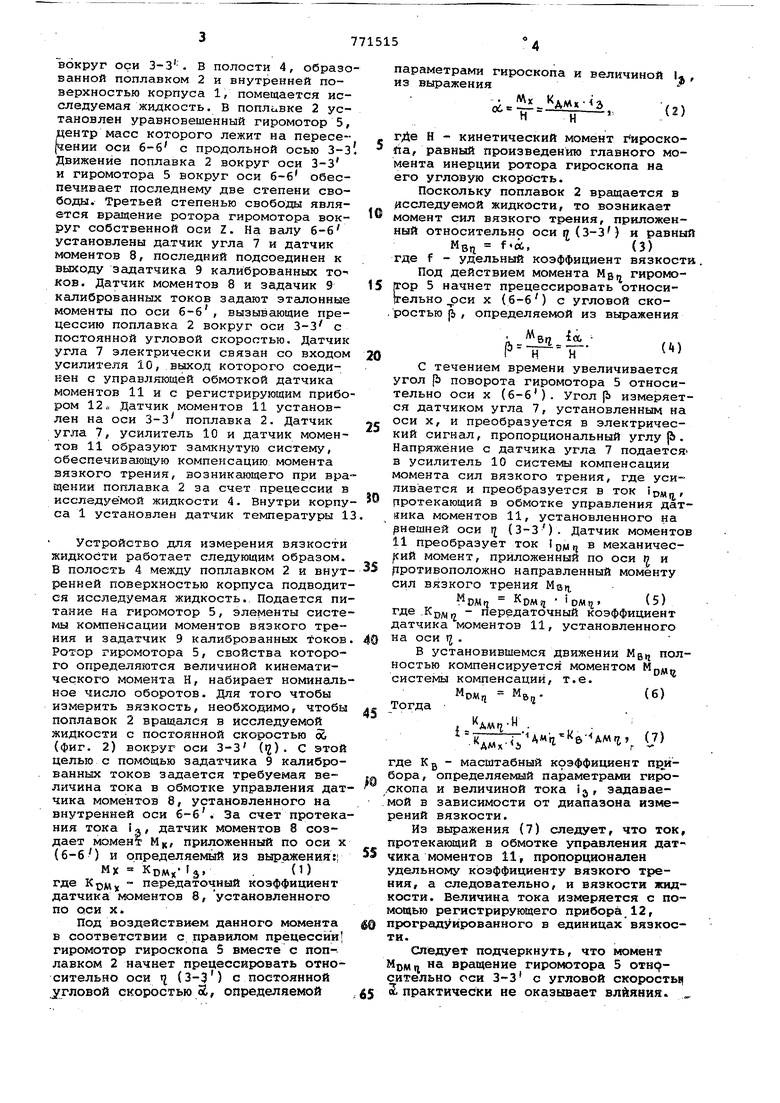
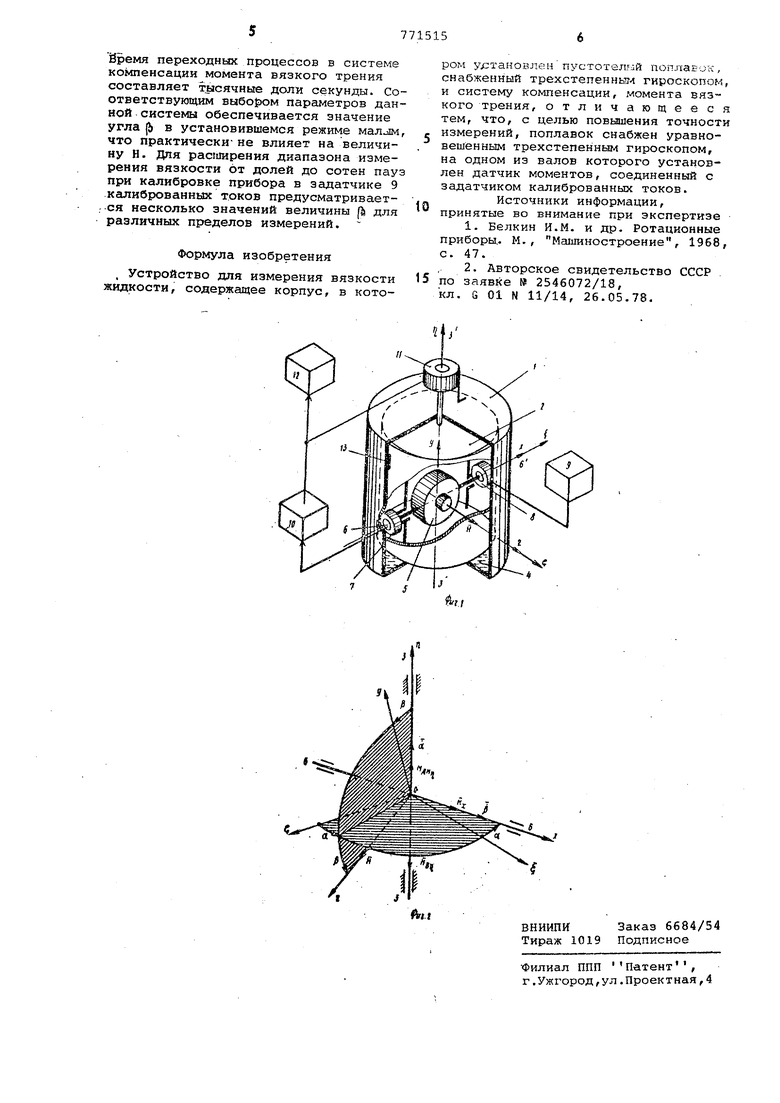
Изобретение относится к устройствам для исследования физических свойств веществ, а также вязкости жидкости. Известен ротационный вискозиметр l1 , в котором исследуемая жидкость помещается в заэор между двумя соосными телами, одно из которых вращается, а другое неподвижно. Вязкость определяется по крутящему моменту при заданной угловой скорости или по угловой скорости вращающегося тела при заданном крутящем моменте. Устройство не обеспечивает достаточной достоверности измерений из-за разрушения структуры исследуемой среды. Наиболее близким к изобретению является устройство для измерения вязкости 23 . Устройство состоит из трехстепенного неуравновешенного гироскопа, помещенного в поплавковую камеру, и системы, обеспечивающей компенсацию момента вязкого трения путем поддержания перпендикулярности главной оси гироскопа продольной оси при вра щательном движении поплавка с гиромотором в исследуемой жидкости. Движение поплавка в исследуемой жидкос ти с постоянной скоростью обеспечивается за счет Момента, создаваемого силой тяжести. Недостаток устройства состоит в зависимости его масштабного коэффициента от величины угла, характеризующего неточность установки продольной оси устройства в вертикальное положение. Цель изобретения - повышение точности измерения вязкости жидкости. Эта цель достигается за счет применения трехстепенного уравновешенного гироскопа в поплавковой камере и введения дополнительной системы, задакяцей эталонные моменты, в виде датчика моментов, установленного на оси внутренней рамки и соединенного с задатчиком калиброванных токов в обмотке управления датчика моментов. На фиг. 1 представлена кинематическая схема устройства для измерения вязкости жидкости; на фиг. 2 - системы координат, связанные с корпусом (ОЦТ) и с уравновешенным гироскопом (oxyz), установленным в кар4|ановом подвесе в виде поплавка. В корпусе 1, выполненном в виде полого цилиндра, с помощью цапфи ;подшипников помещен поплавок 2, который имеет возможность вращаться вокруг оси З-З. В полости 4, образо ванной поплавком 2 и внутренней поверхностью корпуса 1, помещается исследуемая жидкость. В поплавке 2 установлен уравновешенный гиромотор 5, иентр масс которого лежит на пересе(чении оси 6-6 с продольной осью 3-3 Движение поплавка 2 вокруг оси 3-3 и гиромотора 5 вокруг оси б-б обеспечивает последнему две степени свободы. Третьей степенью свободы является вращение ротора гиромотора вокруг собственной оси Z. На валу 6-6 установлены датчик угла 7 и датчик моментов 8, последний подсоединен к выходу эадатчика 9 калиброванньлх токов. Датчик моментов 8 и задачик 9 калиброванных токов задают эталонные моменты по оси б-б, вызывающие прецессию поплавка 2 вокруг оси 3-3 с постоянной угловой скоростью. Датчик угла 7 электрически связан со входом усилителя 10, выход которого соединен с управляющей обмоткой датчика моментов 11 и с регистрирующим прибо ром 12 о Датчик моментов 11 установлен на оси З-з поплавка 2. Датчик угла 1, усилитель 10 и датчик моментов 11 образуют замкнутую систему, обеспечивающую компенсацию момента вязкого трения, возникающего при вра щении поплавка 2 за счет прецессии в исследуемой жидкости 4. Внутри корпу са 1 установлен датчик температуры 1 Устройство для измерения вязкости жидкости работает следующим образом. В полость 4 между поплавком 2 и внут ренней поверхностью корпуса подводит ся исследуемая жидкость.. Подается пи тание на гиромотор 5, элементы систе мы компенсации моментов вязкого трения и задатчик 9 калиброванных токов Ротор гиромотора 5, свойства которого определяются величиной кинематического момента Н, набирает номиналь ное число оборотов. Для того чтобы измерить вязкость, необходимо, чтобы поплавок 2 вращался в исследуемой жидкости с постоянной скоростью ОС (фиг. 2) вокруг оси 3-3 (12). С этой целью с помбщью задатчика 9 калиброванных токов задается требуемая величина тока в обмотке управления дат чика моментов 8, установленного на внутренней оси 6-б. За счет протека ния тока датчик моментов 8 создает момент MI{, приложенный по оси х {б-б) и определяемый из выражения: MX - Комх s где К РИД - передаточный коэффициент датчика моментов 8, установленного по оси X. Под воздействием данного момента в соответствии с правилом прецессии гиромотор гироскопа 5 вместе с поплавком 2 начнет прецессировать относительно оси т (З-З) с постоянной гловой скоростью S, определяемой параметрами гироскопа и величиной I-, из выражения tJ, AM«-J3 Н н гДе Н - кинетический момент гироскопа, равный произведению главного момента инерции ротора гироскопа на его угловую скорость. Поскольку поплавок 2 вращается в 1сследуемой жидкости, то возникает момент сил вязкого трения, приложенный относительно оси i7 (З-З) и равный MB ,,(3) где f - удельный коэффициент вязкости, Под действием момента Mg гиромо(гор 5 начнет прецессировать относи|гельно си X (б-б) с угловой скоростью (Ь , определяемой из выражения .4- с течением времени увеличивается угол (Ь поворота гиромотора 5 относительно оси X (б-б). Угол (Ь измеряется датчиком угла 7, установленным на оси X, и преобразуется в электрический сигнал, пропорциональный углу р. Напряжение с датчика угла 7 подается в усилитель 10 системы компенсации момента сил вязкого трения, где усиливается и преобразуется в ток ipMn ртротекающий в обмотке управления датаика моментов 11, установленного на рнешней оси 1 (3-3). Датчик моментов 11 преобразует ток {цу в механичес сий момент, приложенный по оси п и р:ротивоположно направленный моменту сил вязкого трения Мцц DMij DMij - передаточный коэффициент датчика моментов 11, установленного на оси . В установившемся движении Mgij полностью компенсируется моментом Мр)д„ системы компенсаций, т.е. 1. . ;к ;;-| -Ч«Г б- Ам.1, где Кц - масштабный К9эффициент П15Ибора, определяемый параметрами гироскопа и величиной тока ij , задаваемой в зависимости от диапазона измерений вязкости. Из выражения (7) следует, что ток, протекающий в обмотке управления датчика моментов 11, пропорционален удельному коэффициенту вязкого трения, а следовательно, и вязкости жидкости. Величина тока измеряется с помощью регистрирующего прибора 12, проградз ированного в единицах вязкости. Следует подчеркнуть, что момент DMn на вращение гиро1«}тора 5 отнрсительно оси 3-3 с угловой скорость практически не оказывает влияния. 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения вязкости жидкости | 1977 |
|
SU735968A1 |
| Вискозиметр | 1982 |
|
SU1030700A1 |
| Устройство для измерения вязкости жидкости | 1980 |
|
SU898293A1 |
| ПРЕЦИЗИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2417352C1 |
| Вискозиметр | 1983 |
|
SU1191780A1 |
| СПОСОБ НАСТРОЙКИ БЛОКА ДАТЧИКОВ УГЛОВОЙ СКОРОСТИ С ДИСКРЕТНЫМ ВЫХОДОМ, СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДРЕЙФА ДАТЧИКА УГЛОВОЙ СКОРОСТИ, СПОСОБ ОПРЕДЕЛЕНИЯ ПОКАЗАТЕЛЯ КОЛЕБАТЕЛЬНОСТИ И ПОЛОСЫ ПРОПУСКАНИЯ ДАТЧИКА УГЛОВОЙ СКОРОСТИ, СПОСОБ ОПРЕДЕЛЕНИЯ МАСШТАБНОГО КОЭФФИЦИЕНТА ДАТЧИКА УГЛОВОЙ СКОРОСТИ И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ЮСТИРОВКИ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269747C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2019 |
|
RU2716599C1 |
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 1995 |
|
RU2116623C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОП | 2011 |
|
RU2462761C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
