2, Установка no п„ 1 g о т л и ч а впни,м с приводами конвейера и ю щ а ; с я тем что она снабжена заслонки и снабженным контактом расг оложе и1ым в зоне разгрузки узлом пер-ключения на автоматический реавтономного птравления, сблокиро- жим.
П86755
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для удаления мусора из зданий | 1985 |
|
SU1330044A1 |
| Устройство для разгрузки смерзшихся пищевых отходов из контейнеров | 1983 |
|
SU1165618A1 |
| Установка для сбора и удаления бытовых отходов из зданий | 1977 |
|
SU763205A1 |
| Мусоровоз | 1984 |
|
SU1206203A1 |
| Система сбора и удаления бытовыхОТХОдОВ из пОМЕщЕНий | 1979 |
|
SU818967A1 |
| Устройство для перегрузки бытовых отходов из мусоропровода в транспортное средство | 1989 |
|
SU1752692A1 |
| МУСОРОНАКОПИТЕЛЬ ДОМА (ВАРИАНТЫ) | 2010 |
|
RU2431726C1 |
| Устройство для сбора и удаления мусора | 1985 |
|
SU1270059A1 |
| Устройство для удаления мусора из зданий | 1985 |
|
SU1270058A1 |
| Мусоровоз | 1981 |
|
SU982987A1 |
1. УСТАНОВКА ДЛЯ УДАЛЕНИЯ МУСОРА ИЗ ПОМЕЩЕНИЙ, содержащая вертикальный мусоропровод, нижний торец которого перекрыт заслонкой с приводом, и размещенные под мусоропроводом конвейер с контейнерами, проходящий через зону разгрузки, и подпружиненную платформу для взвешивания контейнера с закрепленным под ней датчиком управления приводом конвейера, отличающаяся тем, что, с целью упрощения зксштуатации установки и повышения ее производительности путем автоматизации процрсса удаления мусора, контейнеры снабжены закрепленными на конвейере ложементами с упорами, а платформа для взвешивания контейнеров - контактом выключения привода конвейера, взаимодействующим с упорами и сблокирован-ным с приводом заслонки, при этом i привод конвейера выполнен с реле управления, подключенным черег назван(Л ный датчик к приводу заслонки. V iLfc . iWi/ тт / г Т-Т/||| |.... - .I .t/ if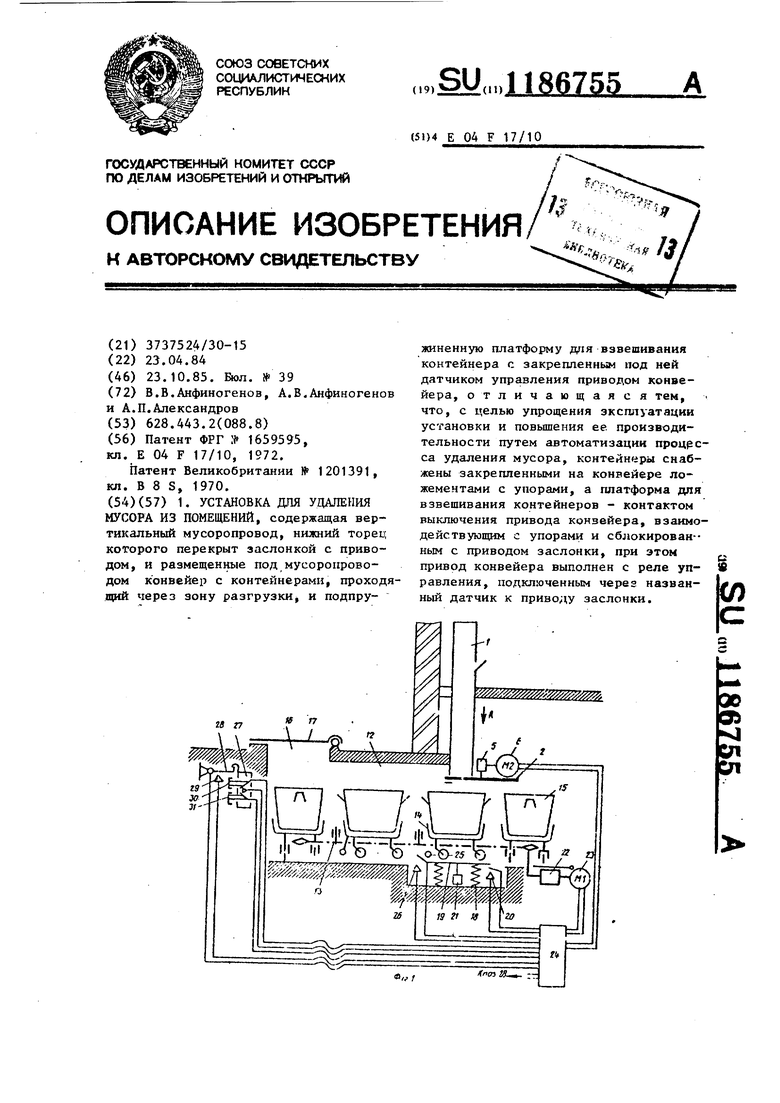
Изобретение относится к об гастн коммунального хозяйства, в частности к установкам для удаления мусора из помещений,
Цель изобретения - упрощение эксплуатации установки и повышение ее производительности путем автоматизации процесса удаления мусора.
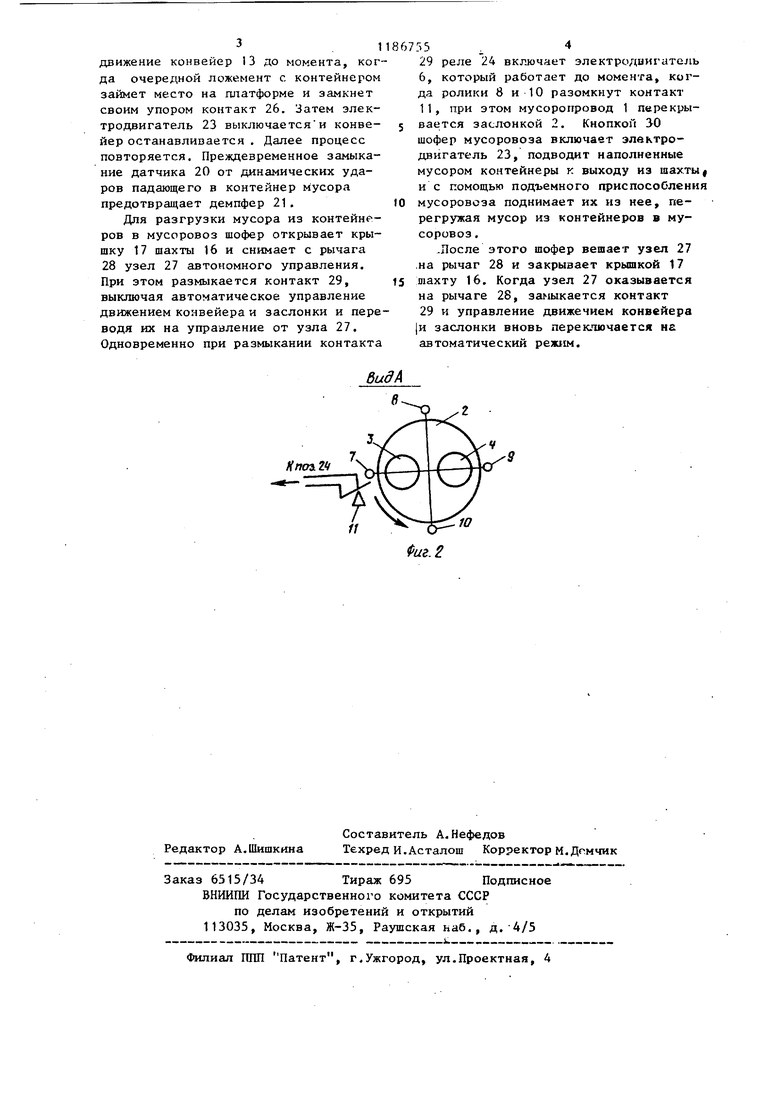
На фиг,1 схематически изображена ycTaHOB-i a для удаления мусора из помещений, общий вид; на. фиг,2 вид А на фиг,1.
Установка содержит вертикальный мусоропро.вод 1 J нижний торец которого перекрыт заслонкой 2 с ств€рстиям 3 и 4 и приводом5 состоящим из редуктора 5 и электродвигателя 6„ Заслонк снабжена роликами 7 - 10 размыкающими контакт 11, Под мусоропроводом в тоннеле 12 размещен конвейер (3 с ложементами t4 для контейнеров 15„ проходящий через зону разгрузки с
шахтой 165, 11ерекрытой крышкой 17 j к которой подъезй ают транспортные мусоровозы. Под мусоропроводом установ лена также при помощи регулируемых пружин 18 платформа 19 для взвешивания загружаемого мусором контейнера под которой закреплены датчик 20 управления приводом конвейера и демпфер 21, Привод конвейера состоит из редуктора 22 и электродви1ателя 23 и снабжен реле 24 управления, подключенным через датчик 20 к приводу заслонки и связанным с контактом 11, На ложементах 14 закреплены роликовые упоры 25; взаимодействующие с контактом 26 выключения привода конвейера, смонтированным под ппа.тформо 19 и сблокированньм с приводом заслонкИо В шахте 16 под крышкой 17 предусмотрен узел 27 автогомного управления для оператора мусоровоза. сблокированный через реле 24 с np iводами конвейера и заслонки. Узел 27 смонтирован на шарнирном ры:чаге
28, взаимодействующем с контактом 29 переключения на автоматический режимJ и снабжен кнопкой 30 прямого хода конвейера и кнопкой 31 его обратного хода о
Установка работает следующим образом
В исходном положении мусоропровод 1 закрыт заслонкой 2, при этом контакт 11 замкнут, а ролик 10 находитс непосредственно за ним. При подаче электропитания на реле 24 включается электродвигатель 23, который через редуктор 22 приводит в движение конвейер 13. Когда ложемент 14 с контейнером 15 займет место на платформ 19 и упором 25 замкнет контакт 26, реле выключает электродвигатель 23 и одновременно включает электродвигатель 6, При выключении электродвигателя 23 ложемент с контейнером останавливается на платформе 19 под мусоропроводом При включении электродвигателя 6 заслонка 2 поворачивается до момента, когда ролик 7 разомкнет контакт 11, после чего реле выключает электродвигатель 6, при этом отверстие 3 располагается против мусоропровода и последний будет открыт„ .
Падающий по мусоропроводу мусор попадает в контейнер и уплотняется в нем за счет кинетической энергии падения. При наполнении мусором контейнера его вес постепенно увеличивается, и при достижении расчетного веса платформа проседает на пружинах 18 и замыкает датчик 20, после чего реле включает электродвигатель 6, который поворачивает заслонку 2 до момента, когда ролик 8 разомкнет контакт 11, В результате мусоропрово перекрывается заслонкой. После размыкания контакта 11 реле выключает электродвигатель 6 и включает электродвигатель 23, который приводит в
1
движение конвейер 13 до момента, когда очередной ложемент с. контейнером займет место на платформе и замкнет своим упором контакт 26. Затем электродвигатель 23 выключаетсяи конвейер останавливается . Далее процесс повторяется. Преждевременное замыкание датчика 20 от динамических ударов падающего в контейнер мусора предотвращает демпфер 21.
Для разгрузки мусора из контейнрров в мусоровоз шофер открывает крышку 17 шахты 16 и снимает с рычага 28 узел 27 автономного управления. При этом размыкается контакт 29, выключая автоматическое управление движением конвейера и заслонки и пере водя их на управление от узла 27. Одновременно при размыкании контакта
Tb
29 реле 24 включает электроднигатель 6, который работает до момента, когда ролики 8 и 10 разомкнут контакт 11, при этом мусоропровод 1 перекрывается заслонкой 2. Кнопкой SO шофер мусоровоза включает электродвигатель 23, подводит наполненные мусором контейнеры к выходу из шахты| и с помощью подъемного приспособления 10 мусоровоза поднимает их из нее, перегружая мусор из контейнеров в мусоровоз .
-Лосле этого шофер вешает узел 27 .на рычаг 28 и закрывает крышкой 17 5 шахту 16. Когда узел 27 оказывается на рычаге 28, зг1мыкается контакт 29 и управление движением конвейера |и заслонки вновь переключается на автоматический режим.
видА
2
о Фиг. 2
| Рабочий орган землеройной машины | 1988 |
|
SU1659595A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Машина для укладки сборно-разборных дорожных покрытий | 1984 |
|
SU1201391A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
