ходы датчиков линейной и угловой . адреса блока управления подключена координаты соединены свторым входом к вторым адресным входам первого данных первого мультиплексора, шина и второго мультиплексоров.
1190253
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство сбора дефектоскопической информации | 1985 |
|
SU1298719A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ СИГНАЛОВ АКУСТИЧЕСКОЙ ЭМИССИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2684443C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2009 |
|
RU2389981C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2009 |
|
RU2406979C2 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2079150C1 |
| ЦИФРОВОЙ ДАЛЬНОМЕР | 1992 |
|
RU2069003C1 |
| Способ определения места повреждения линий электропередачи и связи и устройство для его осуществления | 1986 |
|
SU1348756A1 |
| ТЕЛЕВИЗИОННАЯ СИСТЕМА ВЫСОКОГО РАЗРЕШЕНИЯ | 1996 |
|
RU2127961C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ДЕФЕКТОВ ТРУБОПРОВОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2089896C1 |
| СИСТЕМА ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ | 1993 |
|
RU2072546C1 |
СИСТЕМА ДЛЯ АВТОМАТИЧЁСКОП ДЕФЕКТОМЕТРИН, содержащая датчики линейной и угловой координаты, измерительньп блок, первый вход которого соединен с -первым выходом синхронизатора, второй и третий входы которого подключены к первому и вто,рому выходам системы для автоматической дефектоскопии, вход которой с вторым выходом синхронизатора, блок управления, шина адреса которого соединена с первым входом интерфейсного и запоминающего блоков, устройство вывода, вход которого подключен к выходу интерфейсного блока, игина данных блока управления подключена к вторым входам интерфейсного и запоминающего блоков и к выходу запоминающего блока третий вход которого соединен с выходом Чтение блока управления, отличающаяся тем, что, с целью повьпиения достоверности контроля и скорости обработки сигнялов системой, в нее введены счетчик ;i,;peca, счетный трипер, элемент .ИЛИ, одновибратор, первый мультиплексор, первьтй блок памяти координат, а в каждый измерительный канал введены второй мультиплексор и второй блок памяти, выход которого подключен к шине данных блока управления, первый вход - к выходу второго мультиплексора, а второй вход к первому входу первого блока памяти координат данного канала, к вторым входам блоков памяти остальных измерительных каналов и к третьему входу запоминагацего блока, четвертый вход которого соединен с i третьим выходом интерфейсного блока, с выходом Запись блока управления Ш и с первым входом Запись первого и второго мультиплексоров, выход Подтверждение захвата блока управления подключен к управляющим входам первого и второгь мультиплексоров, через счетчик адреса подключен к первому входу адреса первого (Г и второго мультиплексоров, а через одновибратор - к первому входу элею мента ИЛИ и к вторым входам Запись О1 первого и второго мультиплексоров, ОО первый выход измерительного блока соединен с первым входом данных второго мультиплексора, второй выход с вторым входом элемента ИЛИ, выход которого через счетный триггер под ключен к входу Захват блока управления, выход первого мультиплексора соединен с вторым входом первого блока памяти, выход которого соединен с шиной данных йлока управления, с вторыми входами данных первого и второго мультиплексоров и с входом Чтение блока управления, вы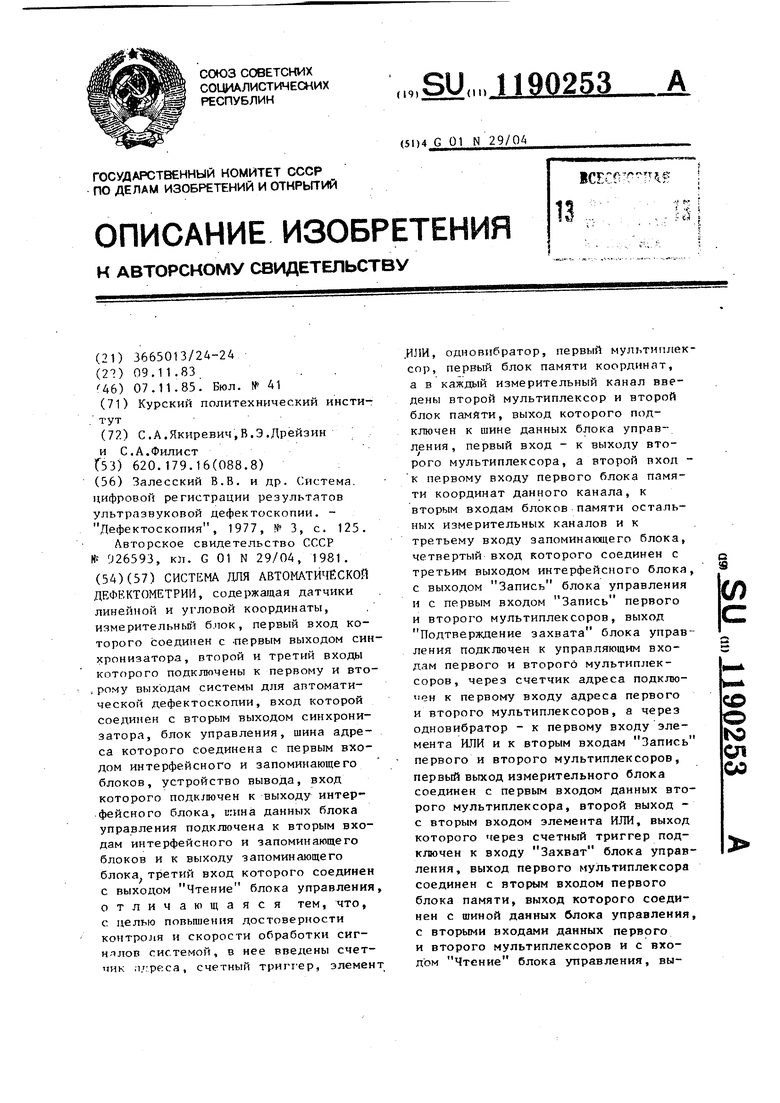
1, . .- . .. Изобретение относится к области ультразвуковой дефектоскопии и мож быть использовано совместно с первичной ультразвуковой аппаратурой для контроля протяжных изделий (трубы, прокат и т.д.) в различных отраслях машииостиоения. Производительность контроля в. целом существенно зависит от скоро ти. программного ввода микропроцессором в ЗУ через интерфейсный блок дефектоскопической информации. Осо бенно этот недостаток проявится в многоканальной системе при вводе каждого эхо-импульса (имеется в виду подключение измерительного бл ка к нескольким дефектоскопам). В то же время наличие информации о всей пачке эхо-импульсов и совмест ная обработка этих сигналов,, приня тых от разных каналов, значительно повышают достоверность контроля так как позволяют исключить ложные сигнллы помехи, производить класси фикацию и определение важных параметров дефекта. Ограниченная скорость программного ввода приводит снижению производительности контроля. Предположим,- что изве стиую систему хотят использовать для контроля труб со Ькоростыр V 4 м/мин, при П 4000 об/ми частоте зондирующих импульсов f 20 кГц и с числом каналов, равным четырем. Значения для V, , п выбраны из условия надежного обнаружения точечного дефект и пропорции между ними не должны меняться. Если в качестве вычислителя используется микропроцессор К580ИК80, то программа, реализующа ввод кода амплитуды зхо-импульса и угловой координаты в режиме векторного прерывания, будет длить 45 МКС. При Этом распределение вре мени по выполняемым функциям следующее; RSr реакция на векторное прерывание, 5 MKCJ LHlD - формирование адреса загрузки по номеру канала, 13 MKCJ. )Л2)Р ЭМРЛ - переход на считывание, информации с измерительного блока, 5 МКС; М+ОINAcJdfr - считывание в микропроцессор кода амплитуды эхо-импульса, 5 МКС; M+fMOVM , А - пересылка кода амплитуды в ЗУ по адресу загрузки, 3,5 мкс-, 2INX Н - инкрементирование адреса загрузки, 2,5 MKCj IN do/r - считывание в микропроцессор кода угловой коордршаты, 5 мкс; ,4 MOVM| А - пересылка кода угловой координаты по адресу загрузки, 3,5 MKCj Л - -51МХН - инкрементирование адреса загрузки,. 2,5 МКС и составляет . 45 МКС.. Таким образом, если не понизить частоту зондируемых импульсов, то при числе каналов более одного будет происходить крайне нежелательная потеря информации вследствие медленного ввода данных. Для четырех потеря информации не будет происходить, если частота 1/4 45-10 5,5 кГц. Так как пропорции между , п , { должны оставаться постоянными, то число оборотов упадет до п 1100 об/мин, а ско- . рость контроля -до ; 1,1 м/мин. Следовательно, для того, чтобы повысить достоверность контроля за счет обработки дефектоскопических данных, необходимо почти в 3,7 раза снизить скорость контроля.
Цель изобретения - повышение достоверности контроля при использовании многоканальных систем полного сбора и скорости обработки дефектоскопических сигналов системой.
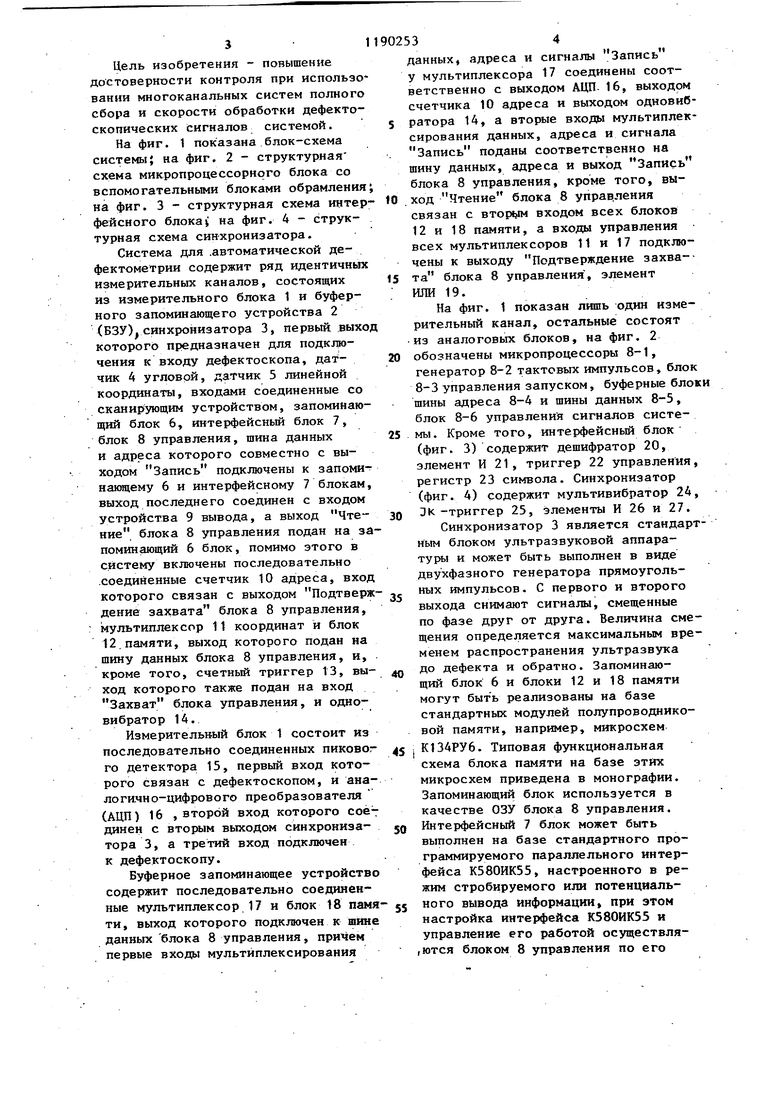
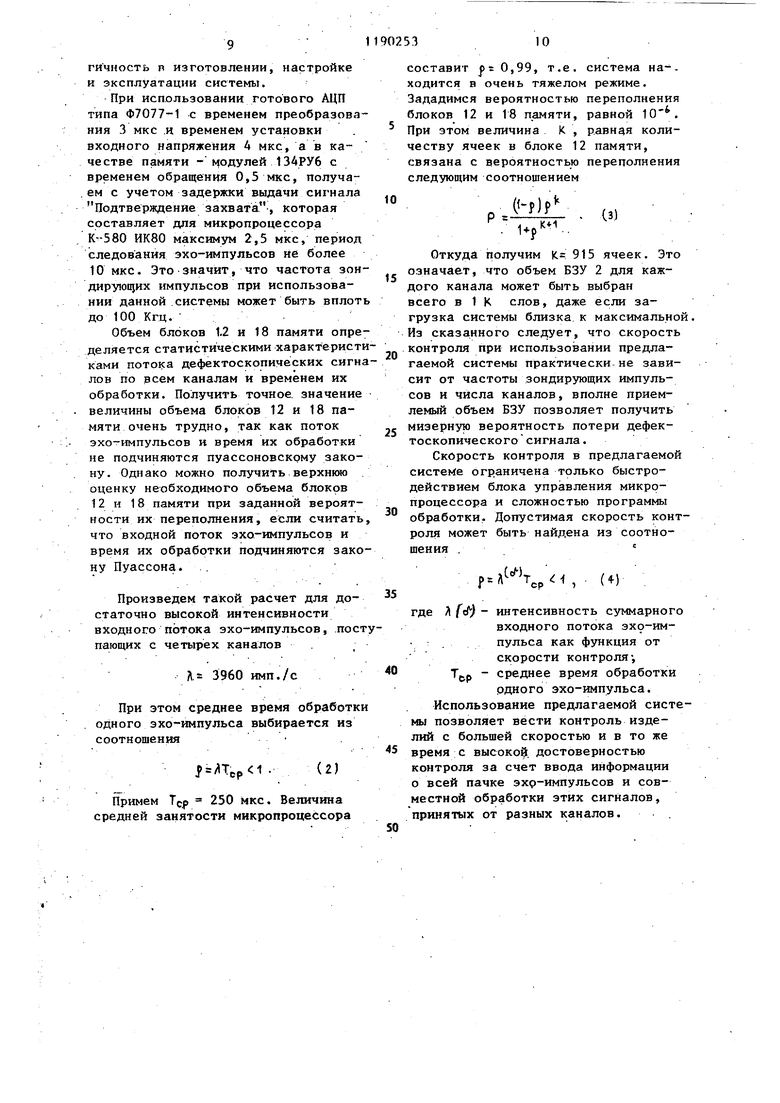
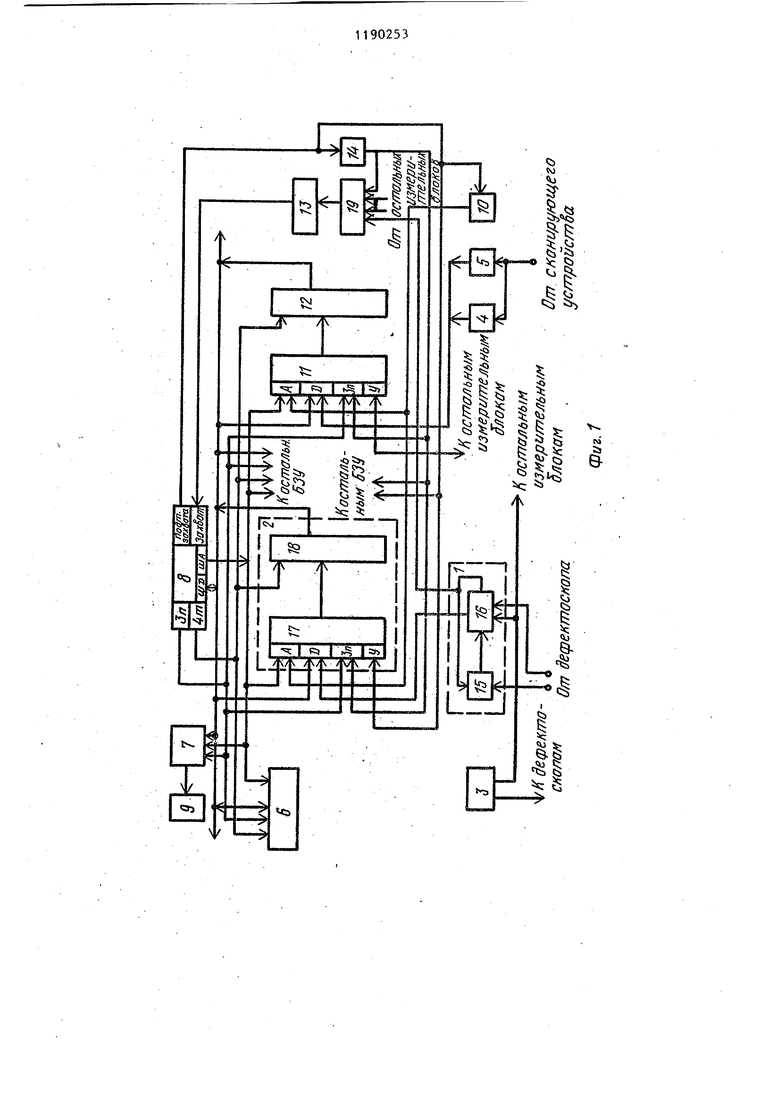
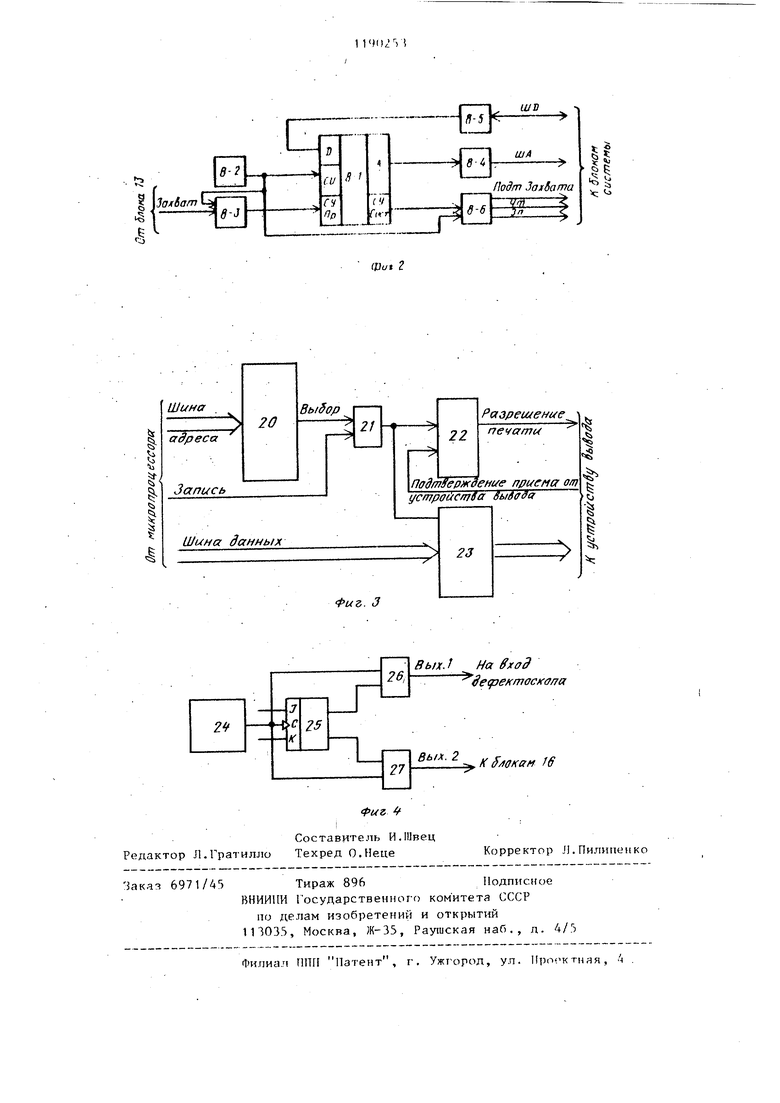
На фиг. 1 показана . блок-схема системы} на фиг, 2 - структурная схема микропроцессорного блока со вспомогательными блоками обрамления на фиг. 3 - структурная схема интерфейсного блокад на фиг. 4 - структурная схема синхронизатора.
Система для .автоматической дефектометрии содержит ряд идентичных измерительных каналов, состоящих из измерительного блока 1 и буферного запоминающего устройства 2 (БЗУ)синхронизатора 3, первый выхо которого предназначен для подклочения к входу дефектоскопа, датчик 4 УГЛОВОЙ, датчик 5 линейной координаты, входами соединенные со сканирующим устройством, запоминающий блок 6, интерфейсный блок 7, блок 8 управления, шина данных и адреса которого совместно с выходом Запись подключены к запоминающему 6 и интерфейсному 7 блокам, выход последнего соединен с входом устройства 9 вывода, а выход Чтение блока 8 управления подан на запоминающий 6 блок, помимо этого в систему включены последовательно .соединенные счетчик 10 адреса, вход которого связан с выходом Подтверждение захвата блока 8 управления, мультиплексор 11 координат и блок 12,памяти, выход которого подан на шину данных блока 8 управления, и, кроме того, счетный триггер 13, выход которого также подан на вход Захват блока управления, и одновибратор 14.
Измерительный блок 1 состоит из последовательно соединенных пиковог го детектора 15, первый вход которого связан с дефектоскопом, и аналогично-цифрового преобразователя (АЦП) 16 , второй вход которого соединен с вторым выходом синхронизатора 3, а третий вход подключен к дефектоскопу.
Буферное запоминающее устройство содержит последовательно соединенные мультиплексор 17 и блок 18 памяти, выход которого подк.пючен к шине данных блока 8 управления, причем первые входы мультиплексирования
данных, адреса и сигналы Запись у мультиплексора 17 соединены соответственно с выходом АЦП- 16, выходом счетчика 10 адреса и выходом одновибратора 14, а вторые входы мультиплексирования данных, адреса и сигнала Запись поданы соответственно на шину данных, адреса и выход Запись блока 8 управления, кроме того, выход Чтение блока 8 управ.ления связан с BTopijiM входом всех блоков 12 и 18 памяти, а входы управления всех мультиплексоров 11 и 17 подключены к выходу Подтверждение захва-та блока 8 управления , элемент ИЛИ 19.
На фиг. 1 показан лишь один измерительный канал, остальные состоят из аналоговых блоков, на фиг, 2
обозначены микропроцессоры 8-1,
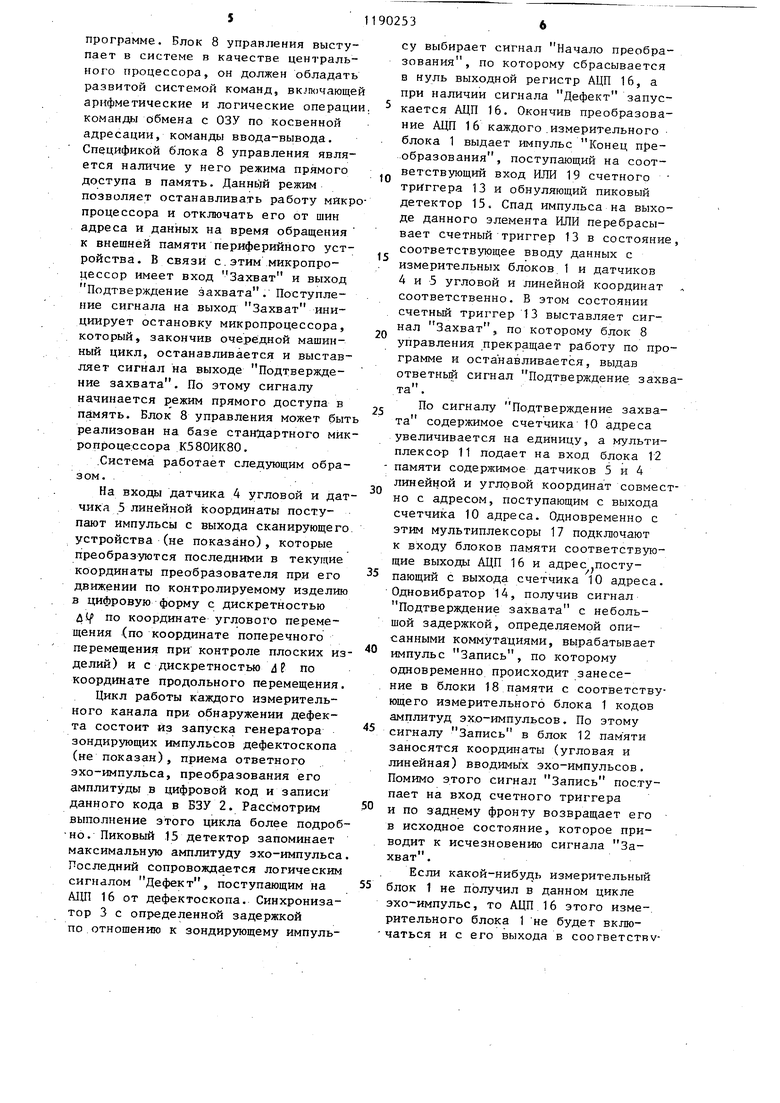
генератор 8-2 тактовых импульсов, блок 8-3 управления запуском, буферные блоки шины адреса 8-4 и шины данных 8-5, блок 8-6 управления сигналов системы. Кроме того, интерфейсный блок (фиг. 3) содержит дешифратор 20, элемент И 21, триггер 22 управления, регистр 23 символа. Синхронизатор (фиг. 4) содержит мультивибратор 24,
DК -триггер 25, элементы И 26 и 27.
Синхронизатор 3 является стандартным блоком ультразвуковой аппаратуры и может быть выполнен в виде двухфазного генератора прямоугольных импульсов. С первого и второго выхода снимают сигна.гал, смещенные по фазе друг от друга. Величина смещения определяется максимальным временем распространения ультразвука
до дефекта и обратно. Запоминающий блок 6 и блоки 12 и 18 памяти могут быть реализованы на базе стандартных модулей полупроводниковой памяти, например, микросхем
j К134РУ6. Типовая функциональная схема блока памяти на базе этих микросхем приведена в монографии. Запоминающий блок используется в качестве ОЗУ блока 8 управления.
Интерфейсный 7 блок может быть
выполнен на базе стандартного программируемого параллельного интерфейса К580ИК55, настроенного в режим стробируемого или потенциального вывода информации, при этом настройка интерфейса К580ИК55 и управление его работой осуществля,ются блоком 8 управления по его
программе. Блок 8 управления выступает в системе в качестве центрального процессора, он должен обладать развитой системой команд, вк.почающе арифметические и логические операци команды обмена с ОЗУ по косвенной адресации, команды ввода-вывода. Спецификой блока 8 управления является наличие у него режима прямого доступа в память. Данный режим позволяет останавливать работу микрпроцессора и отключать его от шин адреса и данных на время обращения к внешней памяти периферийного устройства. В связи с.этим микропроцессор имеет вход Захват и выход Подтверждение захвата. Поступление сигнала на выход Захват инициирует остановку микропроцессора, который, закончив очерёдной машинный цикл, останавливается и выставляет сигнал на выходе Подтверждение захвата. По этому сигналу начинается режим прямого доступа в память. Блок 8 управления может быт реализован на базе стандартного микропроцессора К580ИК80.
.Система работает следующим образом.
На входы датчика 4 угловой и датчика 5 линейной координаты поступают импульсы с выхода сканирующего устройства (не показано), которые преобразуются последними в текущие координаты преобразователя при его движении по контролируемому изделию в цифровую форму с дискретностью if по координате углового перемещения (по координате поперечного перемещения при контроле плоских изделий) и с дискретностью 4 по координате продольного перемещения.
Цикл работы каждого измерительного канала при обнаружении дефекта состоит из запуска генератора зондирующих импульсов дефектоскопа (не показан), приема ответного эхо-импульса, преобразования его амплитуды в цифровой код и записи данного кода в БЗУ 2. Рассмотрим выполнение этого цикла более подроб но. Пиковый 15 детектор запоминает максимальную амплитуду эхо-импульса оследний сопровождается логическим сигналом Дефект, поступающим на А1Ш 16 от дефектоскопа. Синхронизатор 3 с определенной задержкой по отношению к зондирующему импульсу выбирает сигнал Начало преобразования, по которому сбрасывается в нуль выходной регистр АЦП 16, а при наличии сигнала Дефект запускается АЦП 16. Окончив преобразование АЦП 16 каждого.измерительного блока 1 выдает импульс Конец преобразования, поступающий на соответствующий вход ИЛИ 19 счетного триггера 13 и обнуляющий пиковый детектор 15. Спад импульса на выходе данного элемента ИЛИ перебрасывает счетный триггер 13 в состояние соответствующее вводу данных с измерительных блоков 1 и датчиков 4 и 5 угловой и линейной координат соответственно. В этом состоянии счетный триггер 13 выставляет сигнал Захват, по которому блок 8 управления прекращает работу по программе и останавливается, выдав ответный сигнал Подтверждение захв,та.
По сигналу Подтверждение захвата содержимое счетчика 10 адреса увеличивается на единицу, а мультиплексо-р 11 подает на вход блока 12 памяти содержимое датчиков 5 и 4 линейной и угловой координат совмесно с адресом, поступающим с выхода счетчика 10 адреса. Одновременно с этим мультиплексоры 17 подключают к входу блоков памяти соответствующие выходы АЦП 16 и адрееJпоступающий с выхода счетчика 10 адреса Одновибратор 14, получив сигнал Подтверждение захвата с небольшой задержкой, определяемой описанными коммутациями, вырабатывает импульс Запись, по которому одновременно происходит занесение в блоки 18 памяти с соответствующего измерительного блока 1 кодов амплитуд эх.о-импульсов. По этому сигналу Запись в блок 12 памяти заносятся координаты (угловая и линейная) вводимых эхо-импульсов. Помимо этого сигнал Запись пос.тупает на вход счетного триггера и по заднему фронту возвращает его в исходное состояние, которое приводит к исчезновению сигнала Захват.
Если кaкoй-нибy :|ь измерительный блок 1 не получил в данном цикле эхо-импульс, то АЦП 16 этого измерительного блока 1 не будет включаться и с его выхода в соогветствующий блок памяти 18 будут записаны нули.
Таким образом, по одним и тем же адресам в блоках 18 памяти хранятся коды амплитуд эхо-импульсов или нулевые кода,- поступившие с соответствующих измерительных каналов в одном цикле.Координаты (угловая и линейная), относящиеся к этим кодам эхо-импульсов 5 хранятся по такому же адресу в блоке 12 памяти.
При отсутствии сигнала Захват блок 8 управления обменивается информацией с блоками 12 и 18 памяти через соответствующие мультиплексоры 11 и 17. Работа блока 8 управления заключается в последовательном опросе ячеек блоков 12 и 18 памяти с целью формирования многомерного массива признаков, по которому происходит классификация и метрия дефектов в соотношении с математическими моделями, хранимыми в виде программ в запоминающем блоке 6. После обработки всей информации, относящейся к одному изделию, блок 8 уцравления через интерфейсный блок 7 выводит результаты контроля в .виде технического паспорта контролируемого изделия на устройство 9 вывода.
Рассмотрим .более подробно процесс формирования многомерных массивов признаков. Координаты эхоимпульсов, хранимые в блоке 12 памяти, относятся к первому измepитeл ному каналу. Для остальных каналов соответствующие координаты получают путем коррекции хранимых координат , производимой блоком 8 управления. Последний склеивает эхоимпульсы по каждому каналу, имеющие равные или отличающиеся на единицу координаты и одинаковые линейные координаты. Таким образом формируется пачка кодов эхо-импульсов, характеризующая одно сечение дефек.т Затем микропроцессоре-выделяет значение для математической модели дефектов, признаки данной пачки эхо-импульсов, например, количество импульсов в пачке, превьшающих-некоторые уровни дискриминации, скорость нарастания и спада амплитуд, максимальная амплитуда эхо-импульса и т.д.
Помимо этого фиксируются координаты начала и конца пачки эхо-импулсов. Пачки, у которых угловые координаты пересекаются, а линейные отличаются на единицу, относятся блоком 8 управления к одному дефекту. В результате для любого дефекта блок 8 управления формирует массив значимых признаков по каждому каналу. Если это необходимо, производится дальнейшее сжатие информации с учетом полученных значений по каждому каналу,
В начальном состоянии все блоки памяти обнулены, поэтому появление ненулевого значения в ячейке блока
12памяти рассматривается блоком 8 управления как поступление очередной порции эхо-импульсов. Блок 8 управлен запоминает содержание этой ячейки в запоминающем блоке 6 и рассматривае его как координату. Далее эта ячейка блока 12 памяти обнуляется. Аналогично ненулевое содержимое ячеек блок
13памяти рассматривается блоком
8 управления как кода амплитуд эхоимпульсов, которые переписываются п ходу склеивания пачек эхо-импульс в запоминающем блоке 6. После этой перезаписи ячейки блока 18 памяти обнуляются микропроцессором. Описанным способом блок 8 управления различает информацию, записываемую в блоки 12 и 18 памяти.
Система для автоматической дефектометрии практически не накладывет никаких ограничений на скорость ввода дефектоскопической информации так как время ввода определяется быстродействием АЦП и блока памяти. При этом число каналов не влияет на скорость ввода информации. Блок управления микропроцессора в. данной системе прекращает свою работу лишь на время обращения к памяти при вводе порции эхо-импульсов. Все остальное время он занят описанной обработкой дефектоскопических данных, что также существенно для оценки производительности системы. Достоинством системы является ее регулярная структура и простота в осуществлении ввода данных в блоки 12 и 18 памяти, для управления которыми в системе используются счетный триггер 13, одновибратор
14и счетчик 10 адреса. Регулярност структуры и простота организации ввода данных влечет высокую технологичность в изготовлении, настройке и эксплуатации системы. При использовании готового АЦП типа Ф7077-1 с временем преобразова ния 3 МКС .и временем установки входного напряжения А мкс, а в качестве памяти - ь одулей 134РУ6 с временем обращения 0,5 мкс, получаем с учетом задержки выдачи сигнала Подтверждение захвата, которая составляет для микропроцессора К--580 ИК80 максимум 2,5 мкс, период следования эхо-импульсов не более 10 мкс. Это значит, что частота зон дирующих импульсов при использовании данной .системы может быть вплот до 100 КГЦ. Объем блоков 1.2 и 18 памяти опре деляется статистическими характерист ками потока дефектоскопических сигн лов по всем каналам и временем их обработки. Получить точное, значение величины объема блоков 12 и 18 памяти очень трудно, так как поток эхо импульсов и время их обработки не подчиняются пуассоновскому зако ну. Однако можно получить верхнюю оценку необходимого объема блоков 12 и 1В памяти при заданной вероятности их переполнения, если считат что входной поток эхо-импульсов и время их обработки подчиняются зак ну Пуассона. .. Произведем такой расчет для достаточно высокой интенсивности входного потока эхо-импульсов, пос пающих с четырех каналов . Л 3960 имп./с При этом среднее время обработк одного эхо-импульса выбирается из соотношения Примем TC|) 250 мкс. Величина средней занятости микропроцессора составит ргО,99, т.е. система на-. ходится в очень тяжелом режиме. Зададимся вероятностью переполнения блоков 12 и 18 памяти, равной 10. При этом величина К , равная количеству ячеек в блоке 12 памяти, связана с вероятностью переполнения следуюпшм соотношением Н)р Откуда получим |с 915 ячеек. Это означает, что объем БЗУ 2 для каждого канала может быть выбран всего в 1 К слов, даже если загрузка системы близка к максимальной. Из сказанного следует, что скорость контроля при использовании предлагаемой системы Практически-не зависит от частоты зондирующих импульсов и числа каналов, вполне приемлемый объем БЗУ позволяет получить мизерную вероятность потери дефектоскопического сигнала . Скорость контроля в предлагаемой системе ограничена только быстродействием блока управления микропроцессора и сложностью программы обработки. Допустимая скорость контроля может быть найдена из соотношения . . . , где Л fff) - интенсивность суммарного входного потока эх9-импульса как функция от скорости контроля-, Т{.р - среднее время обработки рдного эхо-импульса. Использование предлагаемой системы позволяет вести контроль изделий с большей скоростью и в то же время с высоко-, достоверностью контроля за счет ввода информации о всей пачке эхр-импульсов и совместной обработки этих сигналов, принятых от разных каналов.
Шина
Выдор
20
адреса
I
f
Запись
Шина данных
I
Фиг. J
Ш(/ г
Разрешение
nevoffrn
22
Падт8ерждение приема от
gcmpoucmSa
23
| Залесский В.В | |||
| и др | |||
| Система, цифровой регистрации результатов ультразвуковой дефектоскопии | |||
| Дефектоскопия, 1977, № 3, с | |||
| Плуг с фрезерным барабаном для рыхления пласта | 1922 |
|
SU125A1 |
| Система для автоматической регистрации дефектов | 1980 |
|
SU926593A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
