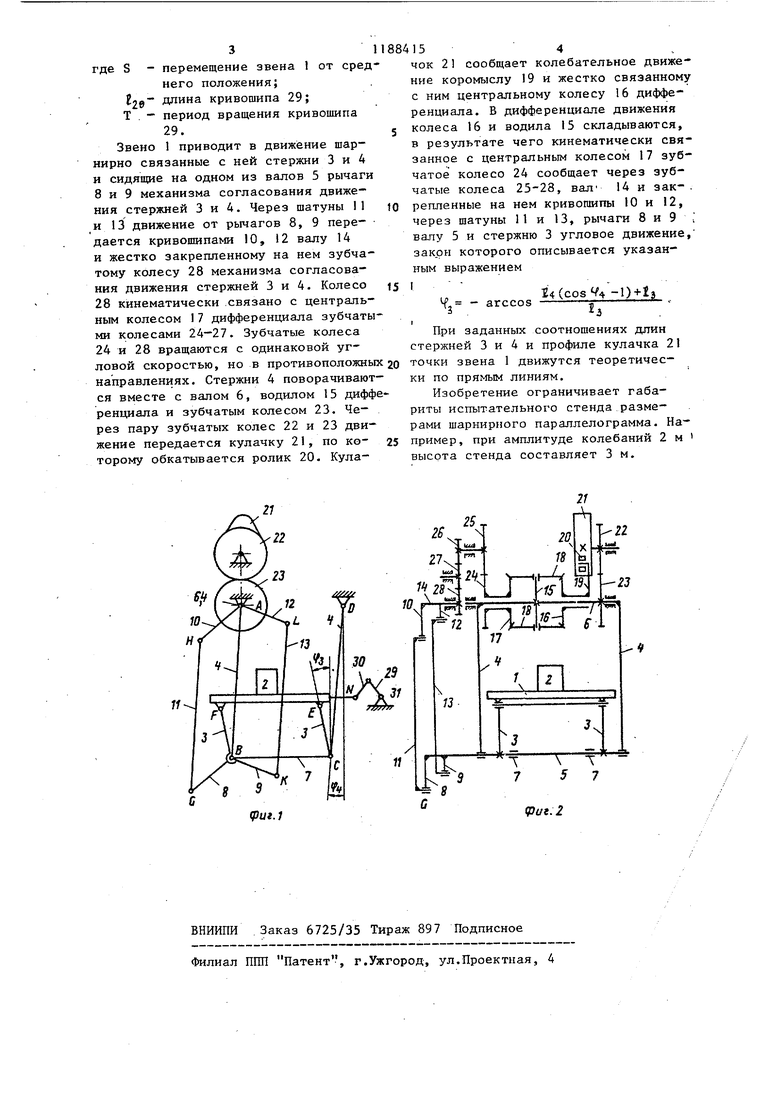
Изобретение относится к машиностроению, а именно к направляющим механизмам прямолинейного движения, в частности к крупногабаритным маят никовым стендам для испытаний аппаратуры, и может быть использовано в любой области техники. Цель изобретения - уменьшение га баритов и повьш1ение точности прямолинейно-поступательного движения пл формы испытательного стенда. Это по воляет снизить вес и металлоемкость стенда, устраняет потребность в спе циальных производственных помещения и повышает качество испытаний. На фиг. показана схема механиз ма, примененного в маятниковом испытательном стенде; на фиг. 2 - се чение по продольной оси. Механизм содержит прямолинейно-п ступательно движущееся звено I, на котором размещен испытуемый объект 2. Звено 1 подвешено к основанию (не показано ) на четырех стержнях 3 и четырех стержнях 4, образующих двойной шарнирный параллелограмм ABCD-BCEF. Стержни 3 и 4 попарно связаны между собой двумя валами- 5 через шарниры В и С. Концы А и D стержней 4 попарно жестко связаны валами 6. Валы 5 соединены между со бой тягами 7, С концом.одного из валов 5 жестко связаны рычаги 8 и 9 устройства согласования движения стержней 3 .и 4. Рычаг 8 шарнирно связан с кривошипом 10 шатуном II, а рычаг 9 кривошипом 1 2 через шатун 13. Кривошипы 10 и 12 жестко закрепленьГ на валу 14, соосным с. валом 6. На валу 6 жестко закреплено водило 15 зубчатого дифференциала, состоящего из центральных колес 16, 17 и сателлитов 18, С центральным колесом 6 жестко связано коромысло 19 с роликом 20, взаимодействующим с кулачком 2. Кулачок 21 через зубчатые колеса 22, 23 и вал 6 кинематически связан с водилом 15 диффере циала, а его центральное колесо 17 через зубчатые колеса 24, 25,26,27, 28 и вал 14 - с кривошипами 10 и 12 Звено 1 через кривошип 29 и шатун 30 одинаковой длины связано с электродвигателем 31. Размеры звеньев механизма определяются следующими зависимостями. 52 Дпины стержней 3 и 4 удовлетвояют соотношению Ьь . I - cos f/ 1 - cos Чс ft I 00 I g де fy длина стержня 3; Lg - длина стержня 4; t/ и углы максимального отклоения стержней 3 и 4 от среднего поожения (например, от вертикали при оризонтальном расположении звена 1J. Углы Чд и /е удовлетворяют соотошению Y i . Чо , где i о- - пегд - -L, tB, 1-де i едаточное отношение в схеме от тержня 4 к центральному колесу 17 ри остановленном центральном колее 16. Профиль кулачка 21 описывается в ентральной системе координат радисом-вектором,(cos4 -1 f. ki- -rtrccos + 23 28 .t 24 2fe полярным углом R2+eJ- 2 + arccos --NVCCOS RO де R, -минимальный радиус с теоретического профиля кулачка;-длина коромысла 19; -расстояние между осями вала 6 и кулачка 21; -угол поворота стержней 4; Р. 3 и Ед- длина стержней 3 к ; . 28 соответственно число зубьев колес 22 - 26 и 28. Для обеспечения прямолинейности движения звена 1 по всей заданной длине перемещения значения углов Ч, и 1 поворота стержней 3 и 4 от среднего положения должны соответствовать условию E4(cos44-l)+t3 4j - arccos Механизм работает следующим образом. При включении электродвигателя 3I кривошип 29 и шатун 30 сообщают звену 1 движение по синусоидальному закону,Ь - Z -tofl sin. ;;: t ц 3 где S - перемещение звена 1 от сред него положения;. Е2е длина кривощипа 29; Т . - период вращения кривошипа Звено 1 приводит в движение шарнирно связанные с ней стержни 3 и 4 и сидящие на одном из валов 5 рычаги 8 и 9 механизма согласования движения стержней 3 и 4. Через щатуны 11 и 13 движение от рычагов 8, 9 передается кривошипами 10, 12 валу 14 и жестко закрепленному на нем зубчатому колесу 28 механизма согласования движения стержней 3 и 4. Колесо 28 кинематически .связано с центральным колесом 17 дифференциала зубчаты ми колесами 24-27. Зубчатые колеса 24 и 28 вращаются с одинаковой угловой скоростью, но в противоположны направлениях. Стержни 4 поворачивают ся вместе с валом 6, водилом 15 дифф ренциала и зубчатым колесом 23. Через пару зубчатых колес 22 и 23 движение передается кулачку 21, по которому обкатывается ролик 20. Кула21
25
put.2 154 чок 21 сообщает колебательное движение коромыслу 19 и жестко связанному с ним центральному колесу 16 дифференциала. В дифференциале движения колеса 16 и водила 15 складываются. в результате чего кинематически связанное с центральным колесом 17 зубчатое колесо 24 сообщает через зубчатые колеса 25-28, вал 14 и зак-. репленные на нем кривошипы 10 и 12, через щатуны 11 и 13, рычаги 8 и 9 валу 5 и стержню 3 угловое движение, закон которого описывается указанным выражением t4(cosV4 -1)+1з 4, - arccos При заданных соотнощениях длин стержней 3 и 4 и профиле кулачка 21 точки звена 1 движутся теоретичес- ки по прямым линиям. Изобретение ограничивает габариты испытательного стенда размерами шарнирного параллелограмма. Например, при амплитуде колебаний 2 м высота стенда составляет 3 м.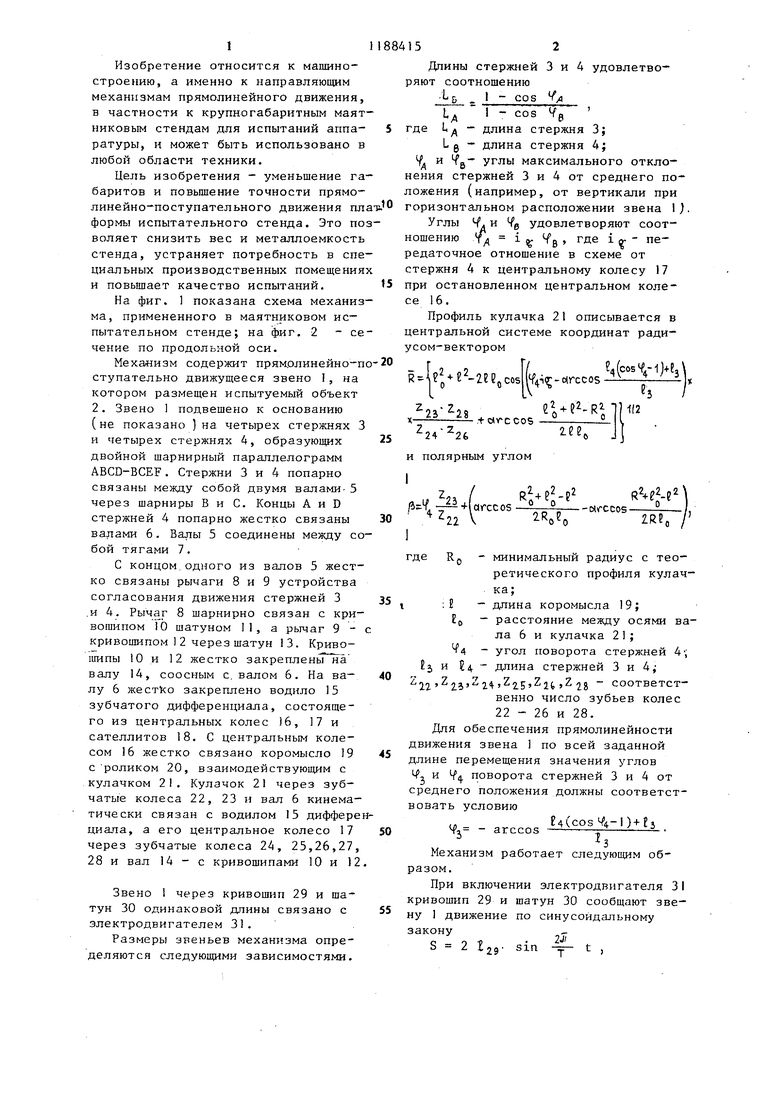
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд гармонических колебаний | 1990 |
|
SU1740829A1 |
| ДИНАМИЧЕСКИЙ ИСПЫТАТЕЛЬНЫЙ СТЕНД | 1994 |
|
RU2080604C1 |
| ИСПЫТАТЕЛЬНЫЙ ДИНАМИЧЕСКИЙ СТЕНД | 1994 |
|
RU2080603C1 |
| Стенд гармонических колебаний | 1984 |
|
SU1210103A1 |
| Преобразователь непрерывного вращения в одностороннее прерывистое | 1990 |
|
SU1763768A1 |
| Рычажно-зубчатый механизм с остановками | 1987 |
|
SU1493838A1 |
| Металлорежущий станок | 1974 |
|
SU519315A1 |
| Двухкомпонентный низкочастотный вибростенд | 1981 |
|
SU1013795A1 |
| Замкнутая передача | 1990 |
|
SU1763771A1 |
| Грейферный перекладчик к штамповочному прессу | 1983 |
|
SU1159699A1 |
РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ, содержащий движущееся прямолинейноаоступательноезвено, двойной шарнирный параллелограмм, взаимодействую- . щую с ним через рычажную систему зубчатую передачу и связанный со звеном крйвошипно-шатунный привод, отличающийся тем, что, с целью уменьшения габаритов и повышения точности, кривошип и шатун привода выполнены с одинаковой длиной, длины поворотных звеньев параллелограмма выбраны из соотношения Ь а 1 - cos Чд ид 1 - COS- 1/6 где и g максимальные углы 6тклонения соответствующих звеньев от среднего положения, а механизм снабжен зубчато-кулачковым устройством согласования движения, включающим зубчатый дифференциал, в котором одно центральное колесо через зубчатую передачу и рычажную систему взаимодействует с параллелограммом, коро(/ мысло, ЁГзаимодействующее с другим центральным колесом дифференциала, С кулачок и зубчатую йередачу, связывающую кулачок с водилом дифференциала .
| Артоболевский И.И | |||
| Механизмы в современнойтехнике | |||
| М.: Наука, 1979, т.З, с.80, рис.1682. |
