Изобретение относится к сельскохозяйственному машиностроеиню, в частности к автоматическим устройствам лля вождения рабочих органов при междурядной обработке всходов растений.
Цель изобретения - повнлшение точности вождения за счет учета инерционности подвижных масс.
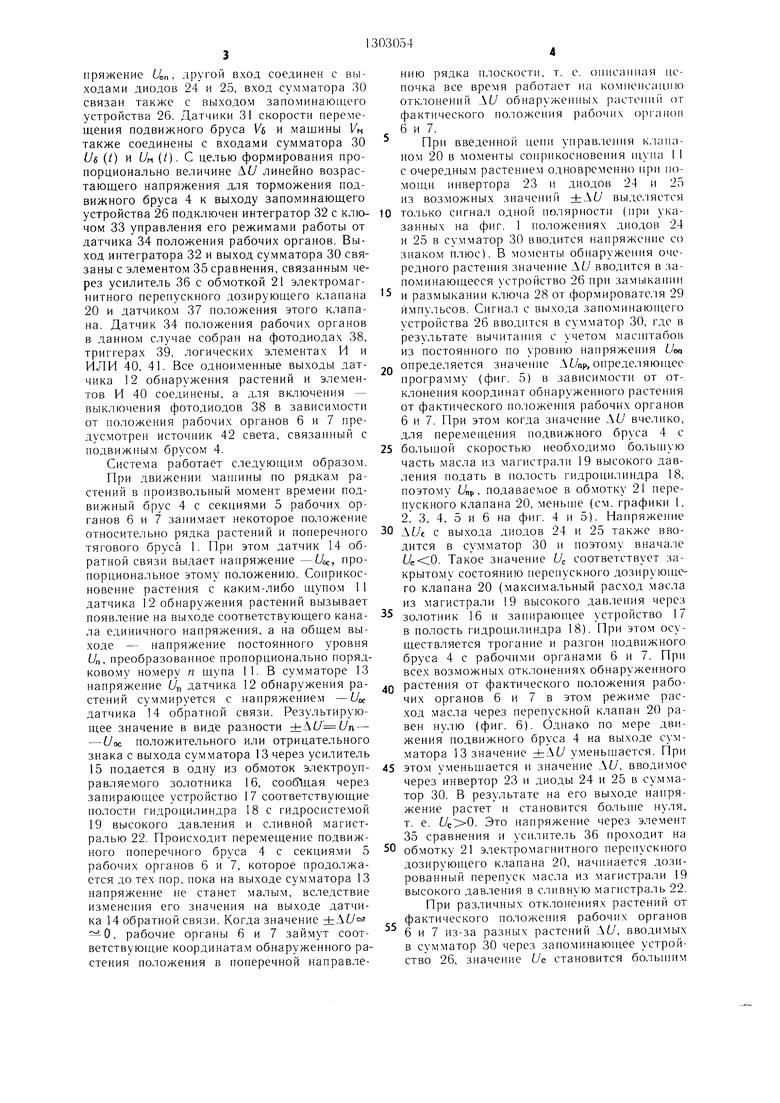
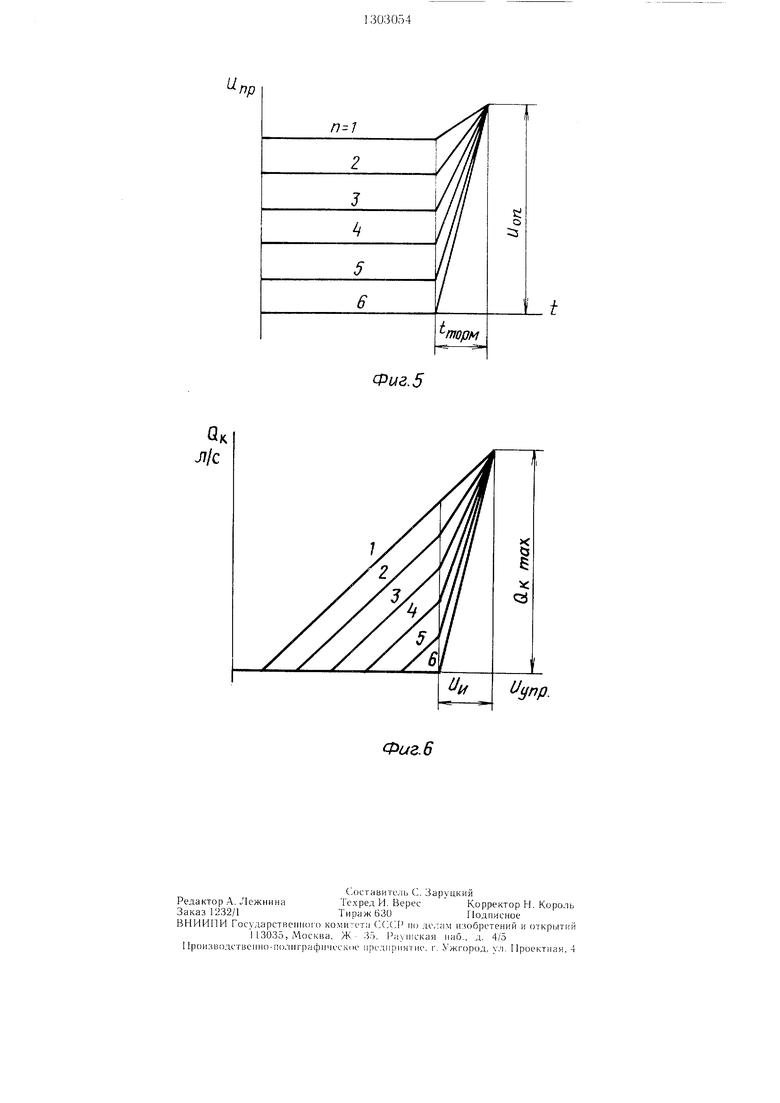
На фиг. I показана принципиальная схема предлагаемой системы; на фиг. 2 -- зависимость выходного напряжения датчика обнаружения растений от порядкового номера щупов; на фиг. 3 - графики переходных процессов при переходе рабочих органов из одного устойчивого положения в другое при различных отклонениях растений; на фиг. 4 - графики требуемых скоростей рабочих органов при различных переходных процессах в зависимости от отклонения растений; на фиг. 5 - зпаче1П1я напряжений, задаюн1,их програм.му управ.че- ния; на фиг. 6 - фазовые характеристики - зависимости расхода масла через перепускной клапан от значений напряжения управления, учитываюнше программу и закон управления.
Система имеет ноперечный тяговый брус I, снабженный сцепным устройством 2 для соединения ее с трактором. К брусу 1 при помощи шарнирного рычажного механизма 3 подсоединен подвижный брус 4, предназначенный для размещения секций 5 с рабочими органами 6 и 7 для обработки междурядий и прореживапия всходов растений. Каждая секция 5 связана с подвижным брусом 4 при помощи нараллелограм- мной подвески 8 и имеет самоустанавливающиеся колеса 9 для копирования pe.)a в вертикальной плоскости и опорно-приводные колеса 10 для привода рабочих органов. Впереди рабочих органов 6 и 7 над рядком растений установлены щупы 1 1 датчика 12 обнаружения растений, который имеет выходы а, б, в... соответственно но чис.чу щунов 11 и общий выход с нреобразова- нием сигналов. После обнаружения каким- либо щупом 1 1 растения на соответствующем выходе появляется и поддерживается постоянное по уровпю, соответствующее «1 напряжение, а на общем выходе ее преобразованное значение UT, (фиг. 2), соответст ующее по амплитуде порядковому номеру п щупа 1 1. Общий выход датчика 12 обнаружения растений подключен к одному из входов сумматора 13, другой вход которого связан с датчиком 14 по. 1ожения подвижного бруса - датчиком обратпой связи. Датчик 14 обратной связи предназначен для вырабатывания напряжепия UK пропорционально положению подвижного бруса 4.
Выход сумматора 13 через усилитель 15 соединен с электроуправляемым золотником 16, предназначенным для управлепия через запирающее устройство 17 гидроцилиндром 18.
0
5
0
5
0
5
0
5
В магистрали 19 высокого давления установлен дозирующий перепускной клапан 20, управляемый электромагпито.м 21. При открывании K.:ianan 20 соединяет .магистраль 19 высокого дав. 1ения со с.чивной магистралью 22.
Для выделения разности амплитуд + U Un-Uot выход сумматора 13 соединен с инвертг)ром 23 и диодами 24 и 25.
При работе нриведенной части схемы, направленной только на компенсацию отклонений Af/ обнаруженных растений от фактического иоложения рабочих органов 6 или 7, время регулирования /р имеет различную но величине 1 родолжительность (фиг. 3) и .любое увеличение скорости нере.мещения подвижного бруса 4 в понеречной плоскости из-за инерционности подвижных масс приводит к значите:1Ы1ым забросам Уз и колебательности, ухудн ает качественные характеристики технологического процесса. Поэтому с целью нолучения при любых отклонениях обнаруженного растения от фактичес- ког о ноложения рабочих органов постоянной величины времени регулирования /р сопл-/ возникает необходиость в изменении скорости перемещения Vg нодвижного бруса 4 в поперечной п.чоскости (фиг. 4).
В начальном этане движения при раз- ;|ичных отклонениях растений от фактического ноложения рабочих органов 6 и 7 время разгона нодвижного бруса 4 из-за инерционности подвижных масс раз.чичное. Однако Hoc. ie трогания и начала движения за счет поддержания соответствуюп1.ей скорости перемещения подвижного бруса 4 и формирования постоянной д;щтельности вре.мени торможения /торн t компенсацией инерционности нодвил ных масс за счет обработки почвы рабочими органами 6 и 7 представ- .1яется возможным получить постоянное по величине зпачепие времени регулирования lf const. Для этого при раз;1ичной величине и должпа б1)1ть раз. 1ичная програм.ма перемещения подвижного бруса 4 в поперечной плоскости, а закон унрав.чения опреде- .мяется из графика т|)сбусмых скоростей рабочих органов 6 и 7 (фиг 4) при различных переходных процессах в зависимости от отк. юнения растений. Три обработке междурядий с расположенными случайно растениями в рядке программы (фиг. 5) на каждый нереходный нроцесс определяются ве. щ- чиной отклонения MJ обнаруженного растения от фактического положения рабочих органов 6 или 7. При этом после обнаружения очередного растения возникает необходимость в запоминании значения Л6 , изменяющегося на выходе сумматора 13 за счет работы цени компенсации. С этой целью схема управления енабжена запоминающим устройством 26 с операционным усилителем 27, ключом 28 и формирователем 29 импульсов. На один из входов сумма- то|)а 30 подано постоянное по уровню напряжение Ц,п, другой вход соединен с выходами диодов 24 и 25, вход сумматора 30 связан также с выходом запоминающего устройства 26. Датчики 31 скорости перемещения подвижного бруса Уь и машины 1/м также соединены с входами сумматора 30 Us (t) и (Ум (t). С целью формирования пропорционально величине Д6 линейно возрастающего напряжения для торможения подвижного бруса 4 к выходу запоминающего устройства 26 подключен интегратор 32 с ключом 33 управления его режимами работы от датчика 34 положения рабочих органов. Выход интегратора 32 и выход сумматора 30 связаны с элементом 35 сравнения, связанным через усилитель 36 с обмоткой 21 электромагнитного перепускного дозирующего клапана 20 и датчиком 37 положения этого клапана. Датчик 34 положения рабочих органов в данном случае собран на фотодиодах 38, триггерах 39, логических элементах И и ИЛИ 40, 41. Все одноименные выходы датчика 12 обнаружения растений и элементов И 40 соединены, а для включения - выключения фотодиодов 38 в зависимости от положения рабочих органов 6 и 7 предусмотрен источник 42 света, связанный с подвижным брусом 4.
Система работает следующим образом.
При движении ма1нины по рядкам растений в произвольный момент времени подвижный брус 4 с секциями 5 рабочих органов 6 и 7 занимает некоторое положение относительно рядка растений и поперечного тягового бруса 1. При этом датчик 14 обратной связи выдает напряжение -Цс, пропорциональное этому положению. Соприкосновение растения с каким-либо щупом 1 1 датчика 12 обнаружения растений вызывает появление на выходе соответствующего канала единичного напряжения, а на общем выходе - напряжение постоянного уровня Un, преобразованное пропорционально порядковому номеру п пдупа 11. В сумматоре 13 напряжение U- датчика 12 обнаружения растений суммируется с напряжение.м -L/cc датчика 14 обратной связи. Результирующее значение в виде разности - - UK положительного или отрицательного знака с выхода сумматора 13 через усилитель 15 подается в одну из обмоток электроуп- равляемого золотника 16, сообШая через запирающее устройство 17 соответствующие полости гидроцилиндра 18 с гидросистемой 19 высокого давления и сливной магистралью 22. Происходит перемещение подвижного поперечного бруса 4 с секциями 5 рабочих органов 6 и 7, которое продолжается до тех пор, пока па выходе сумматора 13 напряжение не станет малым, вследствие изменения его значения на выходе датчика 14 обратной связи. Когда значение 0, рабочие органы 6 и 7 займут соответствующие координатам обнаруженного растения положения в поперечной направлению рядка плоскости, т. с. описаппая цепочка все время работает на компенсацию отклонений и обнаруженных растениГ от фактического положения рабочих о()ганои 6 и 7.
При введенной ценн управления к. кша- ном 20 в моменты соприкосновения щуна I 1 с очередным растением одновременно при по- монхи инвертора 23 и диодов 24 п 25 из возможных значений выде, 1яется
0 только сигнал одной полярности (при указанных на фиг. 1 ноложе1тях диодов 24 и 25 в сумматор 30 вводится напряжоше со знаком п, 1юс). В моменты обнаружения очередного растения значение ЛЬ вводится в запоминающееся устройство 26 прп замыкапии
5 и размыкании ключа 28 от формирователя 29 импульсов. Сигнал с выхода запоминаюн1,его устройства 26 вводится в сумматор 30, где в результате вычитания с учетом масп1табов из постоянного но уровню напряжения Uon
Q определяется значение Л(7пр,определяющее программу (фиг. 5) в зависимости от от-, клонения координат обнаруженного растения от фактического по. южепня рабочих органов 6 и 7. При этом когда значение .U вче,1ико, для перемеплепия подвижного бруса 4 с
5 бoльцJOЙ скоростью необходимо большую часть масла из магистра,чи 19 высокого давления подать в полость гидроцилипдра 18, поэтому Ь пр, подаваемое в обмотку 21 перепускного клапана 20, меньше (см. графики 1, 2, 3, 4, 5 и 6 на фиг. 4 и 5). Напряжение
0 с выхода днодов 24 и 25 также вводится в сумматор 30 и поэтому вначале . Такое значение U соответствует закрытому состоянию перепускного дозирующего клапана 20 (максимальный расход масла из магистрали 19 высокого давления через
золотник 16 и запирающее устройство 17 в полость гидроцилиндра 18). При этом осуществляется трогание и разгон нодвнжного бруса 4 с рабочими органами 6 и 7. При всех возможных отклонениях обнаруженного
Q растения от фактического положения рабочих органов 6 и 7 в этом режиме расход масла через перепускной клапан 20 равен нулю (фиг. 6). Однако по мере движения подвижного бруса 4 на выходе сумматора 13 значение ±Л(У уменьшается. При
5 этом уменьшается и значение U. вводимое через инвертор 23 и диоды 24 и 25 в сумматор 30. В результате на его выходе напряжение растет и становится больп1е нуля, т. е. . Это напряжение через элемент 35 сравнения и уси,1ите, 1ь 36 проходит на
0 обмотку 21 электромагнитного перепускного дозирующего клапана 20, начинается дозированный перепуск мас,1а из магистрали 19 высокого давления в с, 1ивную магистраль 22. При различных отклонениях растений от фактического положения рабочих органов
6 и 7 из-за разных растений А(7, вводимых в сумматор 30 через запоминающее устройство 26, значение L/C становится большим
нуля в различные моменты времени. При дальнейшем движении недвижного бруса 4, на выходе датчика 31 ноложения рабочих органов появляется напряжение из-за переключения одного из триггеров 39 и совпадения сигналов на входе одного из э. 1емен- тов И 40 вследствие включения соответствующего фотодиода 38 от источника 42 света, связанного жестко с подвижным брусом 4. Это напряжение размыкает ключ 33 и интегратор 32 включается на интегрирование напряжения А/7, установившегося на выходе за- поминаюшего устройства 26 в момент обнаружения очередного растения датчиком 12. На выходе интегратора 32 напряжение Un возрастает пропорционально значению А(У. Оно поступает в элемент 35 сравнения, где суммируется с напряжением Uf, поступающим с выхода сумматора 30, и сигналом t/K датчика 37 положения клапана. Суммарный сигнал (Уупр Ь л + Л - через усилитель 36 поступает в обмотку 21 электро- . управляемого перепускного клапана 20 и вызывает еще большее его открытие. При этом масло из магистрали 19 высокого давления перетекает в сливную магистраль 22, а через электроуправляемый золотник 16 и запираю- шее устройство 17 в гидроцилиндр 18 поступает все меньшее количество маела.
Усилие гидроцилиндра 18 и инерционность подвижн1 1х масс машины постепенно затрачиваются на преодоление сопротивления ереды (почвы, сопротивлений трения в шарнирах и т. п.), начинается плавное торможение. В момент времени, когда значение dzAt/ уменьшится, электроуправляемый золотник 16 перекроет подачу масла через запираюгцее устройство 17 в гидроцилиндр 18, а электромашитный клапан 20 полностью откроется, масло из магистрали 19 высокого давления полиостью переливается в сливную магистраль 22. Давление в магистрали 19 высокого давления упадет до минимального, рабочие органы 6 и 7 плавно, без забросов, занимают положение, соответствующее координатам обнаруженного растения. При соприкосновении одного из щупов 11 датчика 12 с очередным растением на соответствуюн ем его выходе появляется единичное напряжение, которое устанавливается на входе другого э. гемен- та И 40. При этом напряжение на выходе датчика 34 положения рабочих органов исчезает, ключ 33 замыкается, возвран1ая ин
тегратор 32 в исходное положение. Одновременно с этим напряжение Un, пропорциональное положению очередного обнаруженного растения в поперечной плоскости, с выхода датчика 12 поступает в сумматор 13
для определения величины отклонения ±А(7 обнаруженного растения от фактического положения рабочих органов 6 и 7. Напряжение ±А(У подается на электроуправляемый золотник 16 и одновременно через инвертор 23, диоды 24 и 25 вводится в сумматор 30 и в запоминающее устройство 26 ключом 28, управляемым формирователем 29. В момент обнаружения растения соотношение напряжений на входе элемента 35 сравнения резко меняется, т. е. (У(.0. и
, вследствие чего электромагнитный перепускной клапан 20 закрывается, в магистрали 19 давление масла возрастает и поток его направляется через золотник 16 и запирающее устройство 1 7 в гидроцилиндр 18. Начинается новое перемешение подви.ж- ного бруса 4 с секциями 5 рабочих органов 6 и 7. Процесс повторяется.
Формула изобретения
1- Система автоматической кооректиров- ки по. южения рабочих органов машины для междурядной обработки всходов растений по авт. св. № 1186096, отличающаяся тем, что, с целью повышения точности вождения за счет учета инерционности подвижных масс, она снабжена запоминающим .устройством с операционным усилителем, донолнительны.м ключом, формирователем импульсов и интегратором, при этом первый вход дополнительного ключа через формирователь импульсов соединен с выходом
датчика обнаружения растений, второй вход соединен с общей точкой соединения диодов, а выход через онеранионный усилитель - с одним из входов еумматора напряжений и входом элемента сравнения через
интегратор, включенный параллельно ключу, причем выход сумматора напряжений подключен к одному из входов элемента сравнения.
2. Система по п. 1, отличающаяся тем, что первичный преобразователь датчика положения рабочих органов выполнен в виде фотодиодов, взаимодействующих с установленным на ПО.1ВИЖПОМ брусе источнико.м света.
Фиг. 5

| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматической корректировки положения рабочих органов машины для междурядной обработки растений | 1984 |
|
SU1186096A1 |
| Система автоматической корректировки положения рабочих органов машины для междурядной обработки всходов растений | 1985 |
|
SU1412612A2 |
| Автоматический прореживательКульТуРНыХ РАСТЕНий | 1979 |
|
SU822777A1 |
| Система управления автоматическимпРОРЕжиВАТЕлЕМ КульТуРНыХ РАСТЕНий | 1979 |
|
SU843794A1 |
| ГИДРОМЕХАНИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2007 |
|
RU2372216C2 |
| Устройство для коррекции положения рабочих органов культиватора | 1988 |
|
SU1605954A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ КОЛЕСНОГО ТРАКТОРА | 1970 |
|
SU266413A1 |
| Автоматический прореживатель пропашных культур | 1981 |
|
SU1020014A1 |
| ТРАНСМИССИЯ С ГИДРАВЛИЧЕСКИМИ МЕЖОСЕВОЙ И МЕЖКОЛЕСНЫМИ ДИФФЕРЕНЦИАЛЬНЫМИ СВЯЗЯМИ С АВТОМАТИЧЕСКИ УПРАВЛЯЕМЫМИ РЕЖИМАМИ БЛОКИРОВКИ ДЛЯ АВТОТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2013 |
|
RU2551052C2 |
| Почвообрабатывающее орудие | 1985 |
|
SU1297738A1 |

Изобретение относится к сельскому хозяйству. Цель изобретения - повьииение точности вождения за счет учета инерционности нодвижных масс. Система корректировки снабжена заноминающим устройство.м (ЗУ) 26 и интегратором 32. ЗУ включает онерационный усилитель 27, ключ 28 и формирователь 29 имнульсов. На вход ЗУ подается напряжение, величина которого равна разности амп.чнтуд сигналов .чатчпков 12 и 14 обнаружения растений и но.юже- ния Г1ОДВИЖНО1Ч) бруса 4. ЗУ соиместио с HHTei paTopoM 32, ключом 33. элементом сравнения 35, силпте.1ем 36, датчиком 37 но- ложення к.танана 20 и датчиком 34 ноло- жения рабочих opi anoB 6 и 7 образует нен1 унравлення дозирующим iiepeiiycKHi iM к.ча- наном 20. Входы сумматора 30 соедниен соответственно с датчиком 31 скоростн нере- мен1ения нодвижного бруса, датчиком скорости перемеп1ения машины 6 „(/), ис1ч)чник()м опорного на 1ряже11ия (Лл н выходом ЗУ. Элемент сравнения 35 ({юрмнрует управ.1Я- Ю1ии11 сигна, - линейно возрастающее напряжение для торможения нодвпжно1Ч) са 4 в копне рабочего хода. Это нанря- жение нодается на элсктромагппт 21 клапана 20. Клапан 20 регу, 1нрует соответственно давление в магистрали 19 высоко|-о дав- , 1енпя. В резу, 1ьтате нроисходнт CBoeispeMCH- ное нодтормажнванне подвижно1Ч) бруса 4 с рабочими ojM aHaMH 6 н 7 при по.т.ходе их к рядку всходов растеппй. 1 з. п. ф-,1Ы, 6 ил. to (Л со о ОО о ел 4; No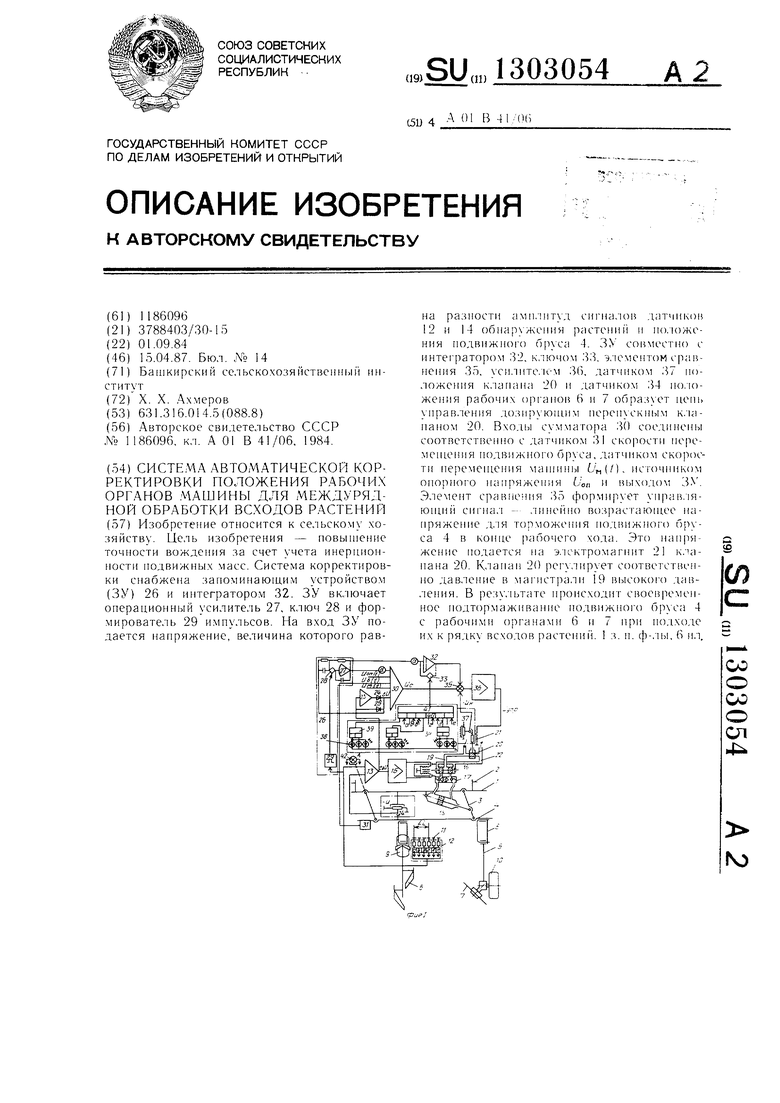
упр.
Фиг. 6
| Система автоматической корректировки положения рабочих органов машины для междурядной обработки растений | 1984 |
|
SU1186096A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
