Изобретение относится к устройствам для измерения вязкости жидких сред.
Цепью изобретения является повышение чувствительности и точности измерения вязкости жидкости.
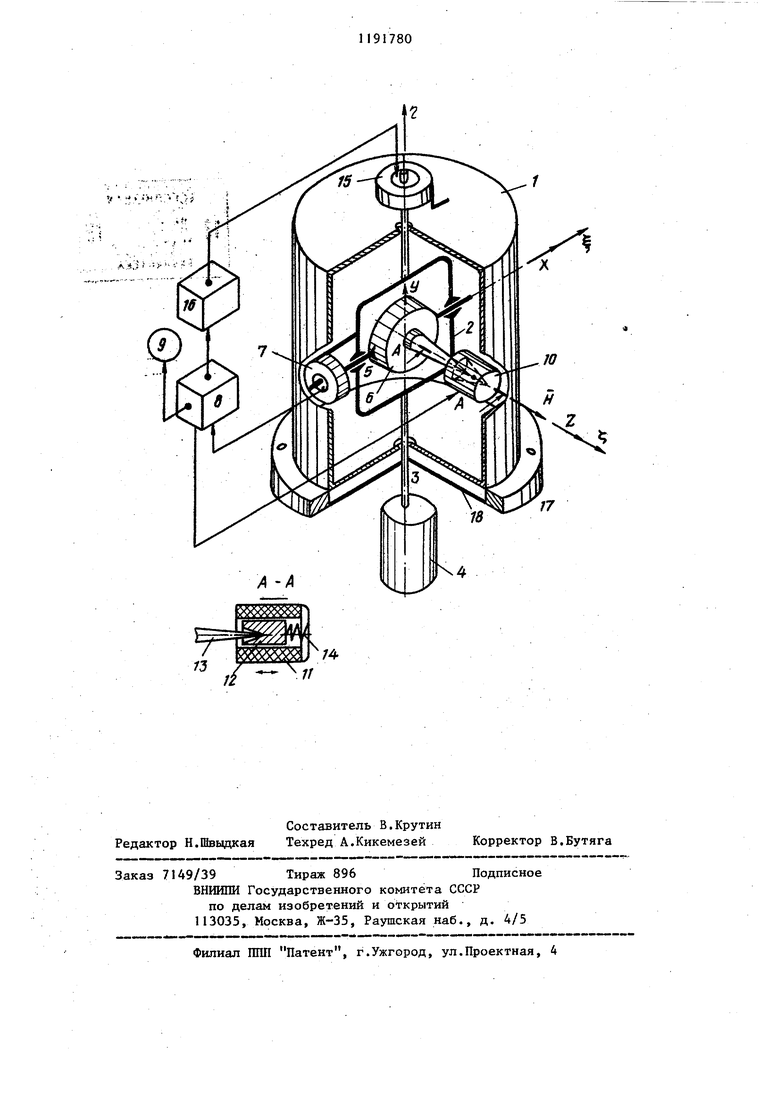
На чертеже представлена кинематическая схема вискозиметра.
Система координат XYZ связана с гиромотором, а система г - с корпусом.
В корпусе 1, вьшолненном в виде полого цилиндра, установлена рамка 2 с помощью оси 3 и подшипников. На конце оси 3 установлен зонд 4, который перемещается в исследуемую жидкость и воспринимает момент сил вязкого трения. Б рамке 2 с помощью оси 5 установлен гиромотор 6, центр тяжести которого находится в точке пересечения осей 3, 5 и 2. На оси 5 установлен датчик 7 угла, преобразующий амплитуду угловых колебаний гироскопа 6 в электрический сигнал и имеюпщй связь через устройство 8 управления с регистрирующим прибором 9, проградуированным в единицах вязкости. Градуировка произво, дится при тарировке прибора. Выход устройства 8 управления связанс арретиром 10, предназначенным для установки гироскопа в исходное положение .перед измерением вязкости. Арретир 10 представляет собой катушку 11 внутри которой установлен сердеч- ник 12 с гнездом для носика 13 гиромотора 6. В исходном (арретированном положении сердечник удерживается цилиндрической пружиной 14. При подаче напряжения питания на катушку 11 сер дечник 12 втягивается внутрь, сжимая пружину 14, и освобождает носик 13
гироскопа 6. I
На втором конце оси 3 установлен датчик 15 моментов, имеющий электри- ческую связь с задающим генератором 16 минусоидальных колебаний. Задающий генератор 16 имеет электрическую связь с устройством 8 управления и предназначен для подачи сину соидального сигнала определенной амплитуды и частоты. Для повьш1ения чувствительности вискозиметра частота сигнала равна собственной частоте недемпфированных колебаний гироскопа В нижней части корпуса 1 укреплено кольцо 17 с уплотняющей прокладкой 18. С помощью кольца 17 корпус 1
устанавливается таким образом, чтобы зонд 4 помещался в исследуемую жидкость.
Вискозиметр работает следующим образом.
Зонд 4 помещается в исследуемую жидкость. Подается питание на гиромотор гироскопа 6, задающий генератор 16, датчик 7 угла и датчик 15 моментов. Ротор гиромотора гироскопа 6 разгоняется до номинального числа оборотов. С устройства 8 управления подаются сигналы на арретир 10 и на задающий генератор 16. Под действием этих сигналов сердечник 12 арретира 10 вытягивается в катушку и освобождает носик гироскопа 6, а задающий генера тор 16 подает синусоидальное напряжение строго определенной амплитуды и частоты, равной частоте недемпфированных колебаний гироскопа, на датчик 15 моментов . Датчик 15 моментов прикладьшает момент по оси 3, изменяющийся по закону
M(t) а. sincot (I)
где а„- амплитуда момента;
СО - круговая частота изменения момента.
Под действием этого момента гироскоп 6 совершает вынужденные колебания вокруг оси 5 с амплитудой, зависящей от вязкости жидкости. Амплитуда вынужденных колебаний вокруг оси 5 измеряется датчиком 7 угла, преобразуется в электрический сигнал, который через устройство 8 управления подается на регистрирующий прибор 9,проградуированный в единицах вязкости. Если вискозиметр используется для измерения вязкости при непрерывном технологическом процессе, то через определенные промежутки времени устройство управления снимает питание с арретира для контроля и установки гироскопа в исходное положение.
Движение гироскопа при действии момента, изменяющегося по закону СО, описывается системой дифференциальных уравнений
В «; + /иы - H/i а sincot; (2) А + Hoi О,
где В,А - моменты инерции гироскопа относительно осей 3 и 5 соответственно; 3 /у - удельный момент сил вязкости трения, обусловлен:1ый движением зонда 4 в исследуемой жидкости; oL,j - углы, характеризующие пов рот гироскопа вокруг осей 3 и 5 соответственно; Н - кинетический момент гироскопа. Вынужденные 1(олебания гироскопа вокруг оси 5 характеризуются амплитудой вьмужденных колебаний, определяемой выражением (W) а„ (Ы) . (3) Mg (w) 12 УИ -/ , амплитудно-частотная характеристика гироско па. Амплитудно-частотная характеристика АЯ (Q) определяется из передаточной функции гироскопа /(rtJi.ri, V V) Авр(р%гр,„;)(, ГГ9 частота собственных s недемпфированных колебаний гироскопа(при /U о). Из передаточной функции (4) находимАИ г л|AV/U AвЧco CJ)(0 80 UH ИЗ выражения (5) получаем При СО и) --.-5ВТ уйЯ с учетом равенства (б) амплитуда вынужденных колебаний гироскопа из выражения (З) при CJ сО определяется выражением / а В / -HjJ--Из равенства (7) находим д,к / а («„ где - масштабный коэффициент, определяемый параметрами конкретного вискозиметра. Из вьфажения (7) следует, что амплитуда вынужденных колебаний гироскопа вокруг оси 5 обратно пропорциональна коэффициенту удельного момента сил вязкого трения, а следовательно, и вязкости жидкосги. Измеряя амплитуду вынужденных колебаний ая (ы„)датчиком 7 угла и преобразуя ее в электрический сигнал, можно определить в соответствии с выражением (8) коэффициент удельного момента сил вязкого трения. Сигнал с датчика 7 угла подается на регистрирующий прибор 9, проградуированный в единицах вязкости при тарировке вискозиметра.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| Устройство для измерения вязкости жидкости | 1978 |
|
SU771515A1 |
| Вискозиметр | 1982 |
|
SU1030700A1 |
| Устройство для ориентации сейсмоприемников в скважинах | 1982 |
|
SU1124236A1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| Устройство для измерения вязкости жидкости | 1980 |
|
SU898293A1 |
| Устройство для измерения вязкости жидкости | 1977 |
|
SU735968A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ С УСКОРЕНИЕМ АППАРАТА С ПОМОЩЬЮ ГИРОВЕРТИКАЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2138017C1 |
| Вибрационный вискозиметр | 1987 |
|
SU1413486A1 |
| СПОСОБ ПРОВЕРКИ РАБОТОСПОСОБНОСТИ ТРЕХСТЕПЕННОГО ГИРОСКОПА С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1994 |
|
RU2117917C1 |
ВИСКОЗИМЕТР, содержащий корпус, размещенный в нем трехстепенной уравновешенный гироскоп, датчик угла, установленный на оси внутренней рамки гироскопа, и регистрирующий прибор, отличающийся тем, что, с целью повышения точности измерения вязкости за счет использования динамических свойств уравновешенного трехстепенного гироскопа на частоте собственных недемпфированных колебаний, гиромотор гироскопа установлен в рамке, продольная ось которой герметично выведена из корпуса и снабжена зондом, расположенным на конце продольной оси, на другом конце которой установлена возбуждающая система, соединенная с задающим генератором синусоидальных колебаний, датчик угла связан через устройство управления с регистрирующим прибором, причем один (А выход устройства управления соединен с задающим генератором, а другой С в с арретиром. t со 00
| Белкин И.М | |||
| и др | |||
| Ротационные приборы | |||
| М,: Машиностроение, 1968, с | |||
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
| Устройство для измерения вязкости жидкости | 1977 |
|
SU735968A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения вязкости жидкости | 1978 |
|
SU771515A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
