коетп и он()р}1О-н И1В(ДЦ1)1е кодеса 10 привода, )а()оч11 opi a.HCHi.
(:1еди рабочих ()р1Д1нов 6 и |;ад рядком расгепи; v e raiioii. ieiibi П чатчнка
12об: а П Жечия paeTCin ii, KOTo;)i,iii имеет
ныход|,1 а. б, в соотвстс1ч енн;; цс; числу
щупов I и обиип виход с нреобранова- T(:ieM с :гналов. i 1осде обнаружеи)1Я каким- либо туном 1 1 раеч ений ца еоо-:тк тетвук - шем 15ЫХ()Д иояв.пяется и цоддерживаетея Hoe i OHiiH(e но урогдио, соотв,ет; тв чо1ЧлЧ ; 1 наирян ецне, а на обч1ем «ыходе iipe()6:ia- зоваи ;ое зиачеиие I ,,, ео()твететвук)И1ее н;; ампд1ггуде порядковому помер н HiN Ha П.
Обнип: выхол, дагчика 12 обпару/кения р/1сгечий нодк;ноч(Д1 к од|-ому из входов еум- маг ора 13. ;1. сгой вход когорого езязан i, .м.атчиком нодожепия ;;одвижди:)1Ч) д,атчико ; i 4 обратной связи (ДОС;), Пскулед- ний предназначен дли в1)1раба 1Т|1вапия ц;;нр - жепия I . |;ронооционад1.1И) чодоженик; )Ого 4.
Вьичод еуммато 1а 13 через У1Ч1ли е,гь If) eocyiHireii е -(лсччтроунрав-тяемым зо.ютииком ;(), 111)(Д1назна енн1 1м для yiipaiiieHHSi через за ира:оз еч с гзогд т во 7 гидро 1и; ин,ч- ром 18. В магис тра.:1И 19 высоким ..yaic к ния ус1 аковден дс:зирую1ци 1 кдацаи 20. y;ipaBJiHeMbiii эдектронринодом 21. При; о :крв1- ваиии кданан 20 соедипяет магиетрадь Ю BbieoKOi o давления со c, niBi;(;ii .viarnc i jja. ibio 22. Для (ыделения модудя Д1 из р;).(ст11 амнлитул. ± r lJr L . выхо;1 eyMivaropa
13соединен е KHBCPTOJIOM 23 н диодами 24 и 25.
После обнаружения очередного раетения ддя за110мцнан1 Я значения Л1J отк, К)||ечия
0
0
э
0
И -111 еоед.1 Нен1)И Для включения зьичлю- фотодио.тов 38 к :(ав1;еимоети от ,io- . Ке-чтя р1абочих opraHOii (i и 7 цре. :чч1 исг( 42 eBC ia. (ни;: е ; одвиж- .)1М 6pveoM 4.
Ддя введения задани):х ипоме- жут.)чн1,1х KOOI) и1чат ;|)О1)мир()вания )ex(д; 1 1(
:i)ix нроцессов 15 - ависИ|МОСТИ о : юойдсн- идч. нх тн еиетема енаб/кепа з;1Д,атчиком 4i5 програ vi мьи |ри э1Ч)м ;ь1Я хч тачовки iiiaae- координат 1;)О раммь нро1 оодиона. И)- 1о е, 1учайн()й едичи1;е Ь OTi ;iuiiei 44 обна)уж(Ч1НО:() |)аете;1ия задатчик 44 K(J- ордчнат д чюлнеч в зид( .е. 1итедеи панряжения на резисторах К , If R п
подключен к зв1ходу заномипаюнич о ч т:нп - ства 2(). 11одвижн1)1е хочгактв ;;.С Дите.еи у; ачав. шзаю гея laK. ч : на наралле. ;ьН; 1Х .а R:. ;;, .., R, фо}) 1:а:1ря- . равппч . пан1)имер. коо) )Й i 1 i:i . 1({)И|У 2) И|)И . 2 , I
:, |; черееече 1ия вер1Ч1калв ;ых .
1 . 2 i i Kiiniscii I i -.:л при ; - I ;. При
-.| (.м измеп(Ч1ие ;Ходно1 (; напряжения задат- 1-1 ко(;рд1;|;ат 1....--.М :(--, 11, ... 1 и{| iHoTiii T по. Л ч; II) па его вь ходе наиряже- пис ( t 1.2. . Д . 1)п;ч ,е.. ivii in. :.; - IU44 гвечч.1 значения коорл.ииат нереходн1хх ;1род(чч оз систеув нронорн.г онад :,но /laП| я,-К1ч;иям .Л1.1,:: , ИV l. yvn анавдивае 11ЧУ1 иа выходе заномина1ои1,) уст;) 26 в wiiUiciiMoeTH o l .у.Учайнои ве. дддлны от к, I о не ни я oбнap Жcчцoгo pacTi ния.
)И любом , 1, П, ..., V Д, ;Я НОСЛС.1)в;|Т(. iaioi-Q введения этих координат з зави- спм с и (гг п Г) (Ж денно О НУТ и в t и с гсме нгд. д смотрены датчик 45 импульсов lyin (ДИН), 1фисоедннснн1)1Й к мерному колесу 46, и счетчик 47 прййдеиного пути. Последний своим счетным входом С связан с датчиком 46 импульсов пути, другие его входы (S н R - «Счет и «Возврат в исходное положение) соединены с формирователем 29 импульсов, а выходы связаны с ключами Ki, Ка ... К, коммутатора 48 сигналов. Выход последнего связан с одним из входов элемента 49 сравнения, другой вход которого связан с общей точкой соединения диодов 24 и 25, а выход -- с одним из входов сумматора 30 напряжений.
Система работает следующим образом.
При движении мащины но рядкам растений в произвольный момент времени подвижный брус 4 с секциями 5 рабочих органов 6 и 7 занимает некоторое положение относительно рядка растений и поперечного тягового бруса 1. При этом датчик 14 обратной связи выдает напряжение - Uoc, пронорпиональное этому положению. Соприкосновение растения с каким-либо из шупов
11датчика 12 обнаружения растений вызывает появление на выходе соответствующего канала единичного напряжения, а на об- Н1ем выходенапряжения постоянного уровня и„, преобразованного пропорционально порядковому номеру и щупа 11.
В сумматоре 13 напряжение U,, датчика
12обнаружения растений суммируется с напряжением Uni датчика 14 обратной связи. Результи)уюн1ее значение в виде разности ,,-- положительного или отрицательно1 о знака с выхода су.мматора
13через усилитель 15 подается в одну из обмоток электроуправляемого золотника 16, сообщая через запирающее устройство 17 соответствующие полости гидроцилиндра 18 с магистралью 19 высокого давления и сливной магистралью 22. Происходит перемещение подвижного бруса 4 с секциями 5 рабочих органов 6 и 7, которое продолжается до тех гюр, пока на выходе сумматора 13 напряжение не становится малым, вследствие изменения его значения на выходе датчика 14 обратной связи. Когда значение ±AU у.меныпается , рабочие органы 6 и 7 занимают соответствующие координатам обнаруженного растения положения в поперечной плоскости, т. е. цепочка все время работает на компенсацию отклонений AU обнаруженных растений от фактического положения рабочих органов 6 и 7.
При введенной цепи управления клапаном 20 в моменты соприкосновения щупа 11 с очередным растением одновременно при помощи инвертора 23 и диодов 24 и 25 из возможных значений ±AU выделяется только сигнал одной полярности (при указанных на фиг. 1 положениях диодов 24 и 25 в сумматор 30 вводится напряжение со знаком +). В моменты обнаружения очередного растения значение AU вводится в запоминающее
0
5
0
5
0
5
0
5
0
5
устройство 26 при замыкании н размы1 а11ии ключа 28 от формирователя 29 импульсов, ( игна. с выхода запоминаюп1е1Ч) ycTpoii- ства 26 вводится в сумматор 30, IMC осуществляется с ммирование с учетом знаков liccx введенных значений нанряжений. Внача,-1е на выходе сумматора 30 напряжение I ,(). Такое значение О,, соответствует закрытому состоянию перепускного дозирующего клана- на 20 (максимальный расход масла из магистрали 19 высокого давления через зо, 1от- ник 16 и запирающее устройство 17 в но- лость гидроцилиндра 18). При этом осуществляются троганис и разгон подвижно1-о бруса 4 с рабочими органами 6 и 7.
В моменты обнаружения очередного растения значение Д1. с выхода запоминающего устройства 26 вводится в задатчик 43 программы. На выходе дс.тителей на резисторах RI, R2, ..., R, задатчика-44 координат формируются напряжения L -.... ( 1,2, ...,i), пропорциональные по величине значению ли, введенному в запомннаюп1сс ст- ройство 26. В момент обнаружения растения импульсам фор.мироватсля 29 имну.пь- сов счетчик 47 пройденного нут,( 1и)зв)а- щ.ается в исходное положс1-1пе (сброс на «О по входу R) н запускается на счет импул)- сов, формируемых датчиком 45 им11у,1ьсои пути, связанным с мерным колесом 46. Начинается измерение д.тины интерва, 1а от обнаруженного растения. Hpis этом сигна, 1ы с выхода счетчика 47 вводятся в коммуга- тор 48 сигналов и открывают носледовате.тьно Ki. Кз К. Значения координат
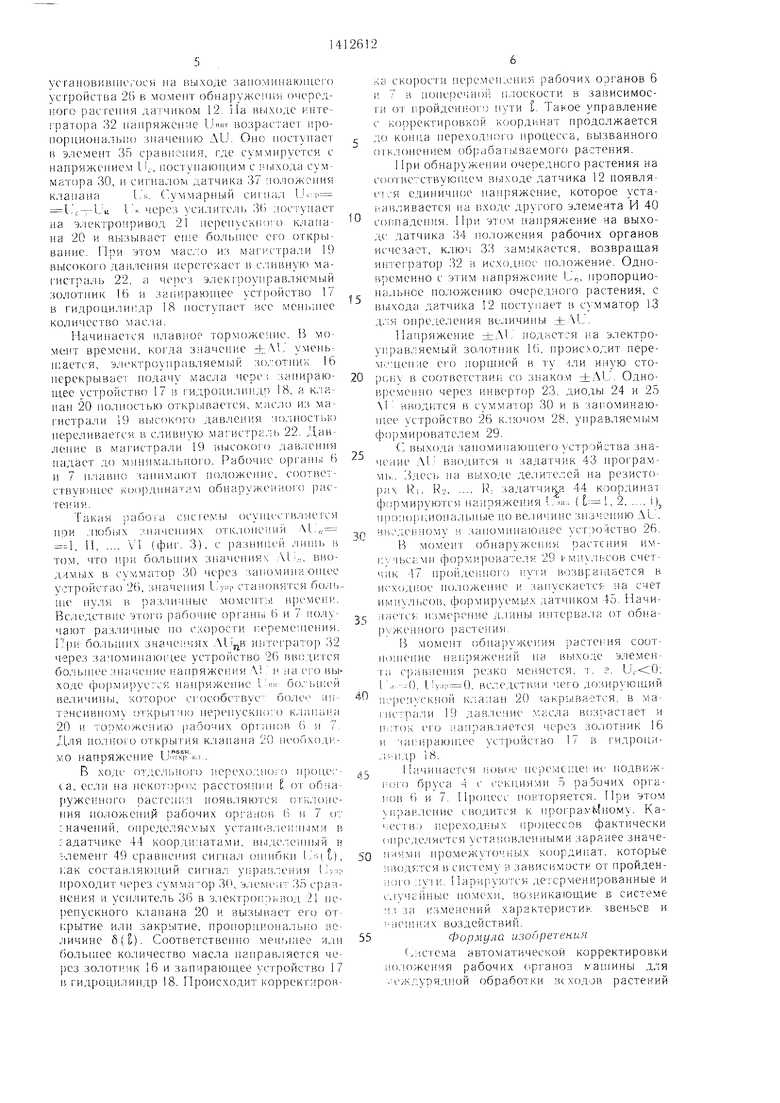
U.KLUIO мере движения ман1ины (t 1, 2 ц
вводятся последовательно в э, 1е.мент 49 сравнения. Здесь опредсмястся с)Н1нбка L i (фиг. 2). отк,1оненпй фактнчески.х значени коордннаг переходного процесса от заданных программой , 1СН1 я (в задатчпкс 44 координат) и вв{)Д1-:мых в зависшюсти от пройденного пути.
По мере движения но.) )уса -1 ita выходе cyMNUiTOpa 13 зн.ачснис ±.1 уменьп ается. При этом умснынастся и значение ли, вводимое через и 1вертор 23 и диоды 24 и 25 в с ммат(.)р 30. В рез льтате на выходе его 1-:апряженис растет и становиг- ся больше нуля, т. е. Г,0. Это напряжение через э,1емент 35 сравнения н уси, 1пте, 1Ь 3() проходит на э,1ектропрпвод 21 пс НМ1ускн01Ч) дозирующего клапана 20. Начинается дозированный перепуск .мас, 1а из магистра,in 19 высокого дав,1е1-:1 Я в с,1ивнук) ма™стра,1ь 22.
При да, 1ьнейн1ем движении подвижного бруса 4 на выходе датчика 34 11О, 1Ожения рабочих органов появляется напряжение из-за переключения одного из триггеров 39 и совпадения сигналов на входе фотодиода 38 от источника 42 света, жестко связанного с подвижным брусом 4. Это напряженне размыкает к, 1юч 33, и интегратор 32 включа- етея на интегрирование нанряжения .Г,
усганоЕзившегося на выходе запоминающего усгройс гва 26 в момент обнаружения очсред- 1К)го растения датчиком 12. Яа ныходе иите- 1-рато1)а 32 напряжение Umrr возрастает иро- норци) значению ALJ. Оно ностуиает в элемент 35 сраннения, где еуммируетси с иапряжеиием I ;, иостунакмдим с ()да сумматора 30, и сигна.том датчика 37 положеиия
клананаLK.
1,--1- ч I к через уеи.титель 3fJ лостулает на э;1ектрО 1риво;1 21 11еренуекно;ч) клаиа- иа 20 и вызывает CHie бсхпыиее его откры- ваиие. П|)и атом мас/Д) из )али 19 BbicoKoi o давления перетекает в с.чинную ма- 1Л1ст раль 22, а черс з элекгроуправлнемый золотник 16 и зан -;раюи1ее )йство 17 в гидроци,ли1:др 18 ноступает все мен1зИ1ее количество мае.т а.
Начинается плавное торможение. В момент времени, когда значение ±:AL умеив- И1ается, электроунрав.тяемый з( :отиик 16 перекрывает иодачу масла чере ; 1цее устройетво 17 в гидродилиндг; 18, а к.ла- иан 20 нолноетью откр1.1вается, масло из магистрали 19 BBicfiKoro дав.чеипя чо.чиостыо переливается в, с.чинную магистра.чь 22. Дав- лс иие в магисч рали 19 нысоко- о давления надает до минима... Рабочие oprani)i В и 7 и.ча1И1о занимают иоложение, соответствую Hiee коор-.чинатам обиаруж.енногс рас- т еиия.
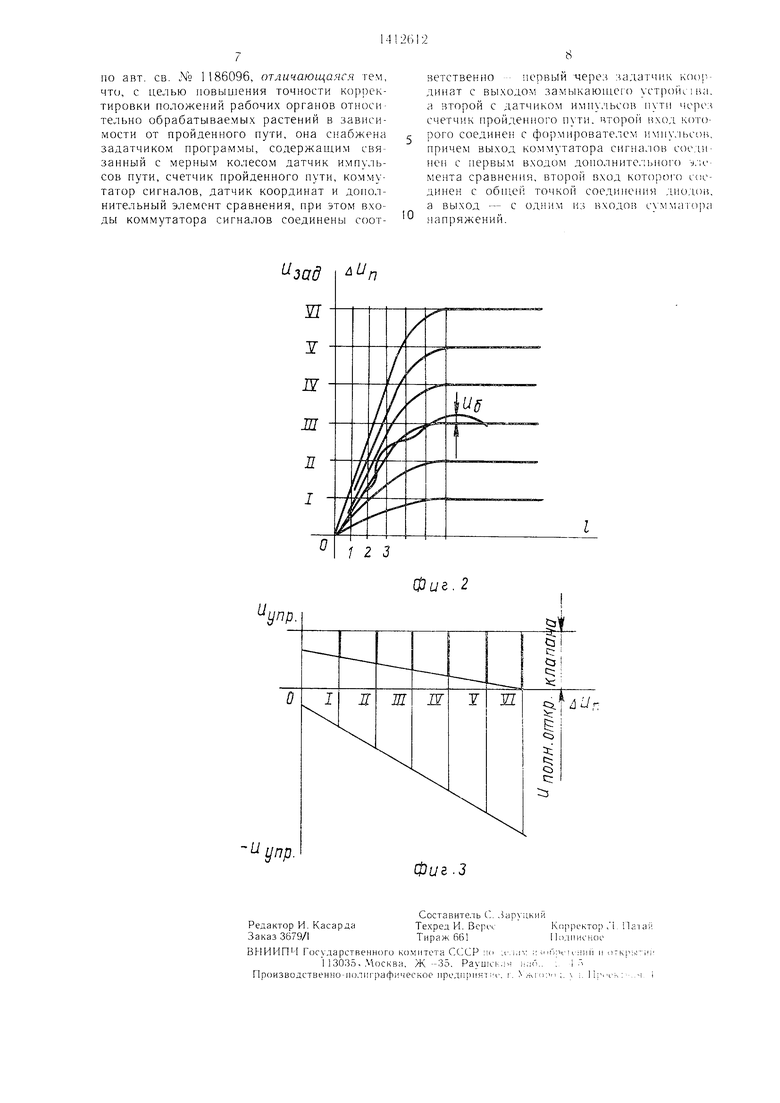
1 акаи CHCICMBI осу1нествлме гея иои ;iio5i ix значениях (.ггклоисяий Л1.
1, И Vi (фиг. 3), с разницей лини, в
том, что при бо.чвших зиаченияк М ;,. вводимых в сумматор 30 через заномииа мнее уст ройстно 2(), значения l,y:i: стагювяч ся боль те нуля в раз.чичные момеит;). времепг:. Веледствие эч ого рабочие opi aHi,i tJ и 7 1О,чу- чают различные но )JOCTH перемеч1ения. бо.чьших значе иях .М jjB шггегратор 32 через зaчoминaюг ee устройетво 2(i во.тгп ея бо.чынее значение напряжения ходе (ро)мируе: ся нанряжение I ве.тичины, которое сг-(кч)бствуе тйисивиому откр1 г ию HejieiiycKii 20 н топможению рабочих opi ,ля U).:ib:oro открытн:я кланаиа 2( иеобход -- лю напряжение IJ °KT K.I .
В ходс отделыюг) переходного ироцес- ta, если на HC4 t;Top(i:-v: раеетоянин , от обна- |уженно1Ч) раст еиия нояв;1яютея от;;.лоие- ния положений )абочих органо-в (; и 7 от ;начений, оиределяемвьх устаион..1ми в :-адатчике 44 координатами, 1и,:де.-;е1Н1ый н элемент 49 сравнения еи1Л1ал (.пиибки ..lt. |, как состав.тяюший еи1Л1ал упра. ;ения L y:i:. проходит через сумма- Ор 3(К э.лемен г 35 сраннения и уеилителв 36 в электроноивол. 21 перепускного кланана 20 и вызывает его открытие или закрытие, пронордиона-лы-ю неличине 6 { ). Соответетвешю меньшее или Г)одьн1ее количество масла направляется через золот1 ик 16 и запирающее устройство 17 в гидроцилиидр 18, Происходит корректиров
0
5
ка екорости неремеи.сния рабочих озганов 6 i 7 i iioHei c4}H)i ; н..лоскости в зависимости ОТ Г ройден1 ог) нути L. Такое управление с кор)ектировкой к(;ординат продолжается до KOfiiia нepex(JДЧoгo процесса, Е;ызванно|-о отк,лонением об ;абатываемо1Ч) растения.
При обнаружении очередного раетения на соответствуюн1ем выходе датчика 12 появля- е.дипичн(;е нап 1яжеиие, которое уста- авливается iia входе )го эле1 лента И 40 сог;палення. При нанряже1-1ие ка выхо-- ;,( датчика юложения рабочих органов исчезает, к.тюч 33 замыкается, возвращая и1П ег ратор 32 , исх()дг:ое исх.южение. Одпо- iipc-менно с этнм напряжение IJr;, пропорциональное положению очередио1Ю растения, с выхода датчика 12 ноступает в сумматор 13 для определения величины .
1 апряже11не ±Л1. нол ается на электро- ун|5авляемый зо.чотник Ki, происходит пере- м.. дтсн;1е его поршней в ту тли И1-1ую ето- рону в соответствие со 3ijaKOM ±AU. Одно- в)еменио через инвертор 23.. диоды 24 н 25 М нводитея li суммало) 30 и в запоминающее усч ройство 26 к. почом 28, уиравляемым фо1:1МИ)ователем 29.
( выхода заиомимающегч) Х стройст ва значение Л1 15.нодится в задат чнк 43 програм- М1).. Зд.есь на выходе де,чнтелей па резисторах , Rv Г,. задатчика 44 коор;1ипат
(}к;рмируются нанряже1 ия L:ia;; (Е,: , 2i )
)иионал1)Иые но ве.чи .дше значению .. Hiv: TeiiHOM м заноминающее ует оолство 26. Р) .момен.ч обпа|)ужснн,я рас тсния им- 1; чьс;;ми (к)рмнр015ате.л.я 29 1-ми чьсов счетчик 47 нройде1;нс)1-() нути возв ;а1аается в исход1 ое иоложение и зануекае1-с5: ма счет импульсов, (Ьормпруемых датчиком 45. Пачи- лается измерение длины и ггерва. 1а от обна- р Женно1 0 растения.
В момент обнару ке1 яя ;;)асте1Д1я соот- юик ние нан)яженнй на Bbixo. ie элемента сравиеиня 1езко меняелтя, т. . IJ;-- 0; Ги--0. (), веледст15ии чего дозпр ло1ций по|) г лапан 20 - .акрывается, в .ма- истра.чи И) дав. 1ени( масла возрастает и ГОК ) ; аирав.чяется через зо;1отиик 16 загираюии с уелрюйство 17 в гидроци- пдр 18.
Пачипаелч я новое неремсще ие нодвиж- гс Го б)уеа 4 с секциями 5 рабочих :ов 6 и 7. Процесс нсиггоряется. При этом . н;)анление сводится к iipoi paytvliiOMy. Ка- чесл в:) не)еходь:ых процессов фактически онрел.е.ляется устан(1влен1Ц;1ми заранее значе- , 0 HHViMH н)Омежуто -Г1-:ых координат, которые знодяггея вспе 1ч му н зависимости ол пройден- iioro Парируюл ся детерменнрованные и случайные помехи, возлликаЮ Щие в системе м . за, (изменений характеристик звеньев и ; воздействий. 5Формула изооретения
(.мете.ма автомат и ч ее кой корректировки положения рабочих органов машины для . еждурял. обработки -к ходов растений
5
0
5
по авт. св. MO 1186096, отличающаяся тем, что, с целью повышения точности корректировки положений рабочих органов относи тельно обрабатываемых растений в зависимости от пройденного пути, она снабжена задатчиком программы, содержащим связанный с мерным колесом датчик импульсов пути, счетчик пройденного пути, коммутатор сигналов, датчик координат и дополнительный элемент сравнения, при этом в.хо- ды коммутатора сигналов соединены соот
ветственно - первым через задатчик KOOJI- дипат с выходом замыкаю1пего устро(к-1 lia. а второй с датчиком имну.чьоов пути через счетчик пройдеппого пути, ivropoi i вход которого соединен с формирователем импульсов, причем выход коммутатора сигналов соединен с первым входом дополните. ibnoi o y. ie- мента сравнения, второй вход которого с(с- динен с общей точкой соединения . щодои. а выход - с од}1им из входов сх мматора напряжений.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматической корректировки положения рабочих органов машины для междурядной обработки всходов растений | 1984 |
|
SU1303054A2 |
| Система автоматической корректировки положения рабочих органов машины для междурядной обработки растений | 1984 |
|
SU1186096A1 |
| Устройство для согласования работы системы вентиляции и генератора углекислого газа в теплице | 1988 |
|
SU1530141A1 |
| Система управления автоматическимпРОРЕжиВАТЕлЕМ КульТуРНыХ РАСТЕНий | 1979 |
|
SU843794A1 |
| Устройство для управления рабочим органом бульдозера | 1980 |
|
SU941503A1 |
| Устройство автоматического контроля глубины хода рабочих органов сельскохозяйственных машин и орудий | 1986 |
|
SU1329646A1 |
| Способ регулирования теплофикационной паротурбинной установки | 1984 |
|
SU1195018A1 |
| Система автоматического управления очистным комбайном в профиле пласта | 1986 |
|
SU1423738A1 |
| Устройство для контроля рабочих органов сельскохозяйственной уборочной машины | 1987 |
|
SU1519564A1 |
| Электропривод постоянного тока | 1976 |
|
SU657554A1 |
Изобретение относится к сельско.хозяй- ствеипому машиностроению. Це, 1Ь изобретения -- новьинение точности корректировки положений рабочих органов относител1)ИО обрабатывае п 1х растений в зависимости от пройденного пути. Устройство содержит тяговый брус 1, на котором посредством шарнирного р1з1чажного механизма 3 закреи.теи ружения растении. ,Татчик Н обратно связи яв, яется и дaтчикo i и),1оже; ия Ui,i- вижного бруса 4. Сумматор 13 через усил11- тель 15 соединен с члсктро прав, 1яем1)1м ;;;|- .ютником 16. Золотник через заш-раюшс-е устройство 17соеди11 ен с гидроци,1индр()м Дозируюиип клапан 20 т1равляется ч.1сктр - ;1)ивод(п 21. Заиомина1ОН1ее ч стройствс 2ti ф11КС1 руст отк юнсние обнаруженно Ч) Piicn - ния от иреды;1ун1его. С це,) ,Ч):;а ния , ia, и}К)11Орииональн() C ii Ha,:. характериз ЮИ1ем ве,1ичин от к.; о MCI-;; я. формируется сигна, на TO) 1И);и-.;-.,.:ч- ного бруса 4. Задатчик 43 11рогра :мы Oii--- мируст сигна, 1ы, х странякинис .южные ci ::- на,11)1 о на,1нч11и KiCTCHHii, и,-1и .. связанные с Г1е11еходны%1и HiioucccaMi-; в vXCN4-. Hii. iHiOTCH возбуднтеля 1-; . дмх хУ ч c|ni6; TbiBai-:iiii системы. 3 и,. ssat
1 2 3
Фиг.2
Фи. -3
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
