Изобретение относится к машиностроению, в частности к механизмам для осуществления прямолинейного движения, и может быть использовано в движителях /в шагающих колесах с возможностью трансформации в колесо качения, в качестве гребных колес, в приводах вращения гидроагрегатов/, в приборостроении, возможно, в станкостроении и вполне пригодно в устройстве аттракционов, например, карусель со сложным движением сидения.
Известен механизм из книги И.И.Артоболевского. Механизмы в современной технике, М. Наука, 1973, сх. 235, стр. 206, содержащий стойку, колесо, водило, сателлит и шарнирно связанное с ним звено, при этом передаточное отношение между водилом и сателлитом выбрано равным - 1.
Недостатком указанного механизма является возможность получения прямолинейного участка только в одном виде траектории, что ограничивает область его применения.
Целью изобретения является расширение области применения путем получения прямолинейных участков в разного вида траекториях движения выходного звена, а также расширение арсенала технических средств механизмов, осуществляющих прямолинейное движение.
Указанная цель достигается тем, что механизм, осуществляющий прямолинейное движение, содержащий стойку, колесо, водило, сателлит, связанный со звеном, кинематически связан с водилом определенным передаточным отношением, где кинематическая связь водила с сателлитом осуществлена с передаточным отношением Uнq, равным числу, взятому из числового промежутка - 1 ≤ Uнq < 0, которая осуществлена либо посредством симметричной установки на водиле двух пар /в случае необходимости повышения жесткости в вариантах может быть использовано и более двух пар сателлитов, которые могут быть установлены и несимметрично/ двух последовательно соединенных сателлитов, из которых один соединен внешним зубчатым зацеплением с неподвижным колесом /однако колесо может быть установлено и с возможностью поворота, например упруго, - объяснено ниже/, а второй через неподвижно /упруго/ закрепленный на нем кривошип со звеном механизма шарнирно,
либо посредством установки на водиле двух последовательно соединенных сателлитов, из которых первый соединен внешним зацеплением с неподвижным колесом, а второй - с установленным на нем кривошипом, шарнирно связанным со звеном, который связан шарнирно как минимум со вторым кривошипом, поворотно установленным в стойке,
либо посредством установки на водиле не менее двух сателлитов, входящих во внутреннее зацепление с неподвижным колесом и входящих в шарнирную связь со звеном,
либо посредством установки на водиле сателлита, входящего во внутреннее зацепление с колесом и несущего на себе кривошип /кривошип на сателлите при необходимости может быть установлен неподвижно или через упругую связь, например, при использовании механизма в качестве шагающего колеса, в целях обеспечения равномерного движения или амортизации башмака колеса в зоне контакта его с опорной поверхностью грунта/, связанный шарнирно со звеном, находящимся в шарнирном соединении с кривошипом, поворотно установленным соосно оси неподвижного колеса.
либо посредством установки на водиле сателлита, входящего во внутреннее зацепление с неподвижным колесом и в шарнирную связь со звеном, который связан с шарниром, подвижно установленным в замкнутую направляющую стойки,
либо посредством двух пар, симметрично расположенных на водиле, скрепленных между собой сателлитов, из которых первый входит во внешнее зацепление с неподвижным колесом, а второй с поворотно установленной на водиле шестерней, входящей в шарнирную связь со звеном /часть фигуры этого варианта использована из литературы, см. И.И.Артоболевский. Механизмы в современной технике, М. Наука, 1973, с. 208, сх. 239, поэтому фигура этого варианта не приведена в материалах заявки,
либо посредством шарнирного соединения звена не менее чем с двумя кривошипами, один из которых образован осью вращения сателлита и шарниром, связывающим звено, при этом на свободном конце звена поворотно установлено выходное звено, которое снабжено дополнительно шарниром, установленным со смещением от оси вращения первого шарнира, связанным с тягой, которая свободным концом шарнирно связана с "блоком тяг", ось вращения которого установлена с возможностью движения путем подвижной установки его оси в прямолинейную направляющую, а также механизм снабжен устройством для фиксации колеса относительно стойки или относительно оси водила и устройством для фиксации оси "блока тяг" соосно оси вращения водила или эксцентрично ее.
Поскольку в вариантах звено фактически установлено на двух кривошипах, то у двухкривошипного механизма противоположные звенья могут быть и неравными, то есть второй кривошип может быть параллельным или непараллельным, а также при необходимости может быть установлено и на трех кривошипах, причем не всегда на симметрично расположенных.
Здесь приведена малая часть разных возможных вариантов реализации технического решения.
Указанный технический результат в решении первого варианта достигается в совокупности следующих существенных признаков:
1. Стойка - общий с прототипом признак;
2. Колесо - общий;
3. Водило - общий;
4. Сателлит - общий;
5. Сателлит связан внешним зацеплением с колесом через паразитную шестерню - отличительный от прототипа признак;
6. Сателлит связан с кривошипом - признак можно отнести к общему признаку;
7. Сателлит связан со звеном шарнирно - общий;
8. На водиле установлены две пары сателлитов - отличительный;
9. Звено установлено шарнирно на двух кривошипах - отличительный признак;
10. Водило с сателлитом кинематически связано с передаточным отношением Uнq равным числу, взятому из числового промежутка -1 ≤ Uнq < 0.
В совокупности признаков данного варианта присутствуют существенные отличительные от прототипа признаки 5, 8, 9, 10, которые позволяют получить указанный технический результат.
В решении второго варианта кроме признаков 1 - 7, 9, 10 имеются еще нижеперечисленные существенные признаки 11, 12, которые в совокупности с несущественными признаками позволяют получать указанный в цели технический результат:
11. Механизм снабжен вторым кривошипом - отличительный;
12. Ось вращения второго кривошипа установлена соосно оси колеса - отличительный.
В решении третьего варианта кроме признаков 1 4, 7, 9, 10 варианта 1 присутствуют признаки:
13. Cателлит связан с колесом внутренним зацеплением - общий;
14. Hа водиле симметрично установлены два сателлита - отличительный.
Совокупность перечисленных признаков, из которых признаки 9, 10 и 14 отличительные, позволяют достичь указанный технический результат.
В решении четвертого варианта присутствуют признаки 1 - 4, 6, 7, 9, 10, 12, 13, из которых признаки 9, 10, 12 существенные отличительные.
В решении пятого варианта присутствуют признаки:
15. Mеханизм снабжен пазом, выполненным в виде окружности - отличительный признак;
16. Звено связано с шарниром, перемещающимся в пазу стойки - отличительный признак.
Перечисленные признаки также позволяют получить указанный технический результат.
Для седьмого варианта прототипом выбрали тот же механизм, что и для вариантов 1 - 5. Этот вариант показывает устройство, использующее механизмы, приведенные в вариантах 1 - 5, поэтому в этом варианте возможно присутствие вышеприведенных отличительных существенных признаков 5, 8 - 12, 14 в разном их сочетании, а также признаки:
17. Выходное звено снабжено вторым шарниром - отличительный;
18. Второй шарнир установлен на звене со смещением от первого - отличительный;
19. Выходное звено связано с тягой посредством второго шарнира - отличительный;
20. Тяга связана поворотно с "блоком тяг" - отличительный;
21. Ось поворота "блока тяг" установлена подвижно в прямолинейную направляющую - отличительный;
22. Механизм снабжен устройством для фиксации колеса относительно стойки или относительно оси водила и устройством для фиксации оси "блока тяг" соосно оси вращения водила или эксцентрично ее - отличительный.
В решении седьмого варианта присутствие указанных отличительных существенных признаков позволяет использовать механизм в качестве движителя.
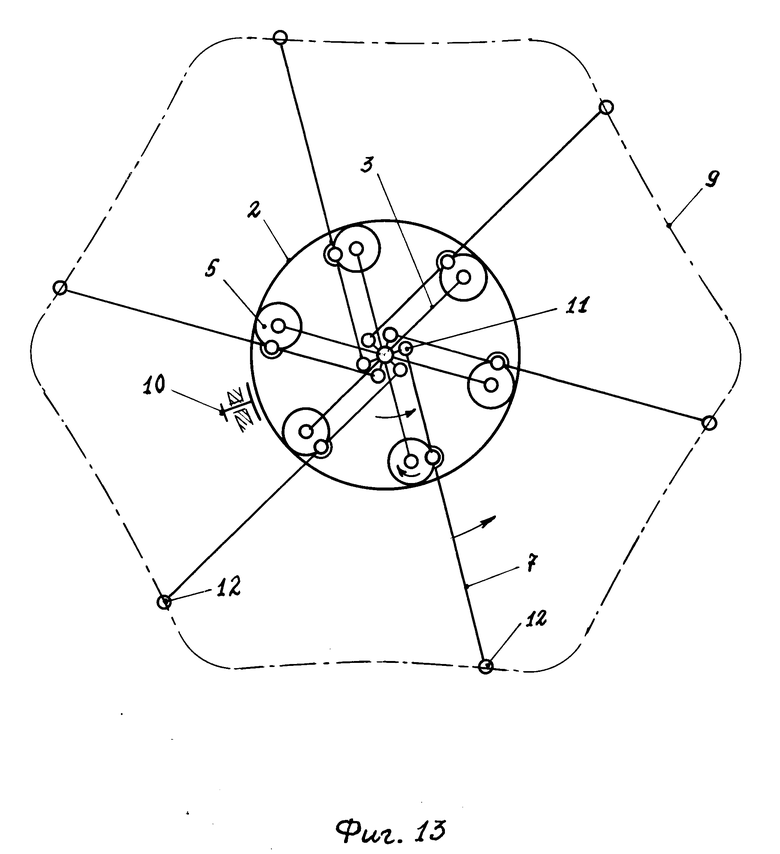
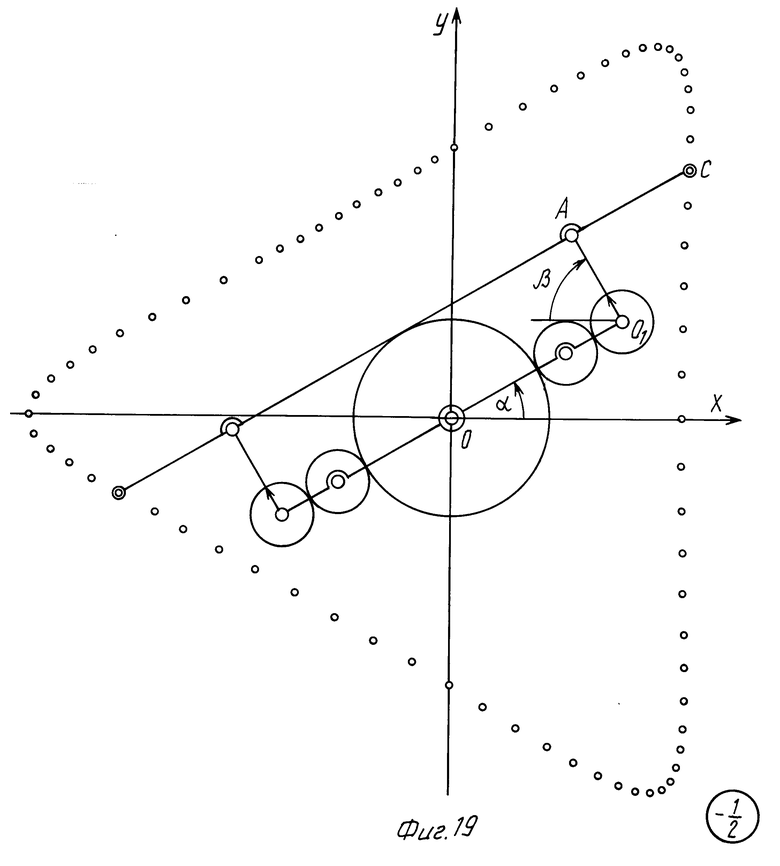
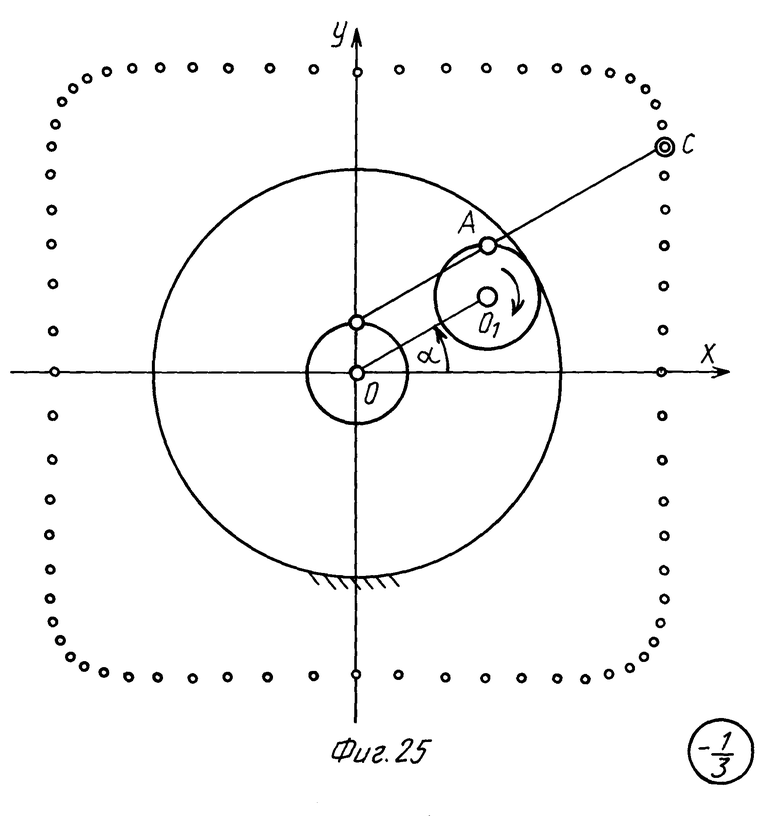
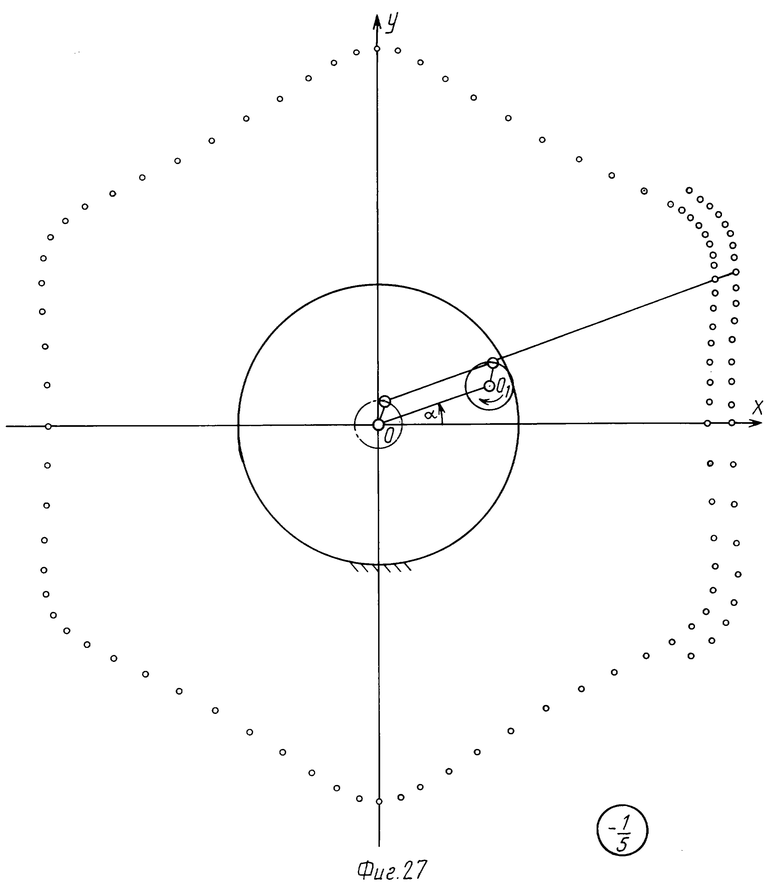
На фиг. 1 и 2 изображены варианты кинематических схем механизма для аналитического определения траектории движения точки звена; на фиг. 3 - 12 приведены варианты кинематических схем с траекториями движения точек звена; на фиг. 13 изображена кинематическая схема механизма с Uнq = -1/5 с шестью выходными звеньями; на фиг. 14 изображен механизм с Uнq = - 1/4 с шестью выходными звеньями, пригодный для выполнения шагающего колеса с минимальными вертикальными колебаниями; на фиг. 15 изображена кинематическая схема механизма шагающего колеса с возможностью трансформации в колесо качения; на фиг. 16 и 17 изображен механизм трансформации шагающего колеса в колесо качения; на фиг. 18 - 27 приведены кинематические схемы фиг. 3 - 12 с траекториями движения выходных элементов, полученными аналитическим путем.
Механизм варианта I содержит стойку 1, к которой закреплено колесо 2, водило 3. На водиле 3 установлена пара последовательно сцепленных сателлитов 4 и 5, один из которых входит во внешнее зацепление с колесом 2. С сателлитом 5 неподвижно /упруго/ связан кривошип 6, который входит в шарнирную связь со звеном 7, установленным шарнирно на кривошипе 8, ось вращения которого установлена соосно оси колеса 2.
Работа механизма варианта I объясняется следующим образом.
При повороте водила 3/H/ на некоторый угол α с угловой скоростью ωн, сателлит 5(q), перекатываясь внутри колеса 2, поворачивается с обратной угловой скоростью -ωq на угол β, величина которого определяется выражением
а передаточное отношение между водилом и сателлитом определяется выражением
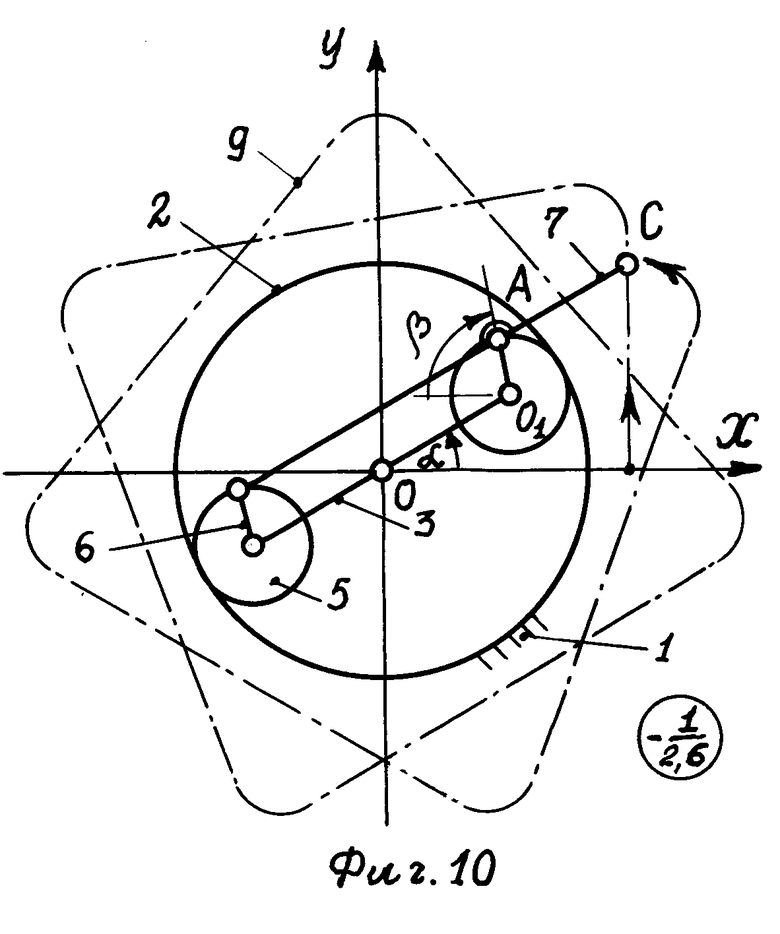
В результате вращения сателлита 5 приводится во вращение кривошип 6, шарнир которого, связанный со звеном 7, совершит в пространстве траекторию, схожую гипоциклоиде или укороченной гипотрохоиде, а шарнир кривошипа 8, связанный со звеном 7, совершит круговое движение. Шарниры кривошипов 6 и 8, несущие звено 7, двигаясь каждый по своей траектории, перемещают звено 7 в пространстве. При этом некоторые точки звена 7 за полный оборот водила 3 описывают траекторию движения, имеющую форму многоугольника с закругленными углами, стороны которых имеют участки, мало отличающиеся от прямой линии, а количество сторон многоугольников равно величине соотношения радиусов rb/rq делительных окружностей колеса и сателлита. Например, при величине соотношения радиусов rb/rq=4, при котором Uнq=-1/3, точки звена 7 описывают квадрат с закругленными углами.
Кинематическая схема варианта II отличается от первого варианта присутствием вместо кривошипа 8 второй пары сцепляющихся между собой сателлитов 4 и 5 /фиг. 3 - 7/.
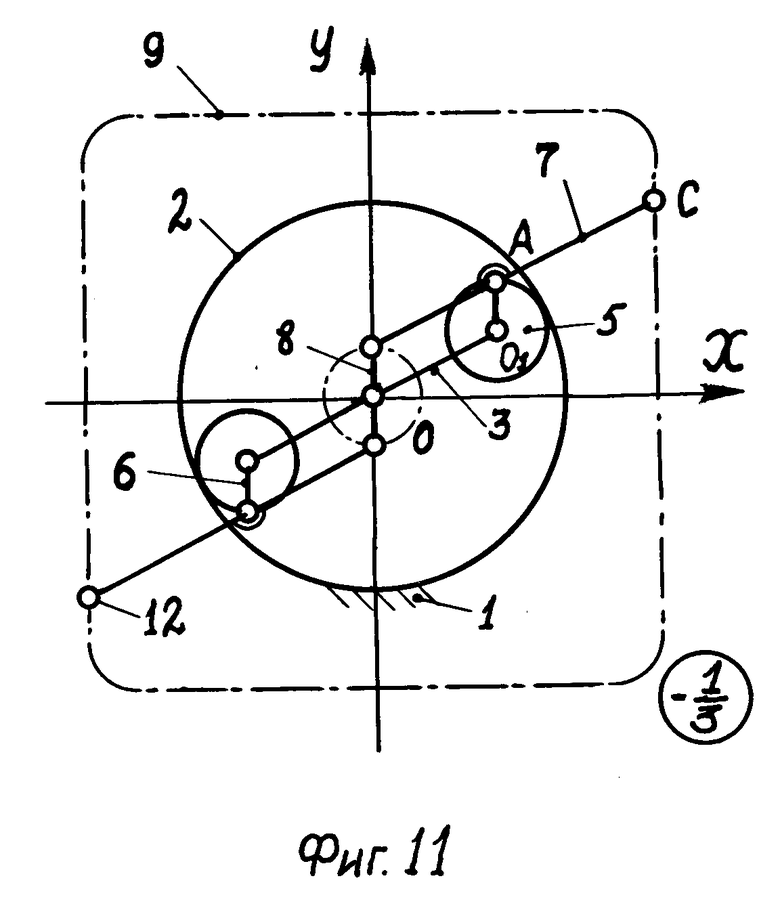
Механизм варианта III содержит стойку 1, колесо 2, водило 3, на котором установлены сателлиты 5, входящие во внутреннее зацепление с колесом 2. С сателлитами 5 входит в шарнирную связь звено 7.
При вращении водила 3 на полный оборот приводятся во вращение с обратной угловой скоростью сателлиты 5, шарниры которых, связанные со звеном 7, описывают замкнутую в пространстве траекторию - гипоциклоиду или укороченную гипотрохоиду, приводя звено 7 в пространстве в сложное движение. В результате некоторые точки звена 7 описывают траекторию движения 9, имеющие форму многоугольников с закругленными углами, стороны которых имеют участки, мало отличающиеся от прямой линии.
Кинематическая схема варианта IV отличается от варианта III использованием вместо второго сателлита 5 кривошипа 8, ось вращения которого установлена соосно оси колеса 2.
Кинематическая схема варианта V отличается от четвертого варианта использованием вместо кривошипа 8 шарнира, перемещающегося в замкнутой круговой направляющей /на фиг. 2 изображена штриховой линией, где использован шарнир, перемещающийся в круговом пазу, выполненном в стойке/.
Во всех вариантах механизма координаты точек движения звена 7 определяются выражениями
xi= OO1•cosα+AC•cosα-AO1•cosβ;
yi= OO1•sinα+AC•sinα+AO1•sinβ.
Вариант VII /фиг. 15/ содержит стойку 1, на которой с возможностью останова относительно стойки 1 посредством тормозного приспособления 10 /устройство фиксации колеса/ установлено колесо 2 и водило 3 с установленными на нем сателлитами 5, входящими во внутреннее зацепление /зубчатое, цевочное/ с колесом 2. Каждый сателлит 5 шарнирно связан со своим звеном 7, один конец которого шарнирно соединен с блоком кривошипов 11. Ось вращения блока кривошипов установлена соосно оси колеса 2. На свободном конце звена 7 поворотно установлено выходное звено /опорный башмак/ 12, выполненное в виде дуги /дуг/ окружности колеса качения и снабженное дополнительным, смещенным от первого шарнира на расстояние ε, шарниром 13, выполненным в виде ролика /фиг. 16, 17/. Ролик 13 выходного звена 12 размещен в кулисе 14, размещенной на одном конце тяги 15. Второй конец тяги 15 поворотно посажен на свою цапфу 16, геометрическая ось которой установлена эксцентрично оси 17 блока тяги с эксцентриситетом, равным 
Ось 17 блока тяг поворотно установлена в ползуне 18, размещенном в направляющей стойки 19. На оси 17 установлена шестерня 20. Ползун 18 соединен со штоком силового элемента 21 /устройством фиксации оси блока тяг/. Параллельно направляющей стойки 19 на стойке 1 установлена зубчатая рейка 22.
Работа механизма варианта VII объясняется следующим образом.
Посредством тормозного приспособления 10 в исходном положении колесо 2 застопорено относительно стойки 1 и освобождено от вала водила 3. От поворота водила 3 перекатываются сателлиты 5 и от суммарного движения их опоры 12 двигаются по траектории криволинейного многоугольника.
Поскольку опора 12, находящаяся в контакте с поверхностью грунта, расположена горизонтально, то она своим роликом 13, двигаясь в кулисе 14, поворачивает свою тягу 15 и "блок тяг". От воздействия каждой тяги 15 на свой ролик 13 все опоры 12 колеса в цикле удерживаются в горизонтальном положении, в том числе и в момент выхода рабочей опоры 12 с контакта с поверхностью грунта. Поэтому и последующая опора 12 входит в контакт с грунтом, находясь в горизонтальном положении. В этом варианте поворот "блока тяг" осуществляется от воздействия на него рабочей опоры.
Однако работа шагающего колеса будет более надежной, если поворот водила 3 и оси 17 "блока тяг" согласовать посредством связи их системой шестерен /не указ./.
Работа механизма трансформации шагающего колеса в колесо качения объясняется следующим образом.
При работе колеса в шагающем режиме "блок тяг" находится в верхнем положении /фиг. 16/, как на фиг. 15. При этом тяги 15 "блока тяг" застопорены между собой.
Для приведения шагающего колеса в колесо качения на фиг. 15 шарниры 23 сегментов опор 12 устанавливают и фиксируют соосно оси ролика 13. Затем освобождают тяги и посредством силового элемента 21 ось 17 "блока тяг" перемещают в нижнее положение /фиг. 17/ до совпадения ее в положение соосности с осью колеса 2 и фиксируют ось 17 в этом положении. При движении оси 17 вниз шестерня 20 входит в зацепление с неподвижной рейкой 22. При этом ось 17 поворачивается по часовой стрелке на 180o, укорачивая тягу 15 на величину ε. Тяга 15, укорачиваясь, поворачивает дугообразные опоры до сопряжения их в контуре окружности колеса качения. В этом положении /фиг. 17/ тяги 15 "блока тяг" застопоривают между собой /механизм стопорения тяг 15 между собой на фигурах не приведен/, а посредством тормозного приспособления 10 колесо 2 освобождается от стойки 1 и фиксируется к валу водила 3 /не указ./. Таким образом шагающее колесо преобразуется в колесо качения.
Приведенные в материалах заявки варианты механизмов не исчерпывают и другие возможные варианты выполнения механизма. Например, при необходимости использования механизма в качестве ведущего шагающего колеса колесо 2 может быть установлено с упругой возможностью поворота относительно стойки 1, поскольку выходное звено 12 по траектории движения 9 перемещается неравномерно, так как на путь перемещения выходного звена 12 влияют величины углов поворота водила 3 и сателлита 5, причем направление перемещения выходного звена 12 от воздействия сателлита 5 в овальной части многоугольника направлено в одну сторону, а от воздействия водила 3 - в другую сторону. Для определения характера движения опоры рассмотрим механизм с Uнq=-1/4 /фиг. 14/. Выходное звено 12 находится в левой овальной части многоугольника. Повернем водило 3 против часовой стрелки на угол α = 5°, от которого выходное звено 12 переместится вправо, а кривошип 6 с сателлитом 5 повернется по часовой стрелке на β = 20°, от поворота которого выходное звено 12 переместится влево.
Если в этом случае колесо 2 чуть повернуть в направлении вращения водила 3, то сателлит 5 от поворота колеса 2 повернется на угол -Δβ против часовой стрелки, перемещая выходное звено 12 вправо.
В результате от поворота водила 3 сателлит 5 повернется на меньший угол β, чем при жестко закрепленном колесе 2, а выходное звено 12 в овальной части многоугольника переместится на больший отрезок. Таким образом, в механизме имеется возможность управления ускорением перемещения выходного звена 12.
Применение изобретения позволит расширить арсенал технических средств при конструктивном решении узлов машин и устройств в разных областях машиностроения.
Для подтверждения предложенного технического решения аналитически определим траектории движения выходного звена механизма.
Пользуясь литературой И.И.Артоболевский. Теория механизмов и машин. М. Наука, 1988, с. 154 - 157, рис. 7.22 для определения передаточного отношения между водилом (H) и колесом (b), выведем формулу, то есть
Согласно формуле /7.40/ стр. 155
1) U
для фиг. 1 определим
Полученное выражение подставим в выражение 1), получим ,
,
отсюда .
.
Для определения координат точек движения выходной точки механизма выведем формулы /фиг. 1 и 2/
3) xi = OM = OF + FM;
4) OF = OO1•cosα;
5) FM = BK - BO1;
6) BO1= AO1•cosβ;
7) BK = AC•cosα.
На фиг. 1 и 2 ωн= α, а ωq= β, тогда, используя формулу 2), выведем
получим
Полученные выражения подставим в уравнение 3) и получим
9) xi= OO1•cosα+AC•cosα-AO1•cosβ;
10) yi = CM = KM + DK + CD;
11) CD = AC•sinα;
12) DK = AB = AO1•sinβ;
13) KM = O1F•OO1•sinα.
Подставим выражения 11) - 13) в выражение 10) и получим
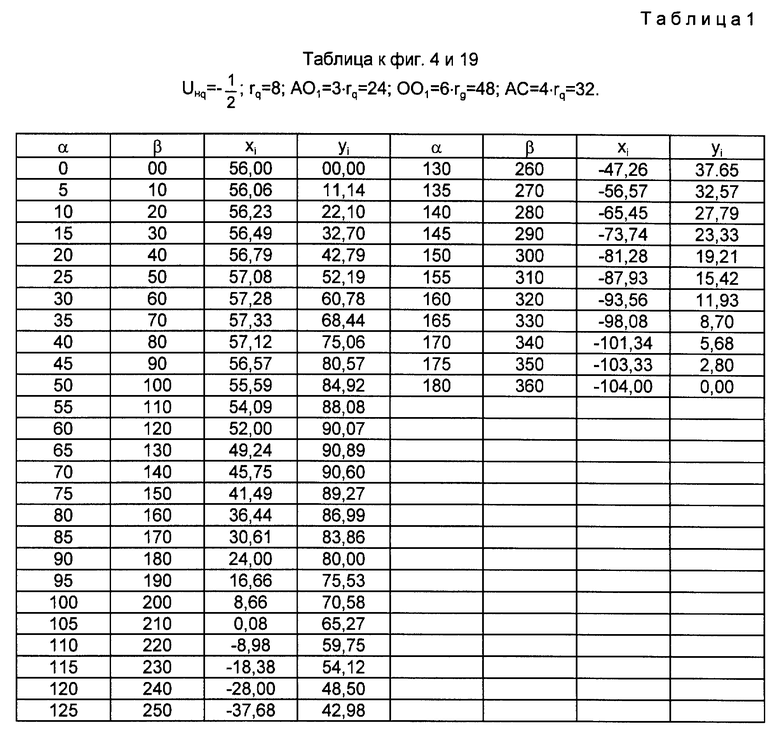
14) 
Далее: а) пользуясь полученными уравнениями 9) и 14), определим координаты x и y траектории движения выходных звеньев механизмов /фиг. 3 - 12/. Полученные данные занесем в таблицы; б) пользуясь данными таблиц, построим фиг. 18 - 27.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ (ВАРИАНТЫ) | 1995 |
|
RU2115849C1 |
| МЕХАНИЗМ | 1992 |
|
RU2054593C1 |
| Привод транспортного средства | 1988 |
|
SU1768436A1 |
| Движитель, шагающий колесными опорами | 2020 |
|
RU2763058C1 |
| Механизм шагающего движителя | 2019 |
|
RU2723923C1 |
| Шагающее колесо | 2020 |
|
RU2747337C1 |
| ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 1991 |
|
RU2006725C1 |
| Манипулятор для передачи изделий | 2023 |
|
RU2822908C1 |
| Шагающее колесо транспортного средства | 1989 |
|
SU1660997A1 |
| Шагающее колесо | 2021 |
|
RU2763325C1 |


























Механизм предназначен для использования в машинах и устройствах, применяющих в узлах прямолинейное движение. Механизм содержит стойку, колесо, звено, водило, сателлит. Сателлит кинематически связан с водилом передаточным отношением Uнд, равным числу, взятому из промежутка - 1 ≤ Uнд < 0. Звено связано не менее чем с двумя шарнирами, одним из которых является шарнир, связанный с сателлитом. При вращении водила точки звена описывают траектории движения в виде многоугольника с закругленными углами. Механизм позволяет получать прямолинейные участки в разного вида траекториях выходного звена, тем самым расширяя арсенал технических средств механизмов, осуществляющих прямолинейное движение. 2 с. и 6 з.п.ф-лы, 27 ил., 7 табл.
| Артоболевский И.И | |||
| Механизм в современной технике, т | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| - М.: Наука, 1973, с | |||
| Гидравлический способ добычи торфа | 1916 |
|
SU206A1 |
| RU, 2056002, 10.03.96, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |

