Известно применение мерной проволоки или специальных механизмов- корректировщиков при квадратно-гнездоБОМ посеве и посадке, с целью получения постоянного заданного расстояния между растениями в рядке и образования прямолинейных рядков в поперечном направлении.
Однако применение мерной проволоки при квадратно-гнездовом посеве и посадке и обработке междурядий и мёждугнездий требует больших затрат ручного труда, а применение корректировщиков не обеспечивает получения точных квадратов вследствие большой утомляемости рабочего.
Предлагаемый автоматический синхронизатор дает возможность устранить указанные недостатки путем применения двух дифференциалов, включаемых последовательно в привод агрегатируемой мащины или орудия с обратной связью на корпус первого дифференциала, который получает движение отвала отбора мощности трактора, а другой - от приводного колеса или гусеницы трактора или самоходного щасси.
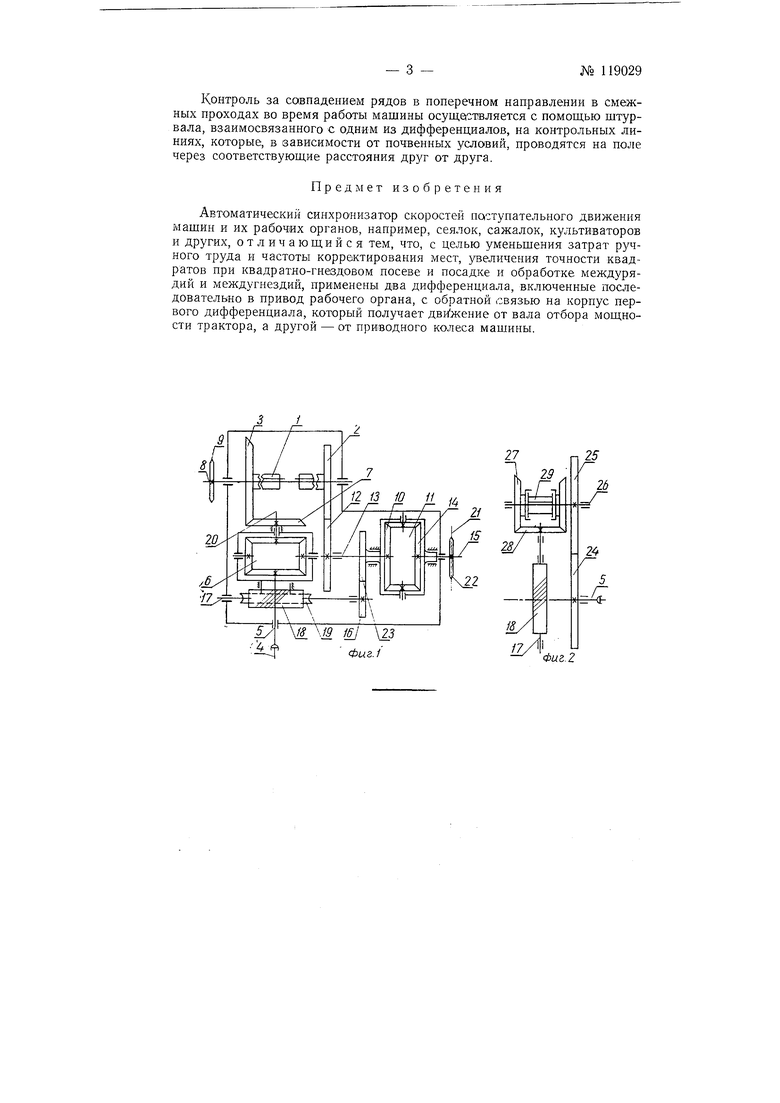
На фиг. 1 изображена кинематическая схема автоматического си«хрОНизатора скоростей; на фиг- 2 - вариант переделки кинематической схемы синхронизатора, позволяющий получить полуавтоматический корректор применительно к высадно-посадочным мащинам.
Для приведения в действие синхронизатора /, вводят в зацепление с ще|Стернями 2 и 3- Кардаиный вал 4, через вал 5, дифференциал 6 и шестерню 7 передает движение валу 8 и далее трансмиссионному валу мащипы посредством звездочки 9 и цепной передачи. Вал 8 передает также движение шестерне 10 дифференциала 11 посредством щестерен 2 и /2 и вала 13. Шестерня 14 этого же дифференциала получает движение от ходового колеса машины. Передаточные отношения от карданного вала 4 к валу 13 и от коле|Са мащины к валу 15 должны быть рассчитаны таким образом, чтобы во время работы агрегата при отсутствии буксования
№ 119029- 2 -
трактора валы 13 и 15 имели одинаковое число оборотов и вращались бы в одну и ту же сторону. При движении агрегата отношение числа оборотов карданного вала трактора, который работает на одном режиме, к скорости д.йижения машины не постоянно, вследствие буксования трактора. В этом случае-переменной величиной является скорость движения машины. Поэтому и нельзя получить заданное расстояние между высаженными растениями при обычных передачах движения от карданного вала трактора к валу рабочего механизма машииы, получающего также постоянное число оборотов.
Для того, чтобы получить заданное расстояние между высаживаемыми растениями, необходимо соблюсти постоянство отношения числа оборотов вала рабочего механизма и скорости движения машины. При переменной скорорти движения машины (вследствие буксования трактора) это зсловие может быть выдержано путем соответствующего изМе-т нения чисел оборотов вала рабочего механизма, что и предполагается осуществить с помощью предлагаемого синхронизатора.
При буксовании трактора или «накатывании машины, последняя бздет проходить переменный путь, Вследствие чего вал 15 (следовательно и шестерня 14) будет получать переменное число оборотов, отличное от числа оборотов шестерни 10. В результате разности угловых скоростей шестерен 10 и 14 коробка дифференциала 11 будет получать вращательное движение, передавая его дифференциалу 6 посредством шестерни 16, вала 17, червячной пары 18 и 19. Число оборотов вала 20 будет отличным от числа оборотов карданного вала трактора на величину ± числа оборотов дифференциала 6, которое, в свою очередь, как показано выше, зависит от величины буксования трактора.
Таким образом, отношение чисел оборотов вала 8 к поступательной скорости движения машины практически будет постоянным, что и является основным фактором, обусловливающим получение заданного постоянного расстояния между растениями.
Па синхронизаторе или мащине может быть предусмотрено устройство, выключающее из работы передачу 21. Компоновка схемы может быть изменена в зависимости от конструктивной целесообразности и удобства использования синхронизатора при работе мащины.
Путем замены в схеме (фиг. 1) элементов 1, 2, 11, 12, 13, 15, 16, 21, 22 и 23 на элементы по схеме (фиг. 2) можно получить полуавтоматический корректор известного типа, но применительно к высадкопосадочной мащине.
Па валу 5 закрепляется цилиндрическая шестерня 24, находящаяся в зацеплении с шестерней 25, закрепленной на валу 26, на котором свободно посажены конические шестерни 27, находящиеся в зацеплении с шестерней 28, закрепленной на валу 17. При нейтральном положении муфты 29 корректор работает как обычный редуктор- Корректировка мест посадки растений (корней) в смежных проходах машины осуществляется следующим образом. При несовпадении поперечных рядков в сменных проходах рабочий включает в работу правую или левую щестерню 27 посредством муфты 29, вследствие чего дифференциал 6 получает вращательное движение от карданного вала трактора, дополняя этим или уменьшая число оборотов трансмиссионного вала машины.
С помощью автоматического синхронизатора скоростей можно обеспечить заданное расстояние между растениями в рядке и прямолинейность рядков в поперечном направлении без участия рабочего в процессе работы машины. Для обеспечения поперечной прямолинейности рядков рабочие органы машины необходимо устанавливать в соответствующее исходное положение на одну и ту же линию для всех проходов.
Контроль за совпадением рядов в поперечном направлении в смежных проходах во время работы машины осу1це|:твляется с помощью штурвала, взаимосвязанного с одним из дифференциалов, на контрольных линиях, которые, в вависимости от почвенных условий, проводятся на поле через соответствуюш,ие расстояния друг от друга.
Предмет изобретения
Автоматический синхронизатор скоростей поступательного движения машин и их рабочих органов, например, сеялок, сажалок, культиваторов и других, отличающийся тем, что, с целью уменьщения затрат ручного труда и частоты корректирования мест, увеличения точности квадратов при квадратно-гнездовом посеве и посадке и обработке междурядий и междугнездий, применены два дифференциала, включенные последовательно в привод рабочего органа, с обратной связью на корпус первого дифференциала, который получает движение от вала отбора мощности трактора, а другой - от приводного колеса машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мерное приспособление к гусеничным тракторам для посева пропашных культур различными способами без мерной проволоки | 1956 |
|
SU119385A1 |
| Импульсная фотоэлектрическая следящая система для квадратного и квадратно-гнездового посева и посадки пропашных культур | 1960 |
|
SU144653A1 |
| КОЛЕСНАЯ МОДИФИКАЦИЯ ГУСЕНИЧНОГО ТРАКТОРА | 2010 |
|
RU2432293C1 |
| КОЛЕСНЫЙ ТРАКТОР | 2004 |
|
RU2303546C2 |
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |
| Трансмиссия транспортного средства | 1986 |
|
SU1632816A1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| ПРИВОД ВАЛА ОТБОРА МОЩНОСТИ ТРАКТОРА С РЕГУЛИРУЕМОЙ ЧАСТОТОЙ ВРАЩЕНИЯ | 1993 |
|
RU2080035C1 |
| Управляемый ведущий мост транспортного средства | 1989 |
|
SU1743968A1 |
| Высадкопосадочная машина | 1957 |
|
SU114441A1 |
