Изобретение относится к области гироскопических приборов, предназначенных для определения истинной вертикали на движущихся или неподвижных объектах и применяющихся, например, в качестве датчиков крена и тангажа летательных аппаратов.
Такие приборы получили название гировертикалей и нашли широкое применение в системах управления подвижными объектами.
Известен способ измерения углов с помощью гиромаятника [Пельпор Д.С. Гироскопические системы, ч. 11. Гироскопические приборы и системы. М., 1971, рис. 3.3, стр. 122], который заключается в создании кинетического момента гироскопа (запуске гиромотора), приведении вектора кинетического момента к вертикали смещенным центром тяжести карданова подвеса и получении информации с датчиков угла по осям карданова подвеса. Недостатком данного способа является невысокая точность измерения углов поворота подвижного объекта даже при небольших ускорениях его движения из-за невозможности отсоединения маятниковости и большое время приведения вектора кинетического момента к вертикали.
Известна конструкция гиромаятника [Пельпор Д.С. Гироскопические системы, ч.11. Гироскопические приборы и системы. М., 1971, рис. 3.3, стр. 122], которая реализует данный способ. Гиромаятник представляет собой трехстепенной гироскоп, у которого центр масс смещен вдоль оси собственного вращения в отрицательном направлении. При отклонении оси собственного вращения гиромаятника от вертикали на него действует момент от силы тяжести, вызванный смещенным центром масс, и ось собственного вращения гиромаятника приходит к истинной вертикали. Недостатком данной конструкции является большое время прихода гиромаятника к вертикали, и значительное влияние на точность измерения углов поворота подвижного объекта оказывает его ускоренное движение.
Известен также способ измерения углов поворота движущегося объекта с помощью силовой двухгироскопной гировертикали [Пельпор Д.С. Гироскопические системы, ч. 11. Гироскопические приборы и системы. М., 1971, рис. 3.38, стр. 197-199], который наиболее близкий по решаемой технической задаче и является прототипом предложенного технического решения. Данный способ заключается в запуске гиромоторов, приведении гироскопической системы к вертикали с помощью моментных датчиков, получающих сигналы от жидкостных маятниковых чувствительных элементов, отключении моментных датчиков при движении аппарата с ускорением и получении информации об угловом положении аппарата с датчиков угла гировертикали. Недостатком данного способа является большое время приведения гироскопической системы к вертикали из-за медленной прецессии гироскопов с платформой, низкая надежность маятниковых жидкостных переключателей при вибрационных и ударных воздействиях и сложность системы силовой стабилизации.
Известна конструкция силовой гировертикали, которая по технической сути является наиболее близким аналогом (прототипом) [Пельпор Д.С. Гироскопические системы, ч. 11. Гироскопические приборы и системы. М., 1971, рис. 3.38, стр. 197-199] . Гировертикаль содержит корпус, наружную и внутреннюю рамы карданова подвеса гировертикали. На внутренней раме (платформе) размещены два двухстепенных гироскопа, у которых векторы кинетических моментов направлены встречно по вертикали. Гироскопы установлены на платформе рядом друг с другом в направлении оси наружной рамы гировертикали и их оси подвеса кожухов гиромоторов размещены горизонтально и ортогонально друг к другу, а по осям установлены датчики моментов и датчики углов прецессии гироскопов. На платформе также размещены ортогонально друг к другу маятниковые чувствительные элементы, каждый из которых управляет моментным датчиком одного из гироскопов и, соответственно, коррекцией платформы по осям подвеса гировертикали. По осям подвеса гировертикали установлены датчики углов, характеризующие отклонение от вертикали объекта, на котором установлен гироскоп и разгружающие внешние моменты двигатели, которые управляются посредством датчиков углов прецессии гироскопов. Недостатком данной конструкции является большое время приведения гироскопической системы к вертикали из-за медленной прецессии гироскопов с платформой, низкая надежность маятниковых жидкостных переключателей при вибрационных и ударных воздействиях, сложность конструкции и электромонтажа из-за наличия моментных датчиков и разгрузочных двигателей, жидкостных маятниковых чувствительных элементов и датчиков углов прецессии по осям подвеса кожуха гироскопа.
Задачей данного изобретения является уменьшение времени приведения гироскопического прибора к вертикали при упрощении конструкции, уменьшении габаритов и повышение точности и надежности измерений углового положения движущегося с ускорением объекта.
Поставленная задача изобретения в части способа достигается тем, что в известный способ измерения углов поворота движущегося с ускорением аппарата с помощью гировертикали, заключающийся в запуске гиромоторов, приведении гироскопической системы к вертикали, отсоединении маятниковости перед началом движения аппарата с ускорением и получении информации об угловом положении аппарата с датчиков гировертикали, дополнительно вводят следующие операции: вперед приведением гироскопической системы к вертикали накладывают ограничения на степени свободы гироскопической системы; обнуляют кинетический момент гироскопической системы и одновременно к карданову подвесу подсоединяют физический маятник; гироскопическую систему, ограниченную по степеням свободы и с нулевым кинетическим моментом, приводят посредством физического маятника к вертикали на участке траектории без ускорений; вперед началом движения аппарата с ускорением снимают ограничения на степени свободы гироскопической системы, восстанавливают ее кинетический момент и одновременно отсоединяют маятниковость.
Поставленная задача изобретения в части устройства достигается тем, что в устройство для осуществления способа измерения углов поворота движущегося с ускорением аппарата с помощью гидровертикали, содержащем корпус, наружную и внутреннюю рамы карданова подвеса, размещенные на внутренней раме два гироскопа, у которых векторы кинетических моментов направлены встречно по вертикали, оси их кардановых подвесов расположены ортогонально друг другу, а по осям корданова подвеса установлены датчики углов, введены следующие конструктивные признаки: внутренняя рама выполнена в виде полого цилиндра с вертикальной осью; внутри цилиндра установлены друг над другом два трехстепенных гироскопа, кожухи которых соединены шарниром; на верхнем торце цилиндра размещена крышка с жестко размещенным по его оси якорем соленоидного электромагнита постоянного тока; корпус электромагнита подпружинен относительно крышки, имеет возможность перемещения в сторону кожуха гироскопа и своей чашеобразной втулкой подведен с зазором к арретирующему шарику на кожухе; на нижнем торце цилиндра установлен соосно с ним колпак в виде сферической оболочки с центром, совпадающим с центром подвеса устройства; на корпус под сферическим колпаком установлен второй электромагнит переменного тока, якорь которого подключен к сферической оболочке с возможностью ее касания по оси цилиндра при включении электромагнита.
Предлагаемый способ измерения углов поворота движущегося с ускорением аппарата с помощью гидровертикали обеспечивает, с одной стороны, быстрое приведение системы измерений к истинной вертикали посредством физического маятника, колебания которого демпфируются электромагнитом переменного тока. Приведение к вертикали производится на участке траектории движения аппарата с небольшим ускорением при его отсутствии. С другой стороны, измерение углов поворота движущегося с ускорением аппарата производится сбалансированной гироскопической системой, состоящей из двух сбалансированных гироскопов, которые соединены шарниром и которые компенсируют погрешности измерений при колебаниях аппарата и на его вираже.
Общий вид устройства для осуществления способа измерения углов поворота движущегося с ускорением аппарата с помощью гировертикали показан на чертеже.
В корпусе 1 на подшипниковых опорах 2 и 3 установлены наружная рама 4 и внутренняя рама 5 устройства. Наружная рама 4 выполнена в виде кольца, а внутренняя рама 5 выполнена в виде полого цилиндра. По осям вращения рам размещены одинаковые оптронные датчики 6, состоящие из светодиода 7, фотодиода 8 и закрепленного на оси вращения рамы флажка 9, который обеспечивает или аналогичный сигнал за счет его переменной ширины, или цифровой при его щелевидной форме.
Во внутренней полости цилиндра 5 на оси Z установлены два трехстепенных гироскопа с кинетическими моментами H1 и H2, которые направлены в разные стороны. Оси наружных рамок 10 и 11 гироскопов установлены горизонтально и ортогонально друг другу в подшипниковых опорах 12 и 13 цилиндра 5. Кожух 14 нижнего гироскопа выполнен с выступом шариком 15, который введен в полую втулку, размещенную на кожухе 17 верхнего гироскопа, обеспечивая шарнирное соединение.
На верхнем торце цилиндра 5 установлен колпак 18, на котором закреплен жестко по оси Z якорь 19 электромагнита соленоидного типа, корпус 20 которого имеет выступ в виде чашеобразной втулки 27 и подпружинен плоскими пружинами 21 и имеет возможность перемещения вниз к кожуху верхнего гироскопа, на котором размещен арретирующий шарик 22. Между кромкой чашеобразной втулки корпуса 20 электромагнита и арретирующим шариком выполнен зазор δ1.
На нижнем торце цилиндра 5 установлен колпак 23 в виде сферической оболочки с радиусом в точке пересечения осей X, Y, Z. К колпаку 23 с зазором δ2 подведен якорь 24 электромагнита переменного тока 25, закрепленного жестко на корпусе 1. Якорь поджат пружиной 26 и способен перемещаться до касания с колпаком 23.
На фиг. показано, что устройство для осуществления способа измерения углов поворота движущегося с ускорением аппарата с помощью гировертикали сбалансировано, его центр массы совпадает с датчиком пересечения осей X, Y, Z. Также сбалансированы каждый из двух гироскопов относительно собственных осей вращения. Электромонтаж гировертикали, включающий подвод напряжения для вращения гиромоторов, для запитки и съема показаний с датчиков углов и подвод напряжения к электромагнитам на чертеже не показан. Электромонтаж осуществляется обычным известным в гироскопии способом.
Работа устройства для измерения углов поворота движущегося с ускорением аппарата с помощью гировертикали происходит следующим образом. Разгон гиромоторов осуществляется переменным напряжением высокой частоты (400, 500 или 1000 Гц). После разгона гиромоторов гироскопы приобретают главные моменты количества движения (кинетические моменты H1 и H2) и гироскопическая система приобретает свойства сохранять свое положение неизменным. (Режим свободной гировертикали).
Для коррекции гироскопической системы по вертикали подается постоянное напряжение на верхний электромагнит, корпус 20 которого, преодолевая усилие пружины 21, перемещается вниз и фиксирует посредством чашеобразной втулки 27 кожух верхнего гироскопа. За счет шарнирной связи также фиксируется относительно цилиндра 5 и кожух нижнего гироскопа. При этом оба гироскопа лишаются своих степеней свободы за исключением вращения роторов и при равенстве их кинетических моментов H1 и H2 их суммарное значение будет равно нулю из-за направления векторов в разные стороны. Таким образом, в этом случае цилиндр 5 с установленными в нем элементами превращается в негироскопическое тело и с учетом перемещения корпуса 20 верхнего электромагнита вниз, смещающим центр масс ниже точки подвеса, становится физическим маятником с подвесом по осям X, Y рам устройства. Физический маятник быстро приходит к вертикали (за 1...5 с). Гармонические колебания маятника успокаиваются с помощью электромагнита переменного тока 25, якорь 24 которого периодически касается колпака 23 с частотой 1...10 Гц. (Режим физического маятника).
Коррекция системы в режиме физического маятника должна проводиться при небольших ускорениях движущегося объекта для исключения значительных ошибок приведения физического маятника к истинной вертикали. Данный режим должен быть завершен до начала движения аппарата с ускорением, при котором информация об его угловом положении, снимаемая с датчиков угла, используется в системе управления аппаратом.
Таким образом, предложенный способ измерения углов поворота движущегося с ускорением аппарата с помощью гировертикали и устройство для его осуществления позволяют иметь два режима работы гировертикали: режим физического маятника для быстрого приведения системы измерений к вертикали и режим свободной гировертикали для измерения углов поворота аппарата при его движении с ускорением (на вираже).
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОПИЧЕСКИЙ ПРИБОР С ПРУЖИННЫМ ГИРОМОТОРОМ СОВМЕЩЕННОГО ТИПА В НАРУЖНОМ КАРДАНОВОМ ПОДВЕСЕ | 2001 |
|
RU2189011C1 |
| СПОСОБ ЗАПУСКА ГИРОСКОПИЧЕСКОГО ПРИБОРА С ПРУЖИННЫМ ГИРОМОТОРОМ СОВМЕЩЕННОГО ТИПА В НАРУЖНОМ КАРДАНОВОМ ПОДВЕСЕ | 2001 |
|
RU2189013C1 |
| Гироскопический маятник | 2019 |
|
RU2719241C1 |
| СПОСОБ ВЗВЕДЕНИЯ ПРУЖИНЫ ГИРОМОТОРА | 2001 |
|
RU2189012C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2019 |
|
RU2716599C1 |
| Гироскопический маятник | 2020 |
|
RU2747913C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2020 |
|
RU2748143C1 |
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
| УСТРОЙСТВО КОРРЕКЦИИ ГИРОВЕРТИКАЛИ | 1998 |
|
RU2145057C1 |
Способ и устройство предназначены для определения истинной вертикали на движущихся или неподвижных объектах. Устройство предназначено для использования в качестве датчиков крена и тангажа летательных аппаратов. Накладывают ограничения на степени свободы гироскопической системы. Обнуляют ее кинетический момент. Одновременно подсоединяют физический маятник к карданову подвесу. Гироскопическую систему приводят посредством физического маятника к вертикали на участке траектории без ускорений. Перед началом движения аппарата с ускорением снимают ограничения на степени свободы гироскопической системы. Восстанавливают ее кинетический момент и одновременно отсоединяют маятниковость. Получают информацию об угловом положении аппарата с датчиков угла. Внутренняя рама выполнена в виде полого цилиндра с вертикальной осью. Внутри цилиндра установлены друг над другом два трехстепенных гироскопа, у которых векторы кинетических моментов направлены встречно по вертикали. Оси кардановых подвесов расположены ортогонально друг к другу. Кожухи гироскопов соединены шарниром. На верхнем торце цилиндра размещен якорь соленоидного электромагнита, корпус которого имеет возможность перемещения в сторону кожуха гироскопа. На нижнем торце цилиндра установлен соосно с ним колпак в виде сферической оболочки с центром, совпадающим с центром подвеса устройства. На корпусе под сферическим колпаком установлен второй электромагнит. Обеспечивается уменьшение времени приведения к вертикали, повышение точности и надежности измерений, уменьшение габаритов. 2 с. п. ф-лы, 1 ил.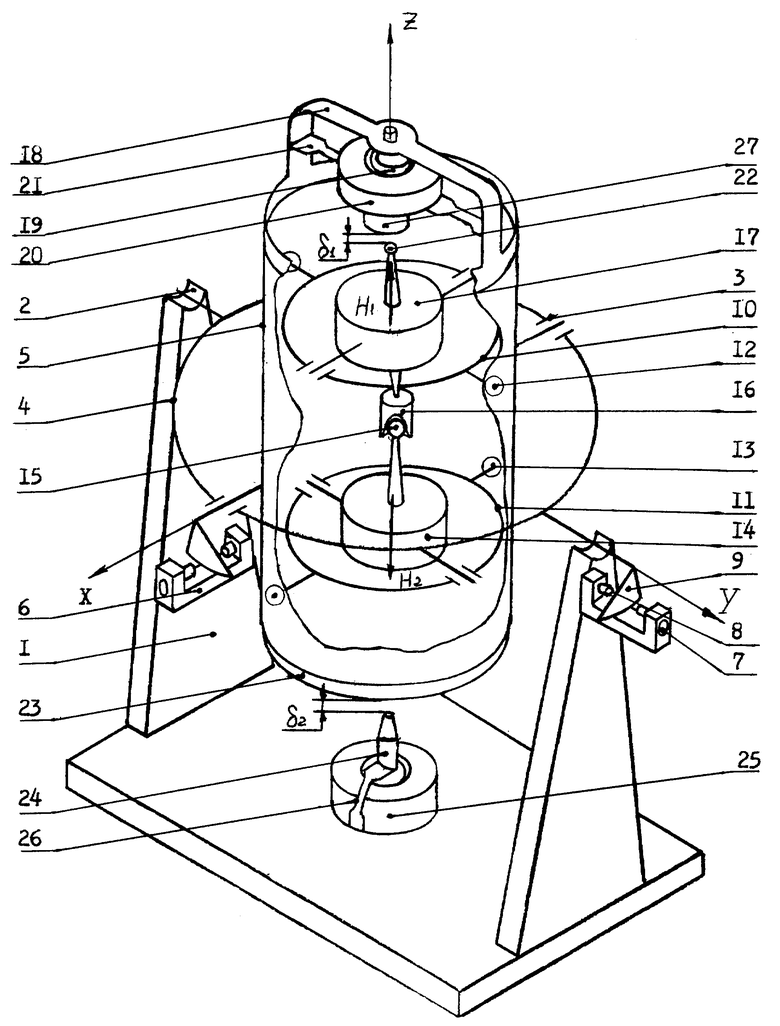
| Пельпор Д.С | |||
| Гироскопические системы, ч.II | |||
| - М.: Высшая школа, 1971, с.197 - 199 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВЫХ СКОРОСТЕЙ ПОДВИЖНОГО ОБЪЕКТА С ПОМОЩЬЮ ТРЕХСТЕПЕННОГО ГИРОСКОПА С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1993 |
|
RU2111455C1 |
| RU 94028536 A1, 27.04.97 | |||
| EP 0258085 A2, 02.03.88 | |||
| Устройство для удаления обломка электрода из электросталеплавильной печи | 1991 |
|
SU1803702A1 |
