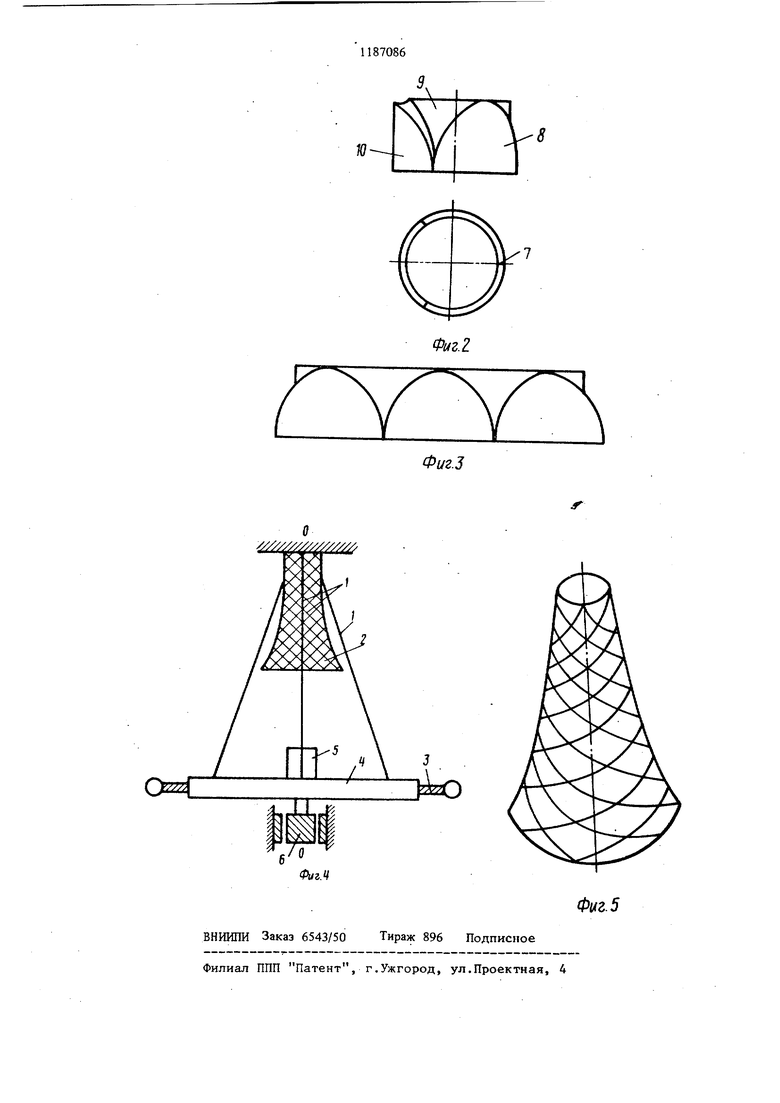
ИзобретенисГ относится к измерительной технике и может быть использовано для задания гармонических угловых и линейных ускорений при градуировке акселерометров. Целью изобретения является повышение точности и расширение ртапазона воспроизво димых rapMOHHijecKKx ускорений. На фиг. 1 представлена конструкция уста новки, первый вариант; на фиг. 2 - конструкция направляющего устройства, используемого в первом варианте установки; на фиг. 3 - развертка боковой поверхно ти направляющего устройства первого вариан та установки; на фиг. 4 - конструкция установки, второй вариант; .на фиг. 5 - ко струкция направляющего устройства, используемого во втором варианте установки. Установка по первому варианту (фиг. 1) содержит шнуры 1 (например, капроновый фал), направляющее устройство 2, плечи 3, платформу 4, с установленным на ней поверяемым угловым или линейным акселерометром 5, электродвигатель 6, ротор которо го соосио связан с платформой 4, а статор укреплен на корпусе установки. Платформа с расположенным на ней акселерометром 5, плечами 3 и ротором электродвигателя 6 подвещена на шнурах 1 одинаковой длины к верхней части корпуса установки, при этом точки крепления шнуров 1 расположены в средней части начальных участков 7 пазов направляющего устройства 2 (фиг. 2), укреп ленного в верхней части корпуса установки соосно с платформой 4. Направляющее устройство (фиг. 2) выполнено в виде двух концентрических цилиндров 8 и 9, при этом границей раздела между ними являются пазы 10, которые представляют собой три одинаковых соприкасающихся в основании параболы, расположенные на развертке внеш него 1шлиндра (фиг. 3). Установка гго второму варианту (фиг. 4) содержит те же узлы, что и установка по первому варианту но при этом шнуры 1 ориентированы под углом к оси платформы, а направляющее устройство 2 выполнено в виде осесимметричного усеченного конуса с ветвью параболы в качестве образующей. Пазы направляющего устройства расположены на его боковой поверхности и выполнены в форме трехзаходной двунаправленной винтовой линии (фиг. 5). Назначением плеч 3 является балансировк и регулировка момента инерЩ1И подвижных частей установки, что необходимо для воепроизведения гармонических колебаний в ши роком частотном диапазоне в резонансном режиме. Принцип действия установок, описанных в первом и втором вариантах, не изменяется, если направляющие устройства будут расположены на платформах. Оба варианта предлагаемой установки работают одинаково, при этом платформа 4 совершает крутильные и линейные колебания относительно и вдоль оси 00. Возбуждение колебаний производится с помощью электродвигателя 6. При вращении платформы 4 шнуры 1 изгибаются и фиксируются пазами направляющего устройства 2, что обеспечивает высокую степень приближения задаваемых угловых и линейных колебаний платформы к гармоническому закону в широком диапазоне колебаний по сравнению с известной установкой. Первый вариант предлагаемой установки обеспечивает угловые колебания в диапазоне углов 0-F/3, второй - О-П , так как направляющее устройство.второго варианта установки снабжено пазами, выполненными в виде винтовых линий, каждая из которых содержит не менее шести витков. Однако при этом установка во втором варианте обладает несколько большими потерями колебательной энергии на трение. Известно, что колебания физического маятника, лежащего в основе установки, не являются гармоническими при углах отклонения, больашх 8 . Использование направляющего устройства позволяет обеспечить инвариантность периода колебаний маятника от угла отклонения за счет изменения приведенной длины маятника в процессе колебаний, так как длина шнура, фиксированного в пазах направляющего устройства, пропорциональна углу поворота платформы, зависит от формы пазов и вычитается из обшей длины шнуров, меняя, тем самым, приведенную длину маятника. Коэффициенты уравнения, описывающего форму пазов направляющего устройства, не сложно определить с учетом указанного фактора. Формой пазов направляющего устройства первого варианта и образующей конуса второго варианта приближенно выбрана парабола, поскольку именно эта кривая достаточно хорошо аппроксимирует форму пазов на развертке боковой поверхности направляющего устройства первого варианта и изменение радиуса винтовой линии пазов второго варианта. Предлагаемая установка позволяет воспроиз водить гармонические угловые ускорения в диа- . пазоне амплитуд 0,8-1 б рад/с и частот 0,90,008 Гц с погрешностью не более 1%. Диапазон амплитуд гармонических линейных ускорений составляет 10 -1 м/с с погрешностью не выше 3 и 5% соответственно для первого и второго вариантов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для воспроизведения постоянных и низкочастотных гармонических линейных ускорений | 1978 |
|
SU731383A1 |
| Устройство для испытаний угловых акселерометров | 1979 |
|
SU998958A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| Устройство для воспроизведения постоянных и низкочастотных гармонических ускорений | 1991 |
|
SU1818591A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| Установка для воспроизведения ускорений | 1982 |
|
SU1062616A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МЕХАНИЧЕСКИМИ КОЛЕБАНИЯМИ КАЧЕЛЕЙ, ВЫПОЛНЕННЫХ С ВОЗМОЖНОСТЬЮ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ОДНОЙ ПЛОСКОСТИ | 2022 |
|
RU2806350C1 |
| Устройство для воспроизведения инфранизкочастотных гармонических ускорений | 1990 |
|
SU1763989A2 |
| Интегрирующий акселерометр | 1980 |
|
SU883744A1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
1. УСТАНОВКА ДЛЯ ЗА.ЦАНИЯ ГАШОНИЧЕСКИХ УСКОРЕНИЙ, содержащая корпус и подвешенную в нем на трех гибких Шнурах одинаковой длины платформу, на которой расположены посадочное -место градуируемого акселерометра и узлы балансировки и регулировки момента инерции платформы, отличающаяся тем, Что, с целью повышения точности и расщирения диапазона воспрюизводимых гармонических ускорений, в нее введены направляющее устройство и приводной электродвигатель, ротор и статор которого укреплены соответственно на платформе соосно с осью задания ускорений и в корпусе установки, а наЛравляюшее устройство укреплено в верхней части корпуса соосно с платформой. 2.Установка по п. 1,отличающ а я с я тем, что направляющее устройство выполнено в виде осесимметричного цилиндрического тела вращения с тремя равномерно расположенными на его боковой поверхности симметричными пазами, в серединах которых укреплены верхние концы шнуров. 3.Установка по п. 1, о т л и ч а ю сл щ а я с я тем, что направляющее устройс ство выполнено в виде осесимметричного усеченного конуса, а расположенные на его боковой поверхности пазы выполнены в форме трехзаходной двунаправленной многовитковой винтовой линии. СМ. 5
| Выгодский В | |||
| Я | |||
| Справочник по высшЬй математике | |||
| М.: Наука, 1975 | |||
| с | |||
| Прибор для заливки подшипников баббитом | 1922 |
|
SU801A1 |
| Раевский Н | |||
| П | |||
| Метода | |||
| экспериментпьного исследоваиия механических параметров машин | |||
| М.: АН рССР, 1952, с | |||
| Приспособление для воспроизведения изображения на светочувствительной фильме при посредстве промежуточного клише в способе фотоэлектрической передачи изображений на расстояние | 1920 |
|
SU172A1 |
