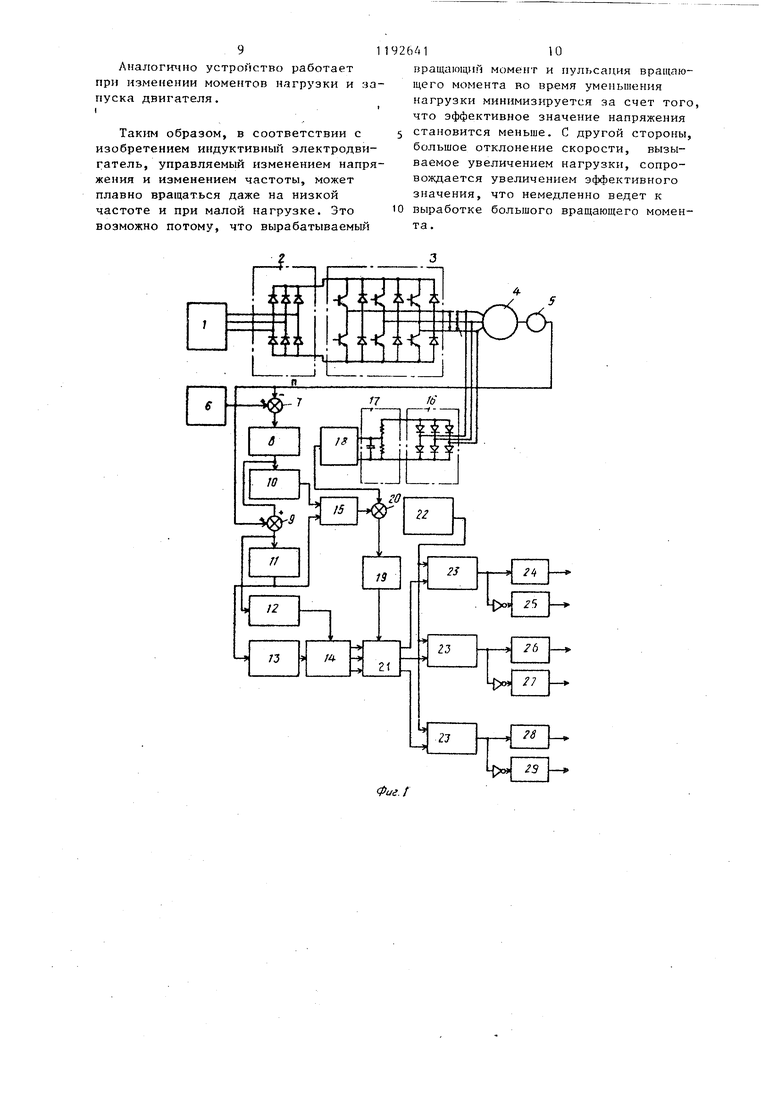
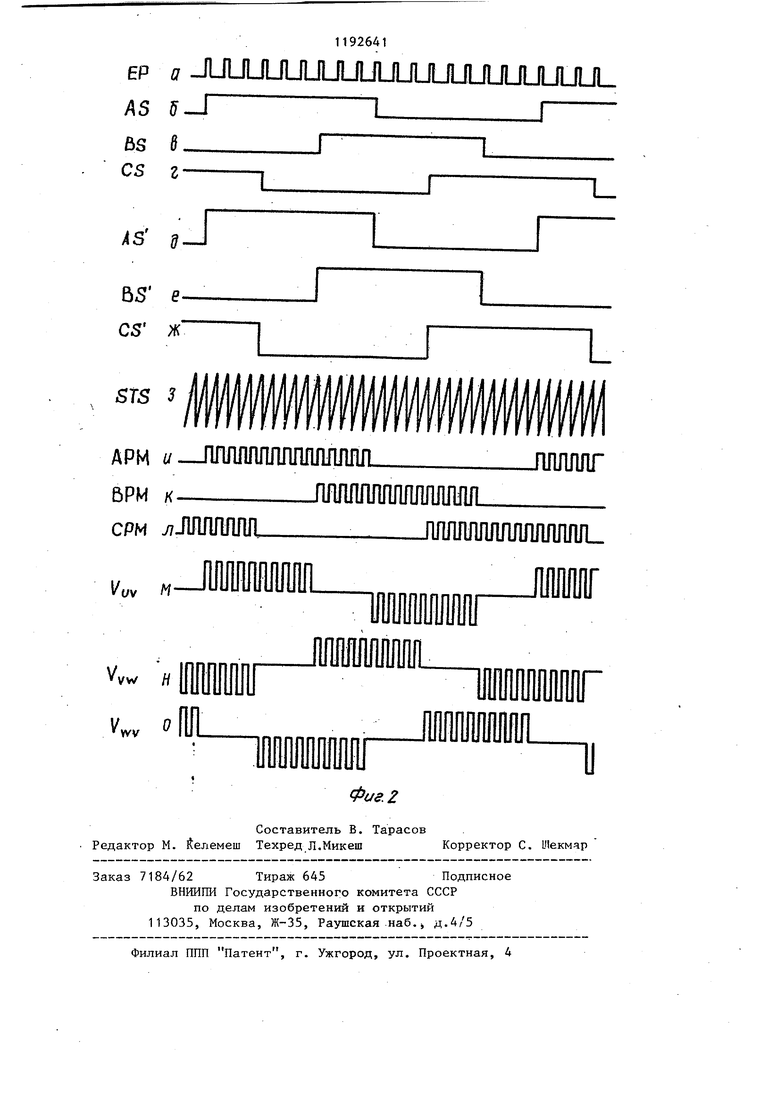
Изобретение относится к электротехнике, а точнее к частотно-регулируемому асинхронному электроприводу, и может найти применение в механизмах с большим диапазоном регулирования скорости. Известно устройство для управлени асинхронным двигателем, содержащее усилитель мощности, выходы которого предназначены для подключения к дви гателю, датчик частоты вращения, выход которого через преобразова тель частота - напряжение соединен с блоком с:,Т4Мирования, второй вход которо го подключен к задатчику абсолютного скольжения, выход через задающий генератор частоты соединен с управляю щим входом усилителя мощности ij . Известное устройство обеспечивает широкий диапазон регулирования часто ты вращения, но не обеспечивает высокой равномерности вращения в облас ти низких частот вращения. Наиболее близким к изобретению является устройство для управления асинхронным двигателем, содержащее инвертор напряжения, предназраченный для подключения к асинхронному двигателю, измеритель фактической скорости вращения двигателя, выход которого подключен к первому входу блока сравнения, второй вход которого подключен к блоку задания скорости, а выход блока сравнения через нелинейный блок подсоединен к блоку суммирования, второй вход которого соединен с измерителем фактической скорости вращения двигателя, блок регулирования напряжения и частоты, содержащий датчик тока, задатчик и блок сравнения 2 . Однако и данное устройство не обеспечивает высокой равномерности вращения, так как форма волны напря жения переменного тока на выходе инвертора не является точно синусоидальной. Цель изобретения - повьппение рав номерртости частоты вращения во всем диапазйне изменения момента нагрузкиПоставленная цель достигается тем, что в устройстве для управлени асинхронным двигателем, содержащем инвертор напряжения, к выходу котор го подключен асинхронный двигатель, измеритель реальной скорости вращен двигателя, выход которого подключен к первому входу первого блока сравнения, второй вход которого подключен к блоку задания скорости, а выход блока сравнения через нелинейный блок подсоединен к блоку суммирования, второй вход которого соединен с измерителем фактической скорости вращения двигателя, блок регулирования напряжения и частоты, связанный с инвертором, и второй блок сравнения, блок регулирования напряжения и частоты составлен из двух блоков формирования абсолютного значения отклонения скорости дискриминатора полярности, преобразователя напряжения - частота, трехфазного кольцевого счетчика, первого и второго усилителей, блока измерения напряжения, выполненного в виде последовательно соединенных усилителя, RC-фильтра и выпрямителя, соединенного с выходом инвертора, генератора пилообразного напряжения и широтноимпульсного модулятора, составленного из трех компараторов, первые входы которых соединены с генератором пилообразного напряжения, а выходы через блоки синхронизации - с управляющими входами инвертора, при этом выходы первого и второго формирователей абсолютное значение отклонений скорости соединены с входами первого умножителя, выход которого соединен с вторым блоком сравнения, второй вход которого соединен с выходом блока измерения напряжения, выход второго блока сравнения связан с входом второго умножителя,, выходы которого подсоединены к вторым входам трех компараторов, а вход второго умножителя через кольцевой счетчик соединен с преобразователем напряжение частота, вход которого через второй блок формирования абсолютного значения отклонения скорости соединен с выходом блока суммирования, к которому через дискриминатор полярности подсоединен вход кольцевого счетчика, вход первого блока формирования абсолютного значения отклонения скорости соединен с выходом нелинейного блока. На фиг. 1 приведено устройство для управления асинхронным двигателем; на фиг. 2 - временные диаграммы его работы. Устройство для управления асинхронным двигателем содержит трехфазHbtfi источник 1 переменного тока, которьп подключен к двухполупериодному выпрямителю 2, выход которого соедннен с инвертором 3 напряжения. К выходу инвертора .3 подключен асинхронньй двигатель 4, на валу которого установлен измеритель 5 реальной ско рости вращения двигателя. Блок 6 задания скорости соединен с первым блоком 7 сравнения, второй вход которого подключен к измерителю 5 реальной скорости вращения. Выход первого блока 7 сравнения соединен через нелинейный блок 8 с блоком 9 сум мирования. Блок 10 является блоком формирования сигнала абсолютного зна чения отклонения скорости, блок 11 блоком формирования сигнала абсолютного значения отклонения скорости от результата суммирования блока 9, а блок 12 является дискриминатором полярности сигнала блока 9 суммирования-. Выход блока 9 суммирования через блок 11 подсоединен к преобразователю 13 напряжение - частота, выход которого соединен с трехфазным кольцевым счетчиком 14, второй вход которого соединен с выходом блока 12. Блок регулирования напряжения и частоты инвертора 3, кроме указанного преобразователя 13 напряжение частота, кольцевого счетчика 14, содержит первый умножитель 15, блок измерения напряжения, состоящий из выпрямителя 16, RC-фильтра 17 и усилителя 18. Кроме того, в блок регулирования входит усилитель 19, второй блок сравнения 20, второй умножитель 21, генератор пилообразного напряжения 22, широтно-импульсный модулятор, состояпщй из трех компараторов 23 и блоков синхронизации 24-29, выходы которых соединены с управляющими входами инвертора 3 При этом выход трехфазного кольцевого счетчика 14 соединен с первыми входами второго умножителя 21, второ вход которого соединен через усилитель 19 с выходом сумматора 20, первый вход которого соединен с блоком измерения напряжения, а второй - с выходом первого умножителя 15, входы KOTOpoio через блоки 10 и 11 соединены соответственно с нелинейным блоком 8 и с выходом блока 9 суммирования. Трехфазный источник 1 переменного тока подает синусоидальный, трехфазный переменньп ток на двухполупериодный выпрямитель 2, состоящий из диодов, который пьфабатыпает напряжение постоянного тока. Инвертор 3, состоящий из силовых транзисторов и диодов, получает выпрямленное напряжение от выпрямителя 2 и преобразует это напряжение в трехфазное напряжение переменного тока, которое имеет ступенчатую, близкую к синусоидальной, форму напряжения, эффективное значение которого можно изменять управлением двухпозиционной синхронизацией силовых транзисторов. Трехфазный асинхрон1 ый двигатель 4 имеет вал, на котором установлен измеритель 5 скорости реальной, например тахометр, причем последний вырабатывает аналоговое напряжение, пропорциональное скорости вращения h двигателя. Блок 6 задания скорости подает на первый блок 7 сравнения аналоговое напряжение, пропорциональное скорости п, блок 7 сравнения вырабатывает выходное напр,яжение, пропорциональное отклонению (п.-п) между заданной скоростью и реальной скоростью. Нелинейньп блок 8 включает усилитель ошибки, имеющий характеристику первоначальной задержки или цепи ограничения. Блок 9 суммирования предназначен для суммирования реальной скорости и сигнала с выхода блока 8. Блок 10 формирования абсолютного значения производит выходной сигнал, представляющий абсолютное значение отклонения скорости (п,-п), а блок 11 абсолютного значения производит выходной сигнал, представляющий абсолютное значение сигнала скорости, полученного в блоке 9 суммирования. Преобразователь 13 напряжение - частота выдаеч Ц почку импульсов, частота которых пропорциональна напряжению, подаваемому блоком 11 формирования абсолютного значения. Кольцевой счетчик 14 имеет три состояния триггера, KOTOpi.ie вырабатывают трехфазные прямоугольные сиг(шлы AS, BS и CS, последовательно сдвинутые по фазе на 27/3 (фиг. 2). Направление фазы вращения трехфазных прямоугольных сигналов AS,BS, CS определяется выходом дискриминатора 12 полярности. Первый умножитель 15 умножает значение отклонения скорости () на выход (Пр) блока 11 и выдает выходное напряжение ), соответствующее отклоне11ию скорости и сигналу скорости . Двухполупериодный выпрямитель 16 выпрямляет трехфазное напряжение переменного тока, получаемое от инвертора 3. Фильтр нижних частот, содержащий резисторы и конденсатор, осуществляет сглаживание пульсаций выпрямленного напряжения постоянного тока, подавае мого выпрямителем 16. Второй умножитель 21 умножает прямоугольные сигна лы AS, BS, CS на выходе усилителя 19 и вьщает трехфазные прямоугольные сигналы AS , BS , CS , амплитуды которых соответствуют отклонению скорости и сигналу скорости. Генератор 22 пилообразного напряжения вырабатывает пилообразньй сигнал STS с периодом, значительно мень шим, чем у сигналов AS , BS , CS . Три компаратора 23 сравнивают амплитуды пилообразного сигнала и сигналов AS , BS , CS и каждый вырабаты вает выходной сигнал. Другими слова ми, генератор 22 пилообразного напря жения, умножитель 21 и три компара тора 23 составляют цепь модулятора ширины импульсов, предназначенного для управления фазой сигналов АРМ, ВРМ, СРМ (фиг. 2), которые соответсигналов AS ственно состоят из BS, CS после их модулирования по ширине импульса в соответствии с их амплитудами. Выходы блоков 23 через блоки 24-29 синхронизации подают свои выходные сигналы на соответствую1дие базы силовых транзисторов инвертора 3. Устройство работает следующим образом. Если асинхронный электродвигатель 4 вращается при указанных условиях, то изменение нагрузки вызывает изменение реальной скорости п двигателя. Предположим, что нагрузк увеличилась, вызвав падение скорости п. Реальная скорость п определя ется тахометром 5, вырабатывающим выходное напряжение, пропорциональ но ей. Блок 7 сравнения определяет разность мезкду заданной скоростью п выдаваемой блоком 6 задания скорост и сигналом реальной скорости двигателя п, подаваемом тахометром, и 16 ырабатывает выходной сигнал, предтавляющий разность . Этот сигал подается на нелинейный блок 8, ак как блок 8 содержит ограничитель, о его выход представляет отклонение корости , если отклонение скоости мало. Однако, если отклонение корости велико, то выход блока 8 ьщает К(), где 1{ . Этот сигнал кладывается со значением реальной скорости в блоке 9 суммирования, ей выход, а именно сигнал скорости п эквивалентен заданной скорости п, если выход блока 8 равен , или значению п+К(П(.-п) , если выход блока 8 равен К (П{.-п). Значение п+К (пс-п) получается путем слоясения предписанного количества К(П(,-п и реальной скорости п и служит для постепенного увеличения или уменьшения реальной скорости двигателя 4, когда отклонение скорости велико, до тех пор, пока реальная скорость не достигнет значения заданной скоЗдесь предполагается, Р с что выход сумматора 9 является п-. Заданная скорость п., подается на блок 11 формирования абсолютного значения и дискриминатор 12 полярности, которьм обрабатывает сигнал, разделяя его на сигнал абсолютного , значения и сигнал направления вращения RDS. Сигнал абсолютного значения Пр подается на преобразователь 13 напряжение - частота, преобразующий его в последовательность импульсов ЕР, частота которых пропорциональна ему (фиг. 2). Кольцевой счетчик 14 получает сигнал направления вращения ELDS, вьщаваемый дискриминатором 12 полярности, и последовательности импульсов от преобразователя 13 и вырабатывает трехфазные прямоугольные сигналы AS, BS, CS, которые помимо их фиксированного амплитудного значения пропорциональны по частоте заданному сигналу п и представляют предписанные направления вращения фазы. Сигналы AS, ВЗ, CS в свою очередь подаются на второйумножитель 21. В это время сигнал отклонения скорости, вьщанный блоком 8, преобразуется в сигнал абсолютного значения отклонения скорости блоком 10. Этот сигнал, а именно п.-п, вместе с сигналом абсолютного значения п из блока 11используется дляосуществления управления. К этому времени сигналы Пр-п и п. уже перемножены в первом умножителе 15, вырабатывающем управляющий сигнал, величина которого является произведением )-П(., вьщаваемьпч первым умножителем 15. Двигатель 4 продолжает вращаться ниже заданной скорости и предписанного отклонения скорости, и увеличение нагрузки увеличит отклонение скорости, а тем самым, и амплитуду сигнала CCS. Параллельно с работой предьщущей цепи трехфазное напряжение переменного тока Уц , V, и от цепи инвертора 3 выпрямляется двухполу1периодным выпрямителем 16. RC-фйльтр .17 сглаживает пульсации напряжения постоянного тока и вырабатывает выходной сигнал, пропорциональный общей ошибке, происходящей из-за колебаний напряжения в источнике 1 и ошибки в системе управления фазой, управляющей инвертором 3. Блок 20 сравнения обрабатывает управляющий сигнал CCS и напряжение постоянного Toica, вырабатываемое фильтром. 17, и вычисляет их разность. Другими словами, сигнал CCS корректируется в соответствии с ошибкой, вызываемой колебаниями напряжения, и с ошибкой в системе управления фазой. Скорректированный сигнал CCS подается на умнолситель 21 через усилитель 19, ко Topbui, поскольку он получает AS, BS, CS, умножает эти сигналы на сигнал CCS, вырабатывая трехфазные прямоугольные сигналы AS, BS, CS, соответствующие по амплитуде сигналу отклонения скорости (Пр-п) и заданной скорости (пр), а по частоте - пропорциональны сигналу П(;. Компараторы 23 соответственно сравнивают пиковые значения сигналов AS , BS , CS с амплитудой пилообраз ного сигнала STS, выдаваемого генера тором 22 пилообразного сигнала. Каждьй компаратор приспособлен для выра ботки логического выхода Внесли амплитуда сигналов AS, ----BS , CS больше, чем амплитуда пилообразного сиг нала. Таким образом, три компаратора 23 вырабатывают сигналы управления фазой АРМ, ВРМ, СРМ трех фаз, сигналы модулируются в соответствии с амплитудой каждого прямоугольного си нала АРМ, ВРМ, СРМ. Отметим, что зна чения эффективного напряжения каждого сигнала АРМ, ВРМ,СРМ управления . фазой пропорциональны отклонению скорости П(.-п и заданной скорости п, потому что амплитуда каждого из сиг- налов AS, BS , CS пропорциональна и п, . Кроме того, частота каждого из сигналов АРМ, ВРМ, СРМ управления фазой пропорциональна заданной скорости Пс, так как частота сигналов AS , BSи CS пропорциончльна ей. Селекторы НЕТ - НЕТ g в блоках 24-29 синхронизации используют сигналы АРМ, ВРМ, СРМ управления фазой для выработки синхронизирующих сигналов АРМ, АРМ, ВРМ, ВРМ, СРМ, СРМ для управления работой транзисторов в инверторе 3. Эти синхронизирующие сигналы синхронизируют последовательно транзисторы инвертора 3 так, что происходит формирование ступенчатого напряжения переменного тока Vjjy, (фиг. 2). Эти трехфазные напряжения Vyy, Vy,, .V;, подаются как первоначальное напряжение на двигатель 4 и служат для управления его скоростью. Кроме того, эффективное значение этих трехфазных напряжений пропорционально отклонению скорости (П(,-п) и заданной скорости П;-., а первоначальная частота пропорциональна заданной скорости, т.е. с. орость двигателя 4 регулируется. Описанная операция повторяется до тех, пока отклонение между реальной скоростью и заданной скоростью не достигнет предписанной величины. Более того эффективные значения трехфазных напряжений переменного тока V VWY зависят от отклонения скорости . Кроме того, отклонение скорости приблизительно пропорционально степени колебания нагрузки. Таким образом, если реальная скорость падает, т.е. отклонение скорости п,-п возрастает за счет увеличения нагрузки, эффективное значение первоначального напряжения OV vw Viv становится больше, за счет чего увеличивается вырабатываемый вращающий момент. С другой стороны, если реальная скорость увеличивается или отклонение скооости уменьшается за счет снижения нагрузj j эффективное значение этого первоначального напряжения становится меньше, за счет чего уменьшается вращающий момент.
91
Лналогкчмо устройство работает при изменении моментов нагрузки и запуска двигателя. I.
Такиь образом, в соответствии с изобретением индуктивный электродвигатель, управляемый изменением напряжения и изменением частоты, может плавно вращаться даже на низкой частоте и при малой нагрузке. Это возможно потому, что вырабатываемый
Ч264110
вращающим момент и пульсация вращающего момента во время уменьшения нагрузки минимизируется за счет того, что эффективное значение напряжения 5 становится меньше. С другой стороны, большое отклонение скорости, вызываемое увеличением нагрузки, сопровождается увеличением эффективного значения, что немедленно ведет к 10 выработке больщого вращающего момента. БР JUUUUUUIJJLJIJ 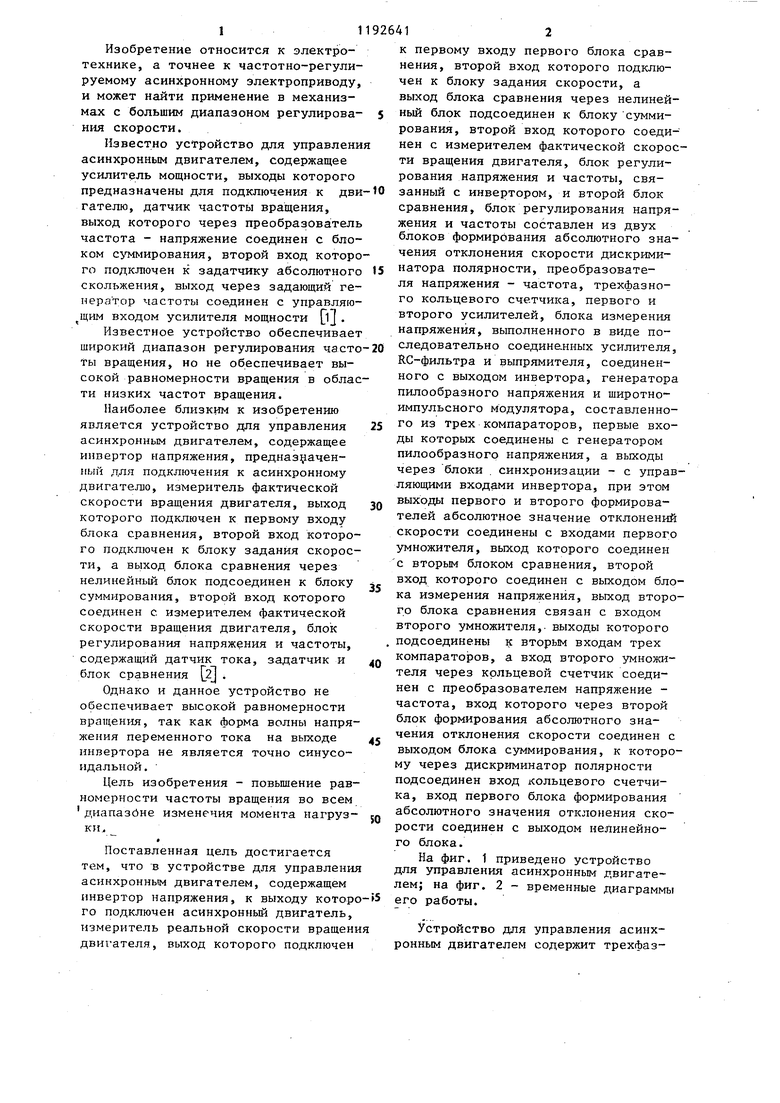
| название | год | авторы | номер документа |
|---|---|---|---|
| Асинхронный электропривод | 1981 |
|
SU1327806A3 |
| Электропривод переменного тока | 1980 |
|
SU1114358A3 |
| Система управления для остановки шпинделя в определенном угловом положении | 1980 |
|
SU1308185A3 |
| Реверсивный электропривод постоянного тока | 1979 |
|
SU1056930A3 |
| Электропривод переменного тока | 1979 |
|
SU1450765A3 |
| Устройство для управления асинхронным электродвигателем | 1980 |
|
SU1421270A3 |
| Устройство для управления остановом шпинделя в заданном положении | 1980 |
|
SU1175357A3 |
| Устройство для останова шпинделя в заданном положении | 1980 |
|
SU1165226A3 |
| Устройство для остановки шпинделя в заданном положении | 1980 |
|
SU1148555A3 |
| Устройство для управления шаговым двигателем | 1973 |
|
SU712053A3 |
УСТРОЙСТВОдля УПРАВЛЕНИЯ АСЙНХРОННЬМ ДВИГАТЕЛЕМ, содержащее инвертор напряжения, предназначенный для подключения к асинхронному двигателю, измеритель реальной скорости вращения двигателя, выход которого под1шючен к первому входу первого блока сравнения, второй вход которого подключен к блоку задания скорости, а выход блока сравнения через нелинейный блок подсоединен к блоку суммирования, второй вход которого соединен с измерителем фактической скорости вращения двигателя, блок регулирования напряжения и частоты, связанный с инвертором, и второй блок сравнения, отличающееся тем, что, с целью повьшения равномерности частоты вращения, блок регулирования напряжения и частоты составлен из двух блоков формирования абсолютного значения отклонения скорости дискриминатора полярности, преобразователя напряжение - частота, трехфазного кольцевого счетчика, перво- , го и второго умножителей, блока измерения напряжения, выполненного в виде последовательно соединенных усилителя КС-фильтра и вьшрямителя, соединенного с выходом инвертора, генератора пилообразного напряжения и широтно-импульсного модулятора, составленного из трех компараторов, первые входы которых соединены с генератором пилообразного напряжения, а выход через блоки синхронизации - с управляющими входами инверс S тора, при этом выходы первого и второго формирователей абсолютного зна(Л чения отклонения скорости соединены с с входами первого умножителя, выход которого соединен с вторым блоком сравнения, второй вход которого соединен с выходом блока измерения напряжения, выход второго блока срав- , нения связан с входом второго умножителя, выходы которого подсоединены к вторым входам трех компараторов, а вход второго умножителя через кольцевой счетчик соединен с преобразователем напряжение - частота, вход которого через второй блок формирования абсолютного значения отклонения скорости соединен с выходом блока суммирования, к которому через дискриминатор полярности подсоединен вход кольцевого счетчика, вход первого блока формирования абсолютного значения отклонения скорости соединен с выходом нелинейного блока.
| Труды ВНИИЭМ | |||
| Механический грохот | 1922 |
|
SU41A1 |
| Металлические подъемные леса | 1921 |
|
SU242A1 |
| Железобетонный фасонный камень для кладки стен | 1920 |
|
SU45A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
