(54) МУСОРОВОЗ

| название | год | авторы | номер документа |
|---|---|---|---|
| Мусоровоз | 1985 |
|
SU1247316A1 |
| Устройство для разгрузки контейнеров в кузов мусоровоза | 1988 |
|
SU1565783A2 |
| Мусоровоз | 1981 |
|
SU1020315A1 |
| Устройство для уплотнения и выгрузки мусора | 1981 |
|
SU973438A1 |
| Мусоровоз | 1986 |
|
SU1395565A1 |
| Устройство для разгрузки контейнеров в кузов мусоровоза | 1983 |
|
SU1126512A1 |
| Мусоровоз | 1983 |
|
SU1101386A1 |
| Мусоровоз | 1985 |
|
SU1331744A1 |
| Мусоровоз | 1983 |
|
SU1100204A1 |
| Мусоровоз | 1984 |
|
SU1206203A1 |
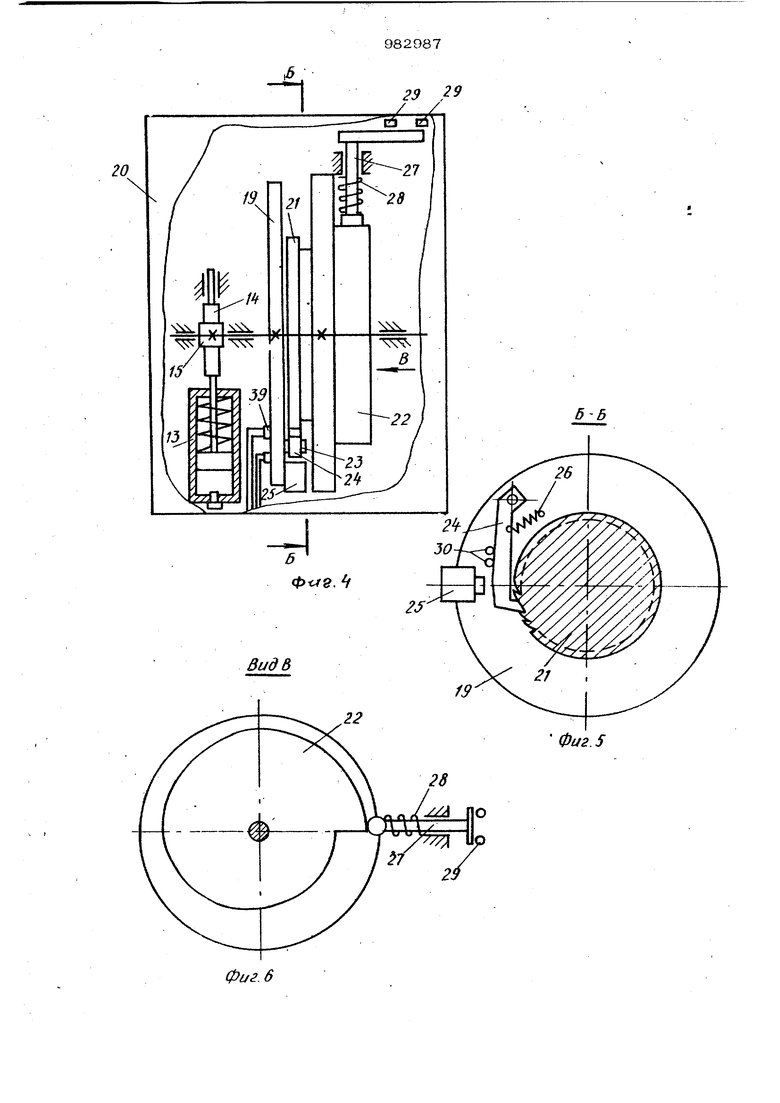
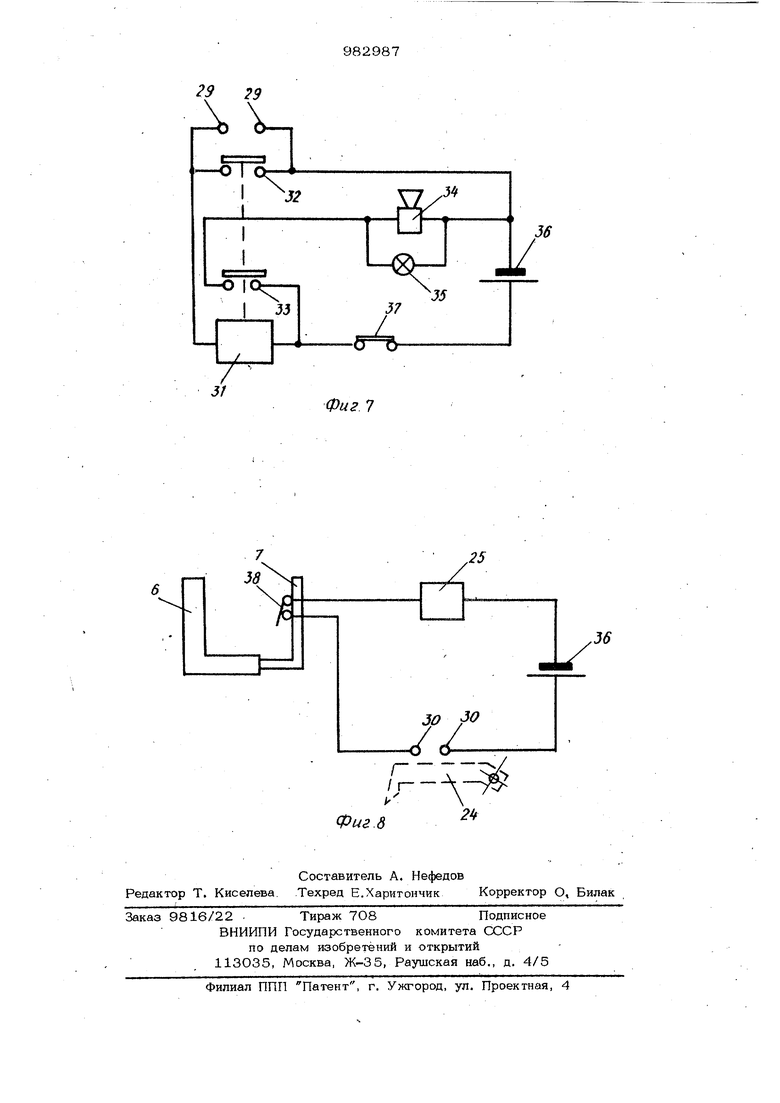
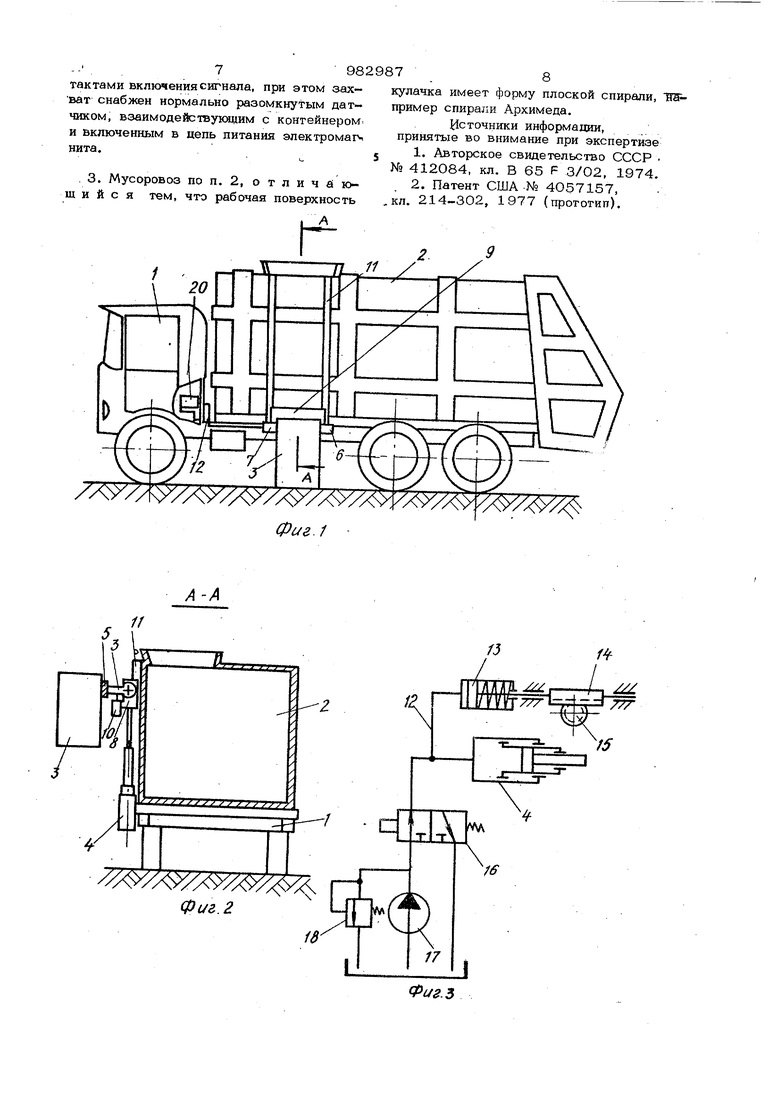
Изобретение относится к коммунальному машиностроению, конкретно к ма шинам для сбора и вьтоза мусора, и может найти применение в машинах для перевозки отходов деревообрабатьюакицей и лесной промышленности, а также в сельском хозяйстве. Известен мусоровоз, содержащий кузов и кран для подъема и разгрузки контейнеров, установленный на крьпие кузова fl . Недостатком этого мусоровоза оголяется значительная материалоемкость рабочего оборудования, приводящая к снижению его полезной грузоподъемности и про изводител ьнос ти. Наиболее -близким по технической сущ ности к изобретению является мусоровоз, включающий смонтированный на транспорт ном средстве кузов с механизмом для разгрузки контейнеров, состоящим из захвата и гидроцилиндра для его перемещения в вертикальной плоскости 23 . Недостатком указанного мусоровоза является то, что в нем не обеспечивается контроль за его загрузкой. В резуль- тате этого мусоровоз оказывается либо недогруженным, либо перегруженным и эффективность его работы существенно снижается. Цель изобретения - повышение эффективности работы мусоровоза путем обеспечения контроля за его загрузкой. Поставленная цель д остигается тем, что мусоровоз снабжен устройством для регистрации массы загруженного в кузов мусора, состоящим из датчика массы контейнеров, выполненного в виде сблокированного с гидроыилиндром для перемещения захвата пружинного гидроцилиндра, на штоке которого закреплена рейка, зацепленная с шестерней, и сигнализатора оптимальной загрузки, кузова мусором, управняемого от упомянутой шестерни. Сигнализатор оптимальной загрузки к;зова мусором вьшолнен в виде диска, жестКО закрепленного на одном вaлv г ИГР ТРП398ней и снабженного подпружиненной собачкой с электромагнитом и нормально разомкнутыми контактами, включенными в цепь питания электромагнита, и со.осно устанозленного относительно диска и контактирующего с его собачкой храпового ко леса, к которому присоединен кулачок с подпружиненным толкателем, взаимодействующим с контактами включения сигнала, при этом захват снабжен нормально разомкнутым датчиком, взаимодействующи с контейнером и включенным в цепь питания электромагнита. Кроме того, рабочая поверхность кулачка имеет форму плоской спирали, например спирали Архимеда. На фиг. 1 схематично изображен мусоч ровоз, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - гидравлическая схема привода гидроцилиндра для перемещения захвата в вертикальной плоскостщ на фиг. 4 - устройство для регистра- шш массы загруженного в кузов мусора общий вид; на фиг. 5 - разрез Б-Б на фиг. 4; на фиг. 6 - вид В на фиг. 4; на фиг. 7 - электрическая схема сигнализатора оптимальной загрузки кузова мусором ; на фиг. 8 - то же, включения храпового механизма. Мусоровоз содержит транспортное сред ство 1, на котором смонтирован кузов 2, с загрузочным отверстием, например, в верхней передней части кузова. Сбоку на кузове установлен механизм для разгрузки контейнеров 3, состоящий из гидроцилиндра 4, перемещающего в вертикальной плоскости захват 5 с неподвижной губкой 6 и подвижной губкой 7. Захват смонтирован посредством щарнира 8 на каретке 9 и снабжен гидродилиндром-опрокидывателем 10. .Каретка установлена с возможностью перемещения в вертикальных направляющих 11 кузова 2 под действием гидроцилиндра 4, нагнетательная полость которого соединена трубопроводом 12 с .пружинным гидроцилиндром 13, представляющим собой датчик массы контейнеров, на штокекоторого закреплена зубчатая рейка 14, находящаяся в зацеплении с шестерней 15. Привод гидроцилиндра 4 осуществляется обычным образом через гидрораспределитель 16 при помощи насоса 17, снабженного перепускным клапаном 18. Мусоровоз снабжен сигнализатором оп ТИМ альной загрузки кузова мусором, управляемым от шестерни 15, который выполнен в виде диска 19, жестао закреп7ленного на одном валу с шестерней в корусе 20 (фиг. 4), Соосно диску 19 смонтировано также с возможностью вращения храповое колесо 21, жестко соединеннное кулачком 22 рабочей поверхностью, вьшолненной в виде плоской спирали, например спирали Архимеда. На торцовой поверхности диска 19, обращенной к храповому колесу, установлена на оси 23 собачка 24, снабженная электромагнитом 25 и возвратной пружиной 26. Кулачок 22 связан через толкатель 27, снабженный пружиной 28, с контактами 29, а собачка 24 оборудована нормально, разомкнутыми контактами 30. Контакты 29 толкателя 27 включены последовательно с обмоткой реле 31, контакты 32 которого включены параллельно контактам 29 для установки реле на самоподвес, а контакты 33 включены последовательно со звуковым сигнальным устройством 34 vi световым сигнальным устройством 35. Питание электрических депей осуществляется от. источника 36 постоянного тока, последовательно которому включен размыкатель 37 (фиг. 7). На подвилшой губке 7 захвата 5 смонтирован нормально разомкнутый контакт- ный датчик 38 (фиг. 8), подключенный . последовательно через нормально разомкну- чые контакты 30. собачки 24 и электромагнит 25 к источнику 36 постоянного тока. Для подачи электрического тока к эле.ктромагниту 25 и контактам 30 на тыльной стороне диска 19 смонтированы токосъемники 39 (фиг. 4). Мусоровоз работает следующим образом. Контейнер 3 с мусором фиксируется захватом 5 при сближении его неподвиж-гной губки 6 и подвижной губки 7. Одно- ; временно замыкается контактный датчик 38. Затем при включении гидрораспределителя 16 гидроцилиндр 4 обеспечивает перемещение вверх в направляющих 11 каретки 9 вместе с зафиксированным контейнером 3. В крайней верхней точке гид:роцилиндр-опрокидыватель Ю поворачивает захват 5 с контейнером вокруг шарнира 8, опорожняя его через загрузочное отверстие внутрь кузова 2, где обычным образом с помощью уплотняющей плиты осуществляется перемещение и уплотне- ние мусора. Разгрузка мусора из кузова 2 после транспортировки обеспечивается перемещением уплотняющей плиты при поднятом заднем борте. При подъеме контейнера давление в нагнетательной полости гидроцилиндра 4, пропорциональное массе мусора и контейнера, передается через рабочую жидкость трубопровода 12 к пружинному гидроцилиндру 13 (фиг. 3), сжимая его пружину и перемещая зубчатую рейку 14, что обе печивает поворот шестерни 15. При повороте шестерни 15 на соответствуняциЙ угол поворачиваются диск 19, а также жестко соединенное с последним при помощи собачки 24 храповое колесо 21 и кулачок 22. При опускании порожнего контейнера собачка 24 обеспечивает сво. бодный обратный поворот диска 19- ,при неподвижных храповом колесе 21 и ку лачке 22. Пля исключения повторного срабатьюанйя этого устройства, например после падения давления .в гидроцилиндре 4 в момент вынужденной остановки контейнера, при отходе в холостое положение собЬчка 24 замыкает нормально замкнутые контакты ЗО. Поскольку при зафиксированном посредством захвата 5 контеййере контактный датчик 38 замкнут, то это обеспечивает включение электромаг нита 25 (фиг, 8), причем последний удерживает собачку 24 в холостом положении вплоть до опускания контейнера на землю и освобождения захвата 5. При подъеме следующего контейнера цикл работы датчика и сигнализатора оптимальной загрузки кузова мусором повто ряется, причем храповое колесо 21 к кулачок 22 поворачиваются на соответствую щий угол, суммируя массу мусора к .масс загруженной в кувов 2 ранее. Масса стандартного порожнего контейнера исклю чается при настройке, например, путем предварительного сжатия пружины в пружинном гидроцилиндре 13. Величина хода зубчатой рейки 14 и профиль кулачка 22 выбираются таким образом,Чтобы .обеспечить один полный оборот кулачка 22лри полностью загруженном мусором кузове 2 по грузоподъем ности мусоровоза. После достижения оптимальной величины загрузки кузова мусором кулачок 22, повернувшись вокруг своей оси на один полный оборот в сумме отдельных угловых перемещений, перемещает толкатель 27, сжимая пружину 28, и замыкает контакты 29. При замыкании толкателем 27 контактов 29 включается реле 31 (фиг. 7), которое замыкает контакты 32, устанавливаясь на самоподвес, и замыкает контакты 33, включая звуковое 34 и световое 35 сигнальные устройства, которые пре9876 дупреждают оператора мусоровоза об оптимальной загрузке кузова 2. Последовательным включением и выключением размыкателя 37 оператор отключает сигналь- ное устройство, после чего производится транспортировка г усора к месту обезвреживания или утилизации, а устройство для регистрации массы загружаемого мусора автоматически приводится в исходное положение. Профиль рабочей поверхйости кулачка 22, выполненной в виде спирали Архимеда, обеспечивает плавную регулировку пары: кулачок 22 -.толкатель 27 лри на-. стройке устройства для регистрации массы загружаемого мусора. Преимущество изобретения..заключается в автоматическом измерении массы загружаемого в кузов мусора, что пбзволяет избежать перегрузок базовых автомобил ньЕс щасси и, тем самым, обеспечить повышение надежности и долговечности работы мусоровоза и его шин. Формула изобретения 1.Мусоровоз, включающий смонтированный на транспортном средстве кузов с механизмом для разгрузки контейнеров, состоящим из захвата и гидроцилнндра для его перемещения в вертикальной плоскости, отличающийся тем, что, с целью повышения эффективности работы мусоровоза путем обеспечения контроля за его загрузкой, он снабл ен устройством для регистрации массы загруженного в кузов мусора, состоящим из датчика массы контейнеров, выполненного в виде сблокированного с гидроцилиндром для перемещения захвата пружинного гид- роштиндра, на штоке которого закреплена рейка, .зацепленная с шестерней, и сигнализатора оптимальной загрузки кузова мусором, управляемого от упомянутой шестерни. 2,Мусоровоз по п. 1, о т л и ч а ющ и и с я тем, что сигнализатор оптимальной загрузки кузова мусором выполнен в виде диска, жест1Ш закрепленнбго на одном валу с шестерней и снабженного подпрулсиненной собачкой с электромагнитом и нормально разомкнутыми контактами, включенными в цепь питания электромагнита, и соосно установле1того относительно диска и контактир щего с его собачкой храпового колеса, к которому присоединен кулачок с подпружиненным 1Г)лкателем, взаимодействующим с кон7982тактами включения сигнала, при этом захват снабжен нормально разомкнутым датчиком, взаимодействукщим с контейнером. и включенным в цепь питания электромат нита. 3. Мусоровоз по п. 2, о т л и ч и юш и и с я тем. что рабочая поверхность 878 кулачка имеет форму плоской спирали, ТШ пример спирали Архимеда, Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 412084, кл. В 65 F 3/02, 1974. . 2. Патент США № 4О57157, , кл. 214..302, 1977 (прототип).
фиг. 1
1
. 777 У
V
///.//У//$//
фиг. 2
18
Лл
/7
Фиг.
9 29
gj
32
L-O 10::- I J3
7
j/
« 7
ftf.
к. I
-Л-
