечным брусом 5 с помощью парал лограммной подвески -15, Секции 12 с рабочими органами 13 для обработк междурядий имеют самоустанавливающи ся колеса 16 для копирования рельеф поверхности в вертикальной плоскост а секции с рабочими органами 14 для прореживания всходов растений имеют опорно-приводные колеса 17 для прив да рабочих органов. Кроме того, система снабжена дат чиком 18 положения подвижного бруса 5,датчиком 19 скорости перемещения подвижного бруса 5, датчиком скорос машины (не показан), перепускным электромагнитным клапаном 20, связанным с золотником 8 посредством м гистралей 21 и 22, датчиками 23 положения рабочих органов, количеств которых равно количеству иргпов 4, двумя сумматорами 24 и 25 напряжени схемой 26 совпадения с несколькими элементами типа И 27 по количеству шупов 4 на входе и одним элементом типа ИЛИ 28 на выходе, линейным клю чом 29, элементом 30 уравнения, уси лителем 31, инвертором 32 и двумя , диодами 33 и 34, Датчики 23 положения рабочих органов выполнены в виде -триг геров 35 с раздельными входами, соединенными с герконами 36 - 38, управляемыми магнитом 39, Перепускной электромагнитньй клапан 20 снабжен датчиком 40 положения перепускного электромагнитного клапана 20 и управляется обмоткой 41, связанной с выходом усилителя 31 напряжений. Вход 42 сумматора 24 связан с источником постоянного напряжения (не показан), вход 43 сумматора 24 с датчиком скорости машины. Схема 26 совпадения входами связана с выходами датчиков 23 положения рабочих органов и выходами датчика 3 обнаружения растений. Инвертор 32 соединен с диодом 33последовательно, а с диодом 34параллельно, кроме того, выходы датчика 18 положения подвижного бруса 5 и общий выход датчика 3 обнаружения растений связаны с входом сумматора 25 напряжений, выход которого связан с входом ин- . вертора 32 и с. входом управляющего усилителя 11, Вход сумматора 24 связан с диодами 33 и 34, а выход его связан с первым входом линейного ключа 29, второй вход которого связан со схемой совпадения, Система работает следуюш 1м образом. При движении машины по рядкам растений в произвольный момент времени подвижный в поперечном направлении брус 5 с секциями 12 рабочих органов 13 и 14 занимает некоторое положение относительно рядка растений и поперечного тягового -бруса 1. При этом датчик 18 положения подвижно бруса вырабатывает напряжение UQC , пропорцио- . нальное этому положению. При.касании щупом 4 растения ija соответствующем ему выходе датчика 3 обнаружения растений появляется единичный сигнал, а на общем выходе датчика 3 обнаружения растений появляется напряжение постоянного уровня Уц , пропорциональное порядковому номеру ц -го щупа 4. В сумматоре 25 напряжений напряжение Uf, суммируется, с напряжением Upc с датчика 18 положения 3 подвижного бруса. Результирующее зн чение в виде разности AU U,-Uoc положительного или отрицательного знака с выхода сумматора 25 напряжений через управляющий усилитель 11 подается в обмотки 10 электроуправляемого золотника. 8, сообщающего через запирающее устройство 9 ёоответствующие полости гидроцилиндра 7 с магистралью 21 высокого давления и сливной магистралью 22, Происходит перемещение подвижног в поперечном направлении бруса 5. с секциями 12 рабочих органов 13 и 14, которое продолжается до тех пор, пока на выходе сумматора 25 напряжение значения напряжения не станет незначительно малым вследствие изменения его значения на выходе датчика 18 положения подвижного бруса. При перемещении рабочих органов 13 или 14 до положения, соответствующего координатам обнаруженного растения, значение напряжения Uoc становится равным значению напряжения Он и перемещение подвижного в поперечном направлении бруса 5 прекращается. Время регулирования tp имеет ра личную по величине продолжительност соответственно при различных по величине отклонения дУ обнаруженных растений от фактического положения рабочих органов 13 или 14. При зтом для исключения во всех случаях повреждений обрабатываемых растений датчик 3 обнаружения растений долже быть вынесен на значительное расстояние вперед от рабочих органов 13 и 14 или машина должна иметь небольшую поступательную скорость. При касании одного из шупов 4 растения в цепи управления перепуск ным электромагнитным клапаном 20 появляется единичное напряжение на соответствующем входе элемента типа И 26 схемы 26 совпадения. С общего выхода датчика 3 обнаружения растений значения напряженияU по-прежнему вводится в сумматор 25 напряжений для определения величины разности амплитуд ±&U UY,-Uoc Величина же t (J , проходя по цепи управляющего усилителя 11 и обмотки 10 электроуправляемого золотника 8, вызывает перемещение подвижного бру са 5 с секциями 12 рабочих органов 13 или 14 посредством гидроцилиндра 64 7. Одновременно при помощи инвертора 32 и диодов 33 и 34 из возможных значений ± uU вьщеляется сигнал одной полярности (при указанных на чертеже положениях диодов 33 и 34 в сумматор 24 вводится напряжение со знаком плюс). Перемещение подвижного груза 5 вызывает уменьшение модуля лиС). 6 сумматоре 24 эта величина суммируется с напряжениями UoH(-t), U8fCt),UM(t)cooTBeTCTBeHHo определяемыми в масштабе.максимальной величины открытия клапана 20, скоростью V§(t) перемещения подвижного бруса 5 и скоростью ) перемещения машины вдоль рядков растений. В результате на выходе сумматора 24 формируется напряжение uCti-UoHtO Ugai-LuKO UMCt) Ci) возрастающее во времени при движении подвижного бруса 5 в любом направлении. Рассмотрим U(t) UoH(.t)-uUlt) U) При больших значениях лУ , соответствующих большому отклонению рабочих органов 13 или 14 от обнаруженного растения, может 6biTb&U Uou и значение . Значение U(t) соответствует закрытому состоянию электроуправляемого перепускного клапана 20. Дальнейшее движение подвижногд бруса 5 вызьтает уменьшение значения uU настолько, что значение напряжения U (t) становится положительным и линейно возрастает. При движении подвижного бруса 5 жестко связанный с ним магнит 39 также перемещается, замыкая последовательно герконы 36 - 38, установленные на входах триггеров 35 датчика 23 положения рабочих органов. При этом триггеры 35 переходят в единичное состояние, когда замыкается геркон типа 37, и на выходе устанавливается нулевое напряжение, когда замыкаются герконы 37 или 38 триггера 35. В момент совпадения на входе одного из элементов типа И 27 единичного сигнала триггера 35 одного из датчиков 23 положения рабочих органов с сигналом соответствующего единичного выхода датчика 3 обнаружения растений на выходе элемента 26 совпадения появляется напряжение, которое открьшает линейный ключ 29. При этом напряжение U(t), установившееся к этому вре манн на выходе сумматора 24, вводится в элемент 30-сравнения. Результат сравнения введенного значения напряжения U(t)с напряжением, полученным от датчика 40 положения перепускного электромагнитного клапана 20 через усилитель 31 подается на обмотку 42 управления электромагнитного перепускного клапана 20, вызывая его перемещение на величину, пропорциональную значению lJ(t) Часть масла из магистрали 21 высокого давления перепускается через n,ipt :г;,; : Г- ;ЛС:г громагнитный клапан 20 в г, : irtny o магистраль 22, Перемещение подвижного бруса 5 с секциями 12 рабочих органов 13 или 14 зам ляется, При дальнейшем движении ПОДВРГЖНО го в поперечном направлении бруса 3 вследствие уменьшения значения &U шпряжение U(t)еще более возрастает и с входа сумматора 24 проходит через открытый линейный ключ 29, элемент 30 срапнения и усилитель 31 в управляющую обмотку 41, вызывает открытие электромагнитного перепуск ного клапана 20 на еще большую вели чину. При этом к моменту, когда на выходе сумматора 25 напряжений разность ± лУ Uf)-Uo{ становится близкой к нулю и прекращается подача управляющего воздействия на элек троуправляемый золотник 8, перепуск ной электромагнитный клапан 20 откр вается настолько, что магистраль 21 высокого давления сообщается полностью со сливной магистралью 22, и запирающее устройство 9 перекрывает обе полости гидроцилиндра 7, Подвижный брус 5 с секциями 12 рабо чих органов 13 или 14 занимает поло жение, соответствующее обнаруженному растению. Одновременно в магистрали 21 высокого давления снижается давление масла до минимального значения и расход мощности на подде жание давления. При обнаружении растения другим njynoM 4 датчика 3 обнаружения расте ний на выходе схемы 26 совпадения напряжение исчезает, линейный ключ 29 закрьтается и из-за отсутствия сигнала усилитель 31 через обмотку 41 закрывает перепускной электромагнитный клапан 20, В магистрали 21 давление резко возрастает. Одновременно с этим с общего выхода датчика 3 обнаружения растений напряжение DH , пропорциональное положению вновь обнаруженного растения, вводится в сумматор 25 напряжений и описанный процесс повторяется. При этом из-за поддержания в начале переходного процесса высокого рабочего давления и снижения его значения в конце регулирования реализуется возможность быстрого перемещения подвижного в поперечном направлении бруса 5 в начале переходного процесса, осуществляется активное демпфирование его в конце переходного процесса и исключается влияние инерционных элементов (катушки, якоря, штока электроуправляемого золотника 8 и др.) на качество регулирования. Когда один из входов сумматора 24 соединен с датчиком 19 скорости перемещения лодвижного бруса, выработанное напряжение Ugi) , поступая на вход сумматора 24 со знаком плюс (выражение (1)), способствует более быстрому увеличению значения U(t), а следовательно, и открыванию, перепускного электромагнитного клапана 20. .Напряжение Uf(t) датчика скорости машины (не показан) входит в приведенное выражение суммы (1) со знаком минус и способствует сравнительно быстрому возрастанию значения U(t) при малых скоростях и медленному возрастанию значения U(t) при больших скоростях V(n машины, что соответственно обеспечивает быстрое изменение положения подвижного в поперечном направлении бруса 45 с секциями 12 рабочих органов 13 и 14 при больших скоростях машины и медленное протекание переходного процесса при меньших скоростях. В результате во всех случаях повышается точность вождения рабочих органов 13 и 14 машины для междурядной обработки всходов, исключается).возможность уничтожения и повреждения растений из-за больших забросов рабочих органов в процессе регулирования их положения относительно рядков с растениями.
2
Us(t)
) 4J
2
«4 V rWSW-riTf
5
rl I-1I r 1
SJff
.
uai . N
2T26
28 27 I I
h
/ или
и
1. СИСТЕМА АВТОМАТИЧЕСКОЙ КОРРЕКТИРОВКИ ПОЛОЖЕНИЯ РАБОЧИХ ОРГАНОВ МАШИНЫ ДЛЯ МЕ)КДУРЯДНОЙ ОБРАБОТКИ РАСТЕНИЙ, содержащая неподвижный тяговый брус с датчиком обнаружения растений и подвижный в поперечном направлении брус с рабочими органами, соединенный с неподвижным брусом рычажным механизмом и гидроцилиндром, имеющим электроуправляемый золотник, обмотка которого соединена с управляющим усилителем, датчик положения подвижного бруса и датчик скорости машины, отличающаяся тем, что, с целью повышения точности вождения машины по междурядьям растений, система снабжена перепускным электромагнитным клапаном, связанным с золотником, датчиками положения рабочих органов, датчиком скорости перемещения ПОДВ1-ШНОГО бруса, первым сумматором напряжений, схемой совпадения, входы которой связаны с выходами датчиков положения рабочих органов и выходами датчика обнаружения растений, линейным ключом и усилителем, выход которого связан с обмоткой перепускного электромагнитного клапана, инвертором, двумя диодами и вторым сумматором напряжений, при этом инвертор соединен с одним диодом последовательно, а второй - с ними параллельно, кроме того, выход датчика положения подвижного бруса и общий выход датчика обнаружения растений соединены с входами второго сумматора напряжений, выход которого связан с входом инвертора и с входом управляющего усилителя, причем вход первого сум(Q матора напряжений связан с диодами, (Л а выход его - с первым входом линейного ключа, второй вход которого связан с схемой совпадения, а выход его - с входом усилителя. 2.Система по п. 1, отличающая ся тем, что она снабжена соединенной с входом усилителя 00 схемой сравнения и датчиком положео ния перепускного электромагнитного клапана, который соединен с элемено том сравнения. 05 3.Система по п. 1, отличающаяся тем, что она снабжена установленным на подвижном брусе датчиком скорости, выход которого соединен с входом сумматора напряжений. 4.Система по пп.1,2 и 3, о т л ичающая ся тем, что датчик скорости машины соединен с сумматором напряжений.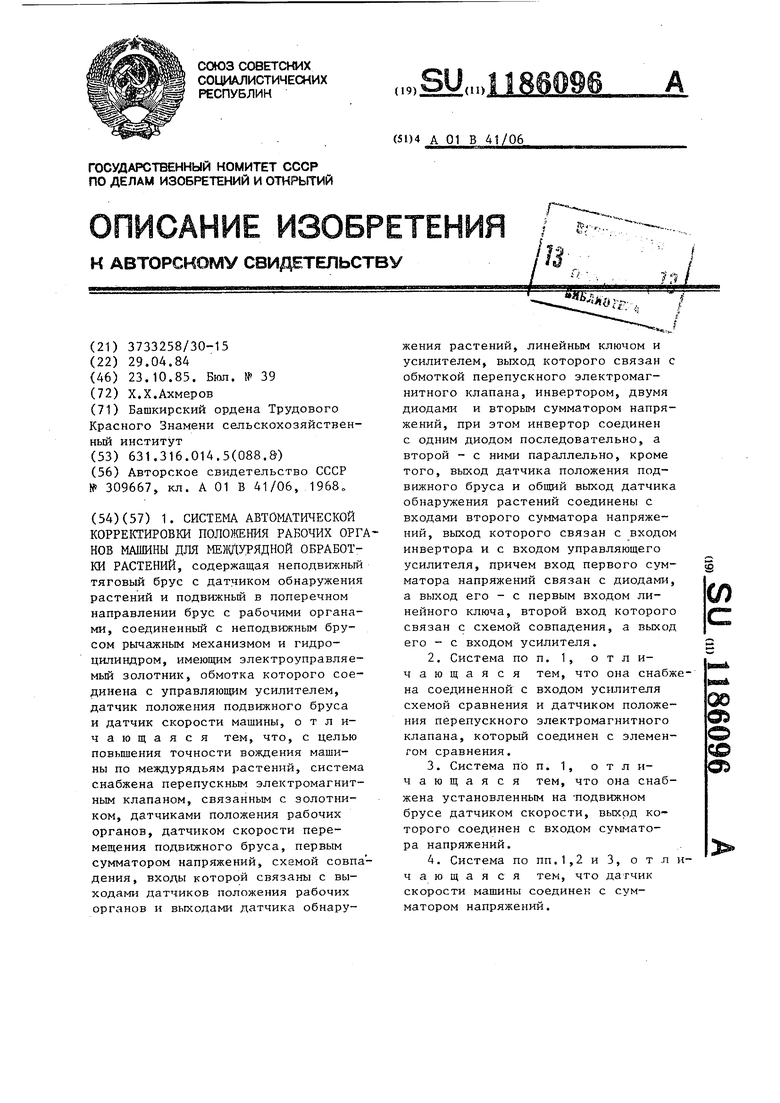
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАВЕСНЫМ КУЛЬТИВАТОРОМ12 | 0 |
|
SU309667A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
