В примеггяемых устаноцках для электрообработкн металлов подача электрода- шструмента к изделию осуществляется с помощью автоматических регуляторов различного рода.
Однако известные регуляторы подобного рода не обеспечивают требуемой стабильности обработки .вследствие возникновения значнтелып:,1Х вибрацин регулируемого органа установки (электрода-инструмента).
С целью устранения указанного Еюдостатка, иредлагается ввести между рс1улируемым органом установки (электродом-инструмемтом) и исполнительным органом регулятора жесткую связь с промежуточным звеном в вгтде самотормозящсй передачи.
Регулятор может быть в)нолнен в нескольких вариантах.
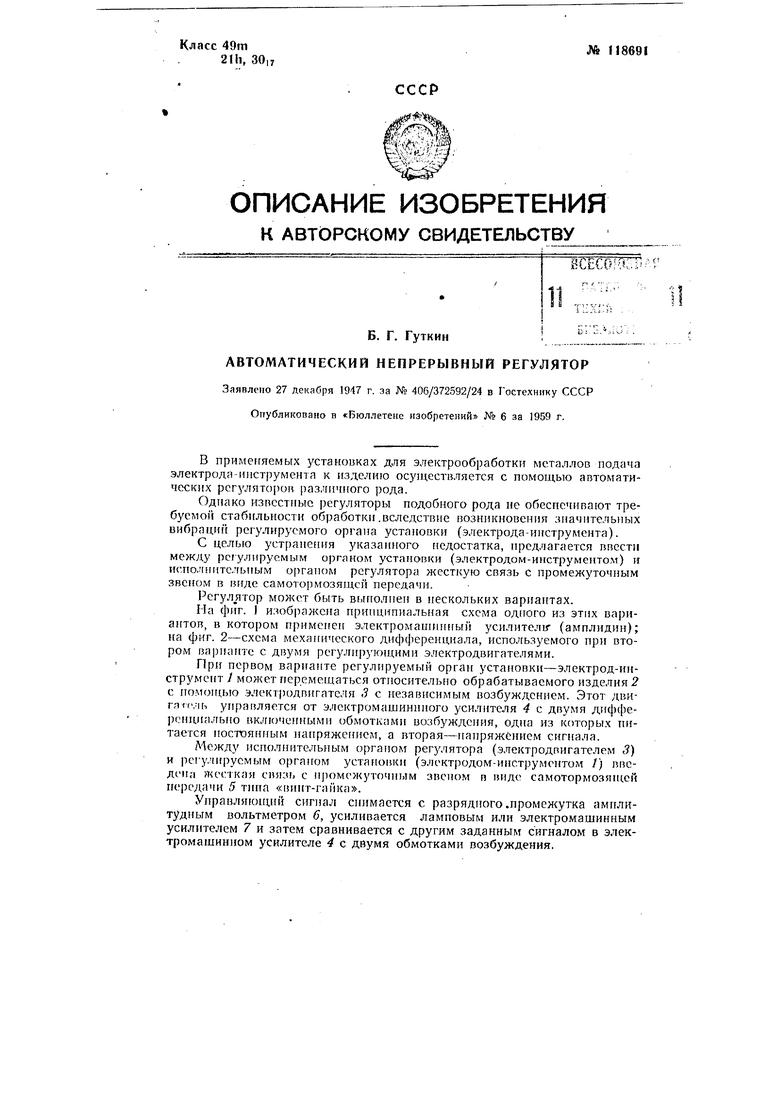
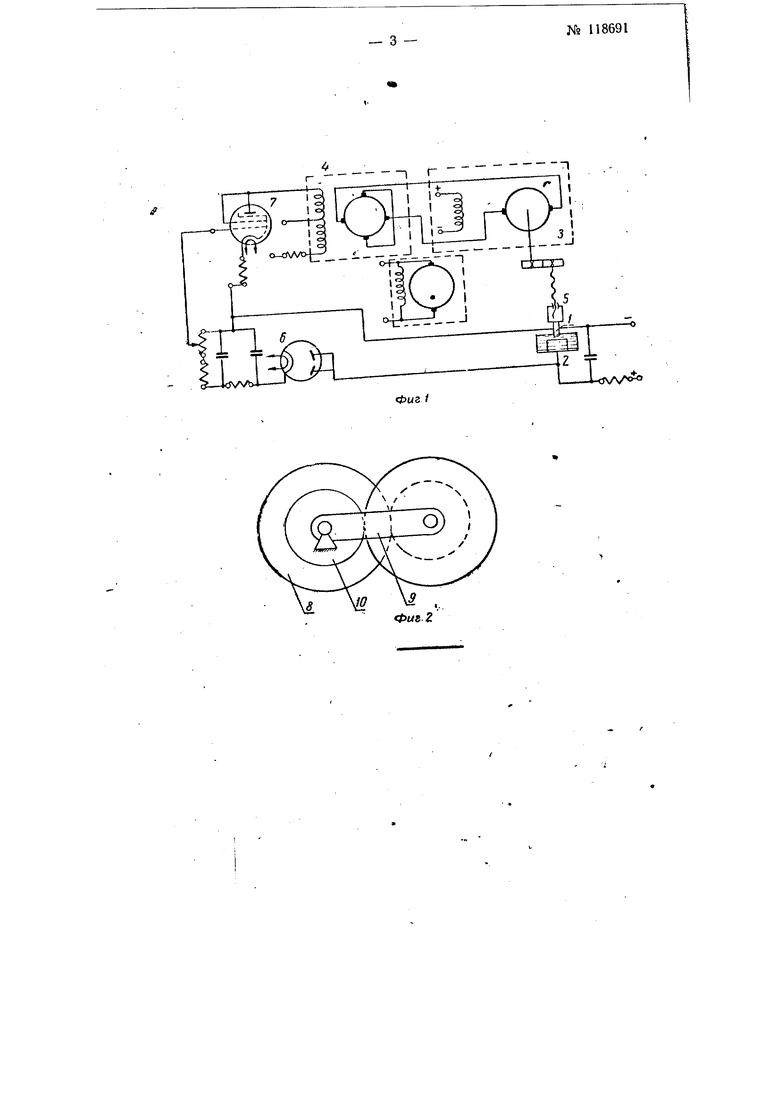
Иа фнг. I изоб|5ажена принципиальная схема одного из этих ва1)иантов, в котором прнмегген электромашинный усилители (амплидин); на фиг. 2-схема механического дифференциала, используемого при втором с двумя регу.;гируюи1;имн электродвигателями.
При первом варианте регулируемый орган установки-электрод-инструмент / может перемещаться относительно обрабатываемого изделия 2 с номон|ью электродвигателя 3 с независимым возбуждением. Этот двиглгсль управляется от электромащиннного усилителя 4 с двумя днфферонциально нкл1оче1гнымн обмотками возбуждения, одна из которых питается иостоянггым наиряжением, а вторая-напряжением сигнала.
А1ежду пспол1П1тельным оргапом регулятора (электродвигателем 3) и pei-улируемым оргаиом установки (электродом-инструментом /) введена жесткая связь с промежуточным звеном п виде самотормозянсей передачи 5 тнпа «(яшт-гайка.
Управляющий сигнал снимается с разрядного.промежутка амплитудным вольтметром 6, уснливается ламповым или электромашинным усилителем 7 и затем сравнивается с другим заданным сигналом в электромашинном усилителе 4 с двумя обмотками возбуждения,
№118091- 2 -
Сравнение текущего сигнала, снимаемого с разрядного промежутка, и заданного сигнала можно осушестпнть не в электромашиниом усилн- те.чс, а нспос.редственно в прнводпом дпкгателе 3. В этом случае он должен HMcib дифференциальньте обмотки иозбуждеиня, одна из которых питается постоянным наиряжснием, а другая- напряжением сигнала.
Для этой цели может быть также применен механический дифференциал (фнг. 2), одно из колес « которого приводится во вращение электродвигателем с независимым возбуждением, водило 9-электродвигателем с возбуждением, управляемым текун1,им сигналом, а ведомое колесо 10 приводит движение ходопо винт ползуна, иесун.1,его электродинструмент, В таком дифференциале сравниваются момеггты двух -дви ателе1г, кото|)ые преобразуют независимый и текуиий сигнал в соответствующие вращагоп;ие момеиты.
Предмет изобретения
1.Лптоматичпский ншрррьнпиий регулятор подачи элоктродп-инструмопта в установках для электрообработк1Г металлов, отличаюП1 (1 и с я -кМ, что, с целью исключения резких вибраций регулируемого органа, между последиим и исполнительным органом регулятора применена жесткнп связь с промежуточным звеном в виде самотормозящейся передачи.
2.Регулятор ио п. 1, отличающийся тем, что, с целью осуществлеиия плавного перехода выходной скорости регулятора через нулевое значение, в нем применены два электродвигателя, в которых снимаемый текущий сигнал и независимый сигнал преобразуются в крутящие моменты, сравниваемые между собой.
Г. Применение в регуляторе по пп. 1 и 2 механического дифференциал;), одио из Ko.iec которого врап1.ается электродвигателем с независимым возбуждением, второе-электродвигателем с возбуждением, упрагз;1яемым текущим сигналом, а третье (водило) связано с регулируемым оргапом.
4.Применение в регуляторе по п. 1 амплидина с двумя дифференциально включенг{ыми обмотками возбуждеиия, одна из которых питается постоянным напряжением, а вторая-напряжением сигнала.
5.Применение в регуляторе по п. 1 щунтового электродвигателя с двумя обмотками возбуждения, одна из которых питается постоянным напряжением, а вторая-напряжением сигнала.
6.Применение в регуляторе по пп. 1-5 для усиления величины текущего сигнала лампового или электромашинного усилителя.