1
Изобретение относится к трубопрокаткому производству и наиболее эффективно может быть использовано при конструировании подающе-поворотных механизмов пилигримовых станов.
Цель изобретения - снижение динамическ.их нагрузок.
На фиг. 1 приведена кинематическая схема механизма; на фиг. 2 вид А на фиг. 1; на фиг, 3 - схема зацепления зубчатых колес с указанием траекторий характерных точек.:
Преобразователь равномерного вращения в неравномерное содержит водило 1 первой ступени, несущее сателлит 2 и жестко соединенный с ним кривошип 3, водило второй ступени, вы- полненное в виде углового двуплечего рычага 4 несущего сателлит. 5 и жестко соединенный с ним кривошип 6, тягу 7, связывающую рычаг с кривошипом первой ступени, ведомое звено 8 второй ступени, тягу 9, связывающую его с кривошипом второй ступени, и неподвижное колесо 10 с внутренними зубьями, а также зубчатые шестерню 11 и колесо 12, передающие вращение водилу первой ступени.
Водило 1 приводится в равномерное вращение с помощью жестко установленного на нем зубчатого колеса 12 и ведущей шестерни 11, вращающейся с частотой движения клети. В теле зубчатого колеса 12 выполнен круговой паз, позволяющий покачивание относительно него оси сателлита 5.
Преобразователь работает следующим образом.
Вращение водила 1 относительно неподвижного колеса 10 осуществляется от главного привода стана (не показан) через ведущую шестерню 11 и жестко связанное с водилом 1 зубчатое колесо 12. За один оборот ше.стернй 11 водило 1 делает четверть оборота, сателлит 2 и жестко связанный с ним кривошип 3, обкатываясь внутри неподвижного колеса 10, делает вокруг своей оси полный оборот а центр f пальца кривошипа 3 описывает участок БД В, В 2 В четырехвершинной гипоциклоиды 13 (астроиды). Движение центра В пальца кривошипа 3 посредством тяги 7 преобразуется в поворот рычага 4 на угол - СдОС 90°, которому в свою очередь соот862972
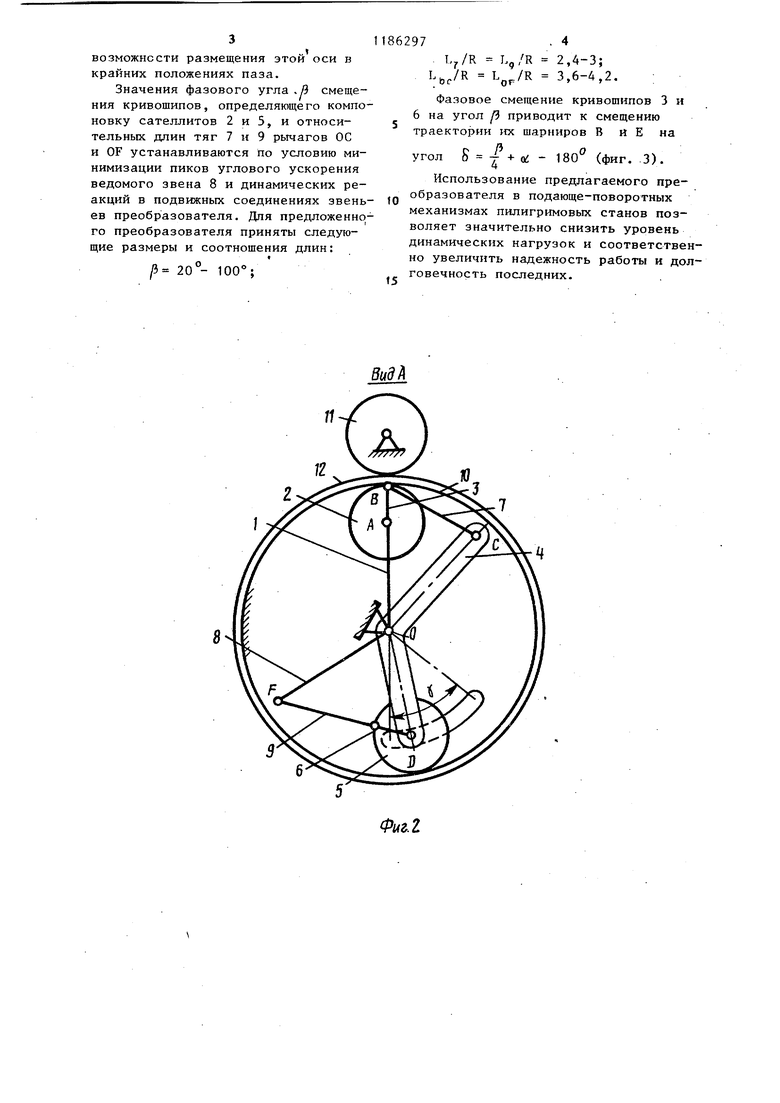
ветствует полный оборот сателлита 5 и жестко связанного с ним кривошипа 6 вокруг их оси. При этом центр Е пальца кривошипа 6 перемещается по участку ЕдЕ, четырехвершинной гипоциклоиды 14, идентичной гипоциклоиде 13 и смещенной относительно нее на угол 8 . Движение центра Е пальца кривошипа 6 посредством тяги 9 пре0 образуется в поворот на 90° ведомого звена 8. В период прохождения точками В и Е участков и гипоциклоид, что составляет 67,5° поворота водила 1 из 90° (или 3/4
5 цикла), ведомое звено 8 имеет приближенный выстой с углом поворота, не превышающим +1.
Параметры преобразователя устанавливают по следующим соображениям.
0 Числа зубьев колес должны быть связаны соотношениями
Z,, 4Z,, ; Z,D Zg 4Zg ,
5 гарантирующими четверть оборота водила 1, углового двуплечего рычага 4 и ведомого звена 8 за один оборот ведущей шестерни 11. Радиусы кривошипов .3 и 6 равны между собой и равны радиусам R начальных окружностей сателлитов 2 и 5.
При работе преобразователя все время меняется взаимное расположение сателлитов 2 и 5, причем сателлит 5 то опережает, то отстает от сателлита 2. Чтобы центробежные силы инерции сателлитов 2 и 5 уравновесили одна другую, значение угла COD между плечами рычага 4 выбираются так, что при движении сателлитов по возможности обеспечивается их диаметральная противоположность, т.е. сателлит 5 в середине своего углового размаха Cf .° относительно равномерно вращающегося водила 1 несущего сателлит. 2, диаметрально противоположен последнему. Это достигается путем выбора значения угла pi в области 125-135, обеспечивающей равное и минимальное угловое отклонение сателлита 5 относительно сателлита 2 в обе стороны и наибольший эффект уравновешивания.
л
5 Центральный угол V« паза в колесе 12 определяется по углу размаха 81 30-50 оси сателлита 5 относительно зубчатого колеса с учетом возможности размещения этой оси в крайних положениях паза. Значения фазового угла ./3 смещения кривошипов, определяющего компо новку сателлитов 2 и 5, и относительных длин тяг 7 и 9 рычагов ОС и OF устанавливаются по условию минимизации пиков углового ускорения ведомого звена 8 и динамических реакций в подвижных соединениях звень ев преобразователя. Для предложение го преобразователя приняты следующие размеры и соотношения длин: 20°- 100°; 97 Lj,/R L,/R 2,4-3; ./R 3,6-4,2. Фазовое смещение кривошипов 3 и 6 на угол р приводит к смещению и Е на траектории ifx шарниров В с Р . , .„„О 180 (фиг. 3). о - т + «; Использование предлагаемого преобразователя в подающе-поворотных механизмах пилигримовых станов позволяет значительно снизить уровень динамических нагрузок и соответственно увеличить надежность работы и долговечность последних.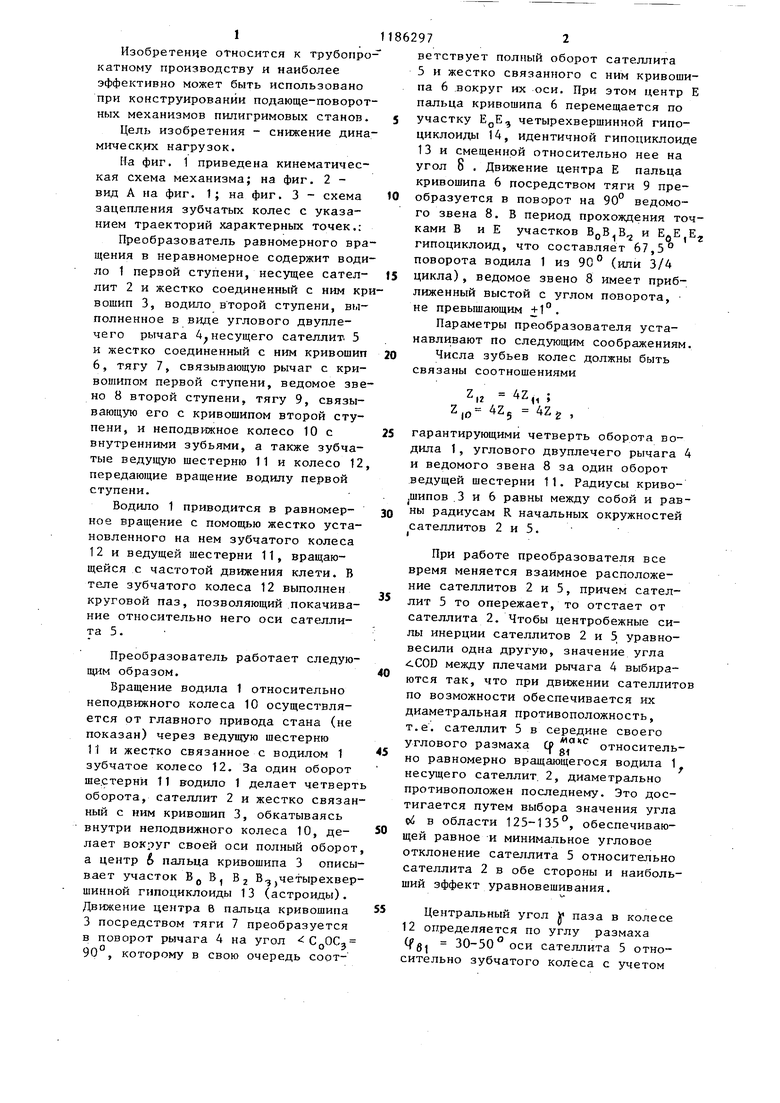
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073804C1 |
| БЕЗИНЕРЦИОННЫЙ ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073805C1 |
| Привод перемещения рабочей клети стана холодной прокатки труб | 1979 |
|
SU863034A1 |
| Рычажно-зубчатый механизм с остановками | 1987 |
|
SU1493838A1 |
| МЕХАНИЗМ (ВАРИАНТЫ) | 1996 |
|
RU2121093C1 |
| Преобразователь непрерывного вращения в одностороннее прерывистое | 1990 |
|
SU1763768A1 |
| Привод возвратно-поступательного перемещения частей стана холодной прокатки труб | 1981 |
|
SU1062946A1 |
| ПЕДАЛЬНЫЙ ПРИВОД | 1992 |
|
RU2068364C1 |
| Педальный привод (варианты) | 2016 |
|
RU2651314C1 |
| ЗУБЧАТЫЙ ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ВРАЩАТЕЛЬНОЕ | 2012 |
|
RU2528493C2 |
ПРЕОБРАЗОВАТЕЛЬ РАВНОМЕРНОГО ВРАЩЕНИЯ В НЕРАВНОМЕРНОЕ преимущественно в подающе-поворотном механизме пилигримового стана, содержащий две последовательно соединенные ступени планетарно-пиклоидных механизмов, состоящие каждая из водила, несущего жестко связанные сателлит и кривошип, ведомое звено второй ступени, кинематически связанное с кривошипом, и неподвижное колесо с внутренними зубьями, о тлич ающийся тем, что, с целью снижения динамических нагрузок, водило второй ступени выполнено в виде углового двуплечего рычага, смонтированного концентрично с водилом и кинематически связанного с кривошипом первой ступени, сателлиты обеих ступеней размещены внутри неподвижного коле(Л са в одной плоскости, а кривошипы первой и второй ступеней смещены по . фазе.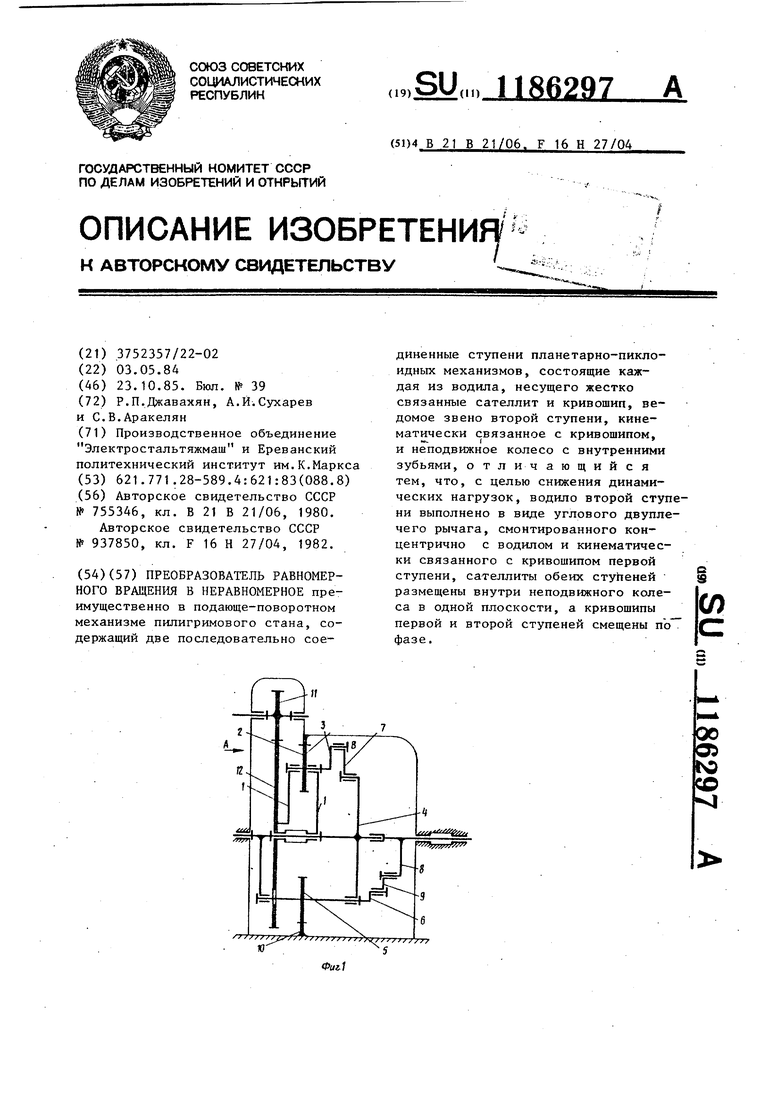
11
| Авторское свидетельство СССР № 755346, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для преобразования равномерного вращения в прерывистое | 1979 |
|
SU937850A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
