ел
со сд |
.1 11
Изобретение относится к станкостроению, а именно к устройствам для управления остановом шпинделя в заданном положении.
Известно устройство для управления остановом шпинделя в заданном положении, содержащее блок задания скорости шпинделя и блок ориентации шпинделя, полученные через двухпозиционный переключатель с приводом к одному входу блока регулирования скорости шпинделя, другой вход которого соединен с датчиком скорости шпинделя, блок задания режимов, соединенньш с приводом переключателя, и датчик положения шпинделя, соединенный с входом блока ориентации шпинделя l .
Однако известное устройство не обеспечивает высокую точность управления остановом шпинделя в заданном положении.
Целью изобретения является повьш1е ние точности управления остановом шпинделя в заданном положении.
Указанная цель достигается тем, что устройство для управления остановом шпинделя в заданном положении, содержащее блок задания скорости шпинделя и блок ориентации шпинделя, подключенные через двухпозиционный переключатель с приводом к одному входу блока регулирования скорости шпинделя, другой вход которого соединен с датчиком скорости шпинделя, блок задания режимов, соединенный с приводом переключателя, датчик положения шпинделя, соединенный с входом блока ориентации шпинделя, снабжено блоком формирования сигнала и переключателем коэффициента усиления блока регулирования скорости шпинделя, причем блок формирования сигнала выполнен в виде компараторов и логического элемента И, выход которого связан с переключателем коэффициента усиления, а входы через компараторы соединены соответственно с выходом блока ориентации шпинделя, выходом блока задания режимов и выходом датчика скорости шпинделя.
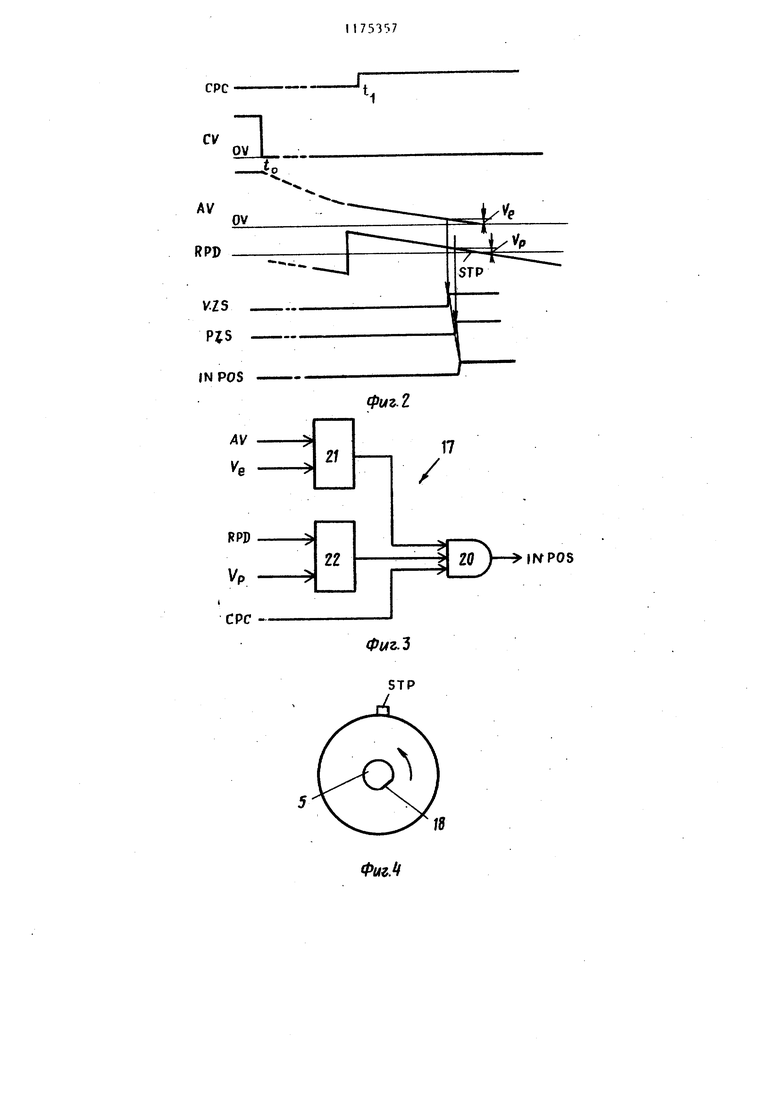
.На фиг. 1 изображено устройство для управления остановом шпинделя в заданном положении; на фиг. 2 - формы сигналов в устройстве; на фиг. 3 блок формирования сигнала в позиции, на фиг. 4 - расположение деталей устройства в работе; на фиг.5 53572
блок ориентации шпинделя; на фиг.6 формы сигналов в блоке ориентации шпинделя, на фиг. 7 -. график зависимости тока якоря от отклонения 5 скорости.
Устройство содержит двигатель 1 постоянного тока, датчик 2 с-корости шпинделя 3, инструмент 4, шпиндельный механизм 5, в котором установлен.
o инструмент. Шпиндель 3 связан с двигателем постоянного тока посредством ремня (или зубчатой передачи) 6, датчик 7 положения шпинделя 3 непосредственно связан со шпинделем и служит
15 для выработки сигнала, соответствующего угловому положению шпинделя. Двухпозиционный переключатель 8 снабжен приводом. Блок 9 задания ско. рости шпинделя 3 служит для выработ-
0 ки сигнала заданной скорости CV.
Блок 10 задания режимов предназначен для выработки сигнала заданной ориентации СРС. Блок 11 регулирования скорости шпинделя 3 содержит сумматор 12 для подачи разностороннего напряжения между сигналом заданной скорости CV и сигналом действительной скорости AV от датчика скорости шпинделя, переключатель 13 коэффициента усиления для обеспечения фазовой компенсации в устройстве посредством опережения или замедления фазы, а также тиристорную схему 14, содержащую ряд тиристоров.Тиристорная схема служит для регулирования напряжения, подаваемого на двигатель постоянного тока.. Блок регулирования скорости шпинделя также содержит схему 15 преобразования напряжения в фазу для управле-ния углом зажигания каждого тиристора в тиристорной схеме согласно отклонению между сигналом заданной скорости CV и сигналом действительной скорости AV таким образом, что приложенное к .двигателю постоянного .тока напряжение возрастает при увеличении отклонения и уменьшается при малом отклонении, чтобы скорость двигателя постоянного тока соответствовала
50 заданной скорости. Блок задания режимов служит для переключения : подвижного контакта двухпозиц1юнного переключателя. Блок 16 ориентации шпинделя предназначен для создания
55 сигнала завершения ориентации PSC
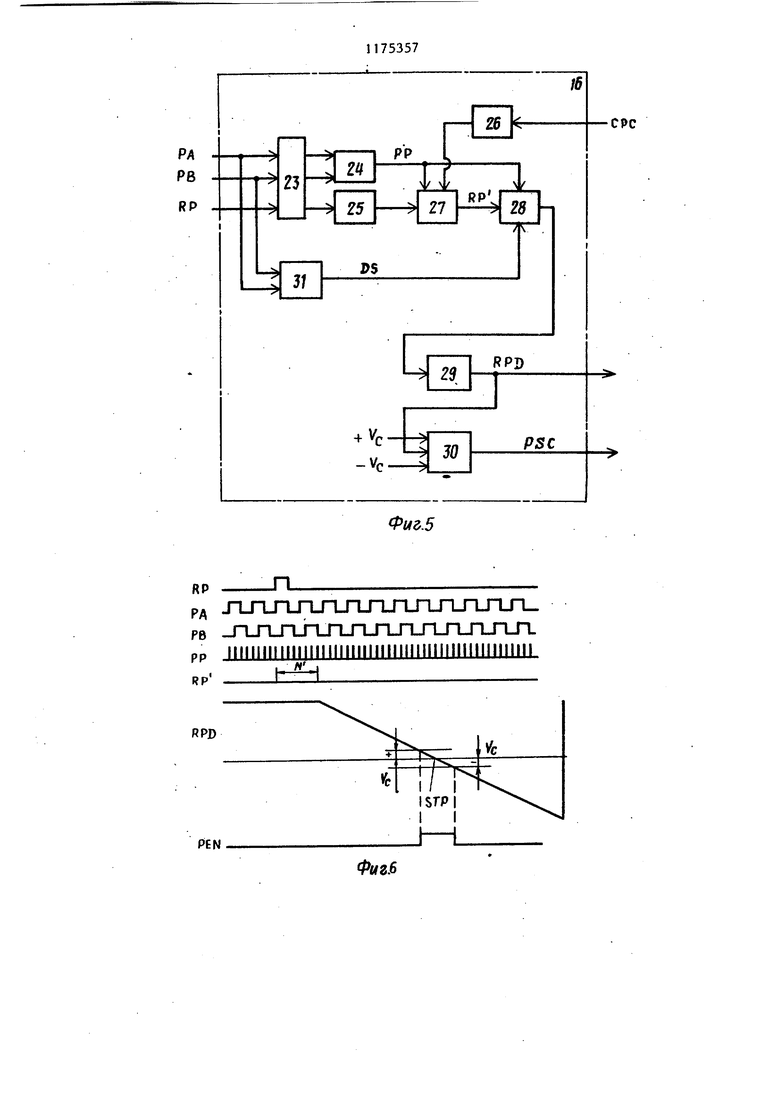
при окончании точной устаж вкн шпин деля . Блок 17 формирования сигнала в позиции служит д.ия ныработи сигнала в позиции 1NPOS в тот момент, когда некоторая определенная точка на шпинделе участка 18 ориентации (фиг. 4) приблизится к окрест ности заданного положения останова. Блок задания режимов, блок ориентации шпинделя и блок формирования сиГ-нала в позиции образуют схему 19 управления ориентацией. Блок 17 формирования сигнала в позиции 1NPOS выполнен в виде логического элемента И 20, выход которого связа с переключателем коэффициента усиле |ния для переключения коэффициента усиления, входы через компараторы 21 и 22. соединены соответственно с выходом блока ориентации шпинделя, выходом блока задания режимов и выходом датчика скорости шпинделя. Блок 16 ориентации шпинделя содержи приемник 23 для получения позиционных импульсов РА и РВ от датчика 7 положения шпинделя и импульса одног поворота RP. Схема 24 учетверения служит для дифференцирования позиционных импульсов РА и РВ и выработ ки импульса РР, совпадающего с поло жительными и отрицательньши отклоне ниями импульсов РА, РВ и получения последовательности импульсов с частотой, в четыре раза превьш ающей частоту импульсных последовательностей РА и РВ. Схема 25 служит для отделения импульса одного оборота RP. Блок 16 включает в себя переклю чатель 26 ввода позиции останова, схему 27 определения положения оста нова, служащую для вьщачи импульса RP, и реверсивный счетчик 28. Выхо счетчика 28 связан с входом цифроан логового преобразователя 29, выход которого соединен со схемой 30 отсечки, служащей для сравнивания сиг нала позиционного отклонения RPD с постоянным напряжением Vc, -Vc и генерирования сигнала завершения ориентации PSC, когда сигнал RPD находится между двумя уровнями +Vc -Vc. Схема 31.распознавания направ ления контролирует фазы позиционных сигналов РА, РВ для распознавания направления вращения шпинделя и посылки сигнала направления -DS в реверсивньп счетчик 28. Устройство работает следующим образом. При завершении операции механи чес. обработки (момент времени t) сигнал заданной скорости CV от блока задания скорости шпинделя уменьшается до нуля вольт, в результате начинает уменьшаться сигнал действительной скорости AV двигателя 1 постоянного тока. Блок 10 задания режимов генерирует в предопределенный момент времени t{ сигнал заданной ориентации СРС. Момент t находится непосредственно перед моментом остановки двигателя. Можно сделать так, что сигнал СРС будет генерир-оваться автоматически в предопределенньш момент времени после создания сигнала, останавливающего двигатель, или же, когда сигнал действительной скорости AV упадет ниже фиксированного уровня после создания упомянутого сигнала. Генерация сигнала ориентации СРС переключаэт подвижной контакт переключателя 8, в результате чего активируется контур обратной связи управления положением. Теперь сумматор 12 вырабатывает разностное напряжение между сигналом позиционного отклонения RPD от блока 16 ориентации шпинделя и сигналом действительной скорости AV от датчика 2 скорости шпинделя. Разностное напряжение прикладьшается через переключатель 13 коэффициента усиления к схеме 15 преобразования напряжения в фазу, которая управляет углом зажигания каждого тиристора в тиристорной схеме 14 согласно величине и полярности разностного напряжения, изменяя тем самым напряжение, приложенное к двигателю 1 постоянного тока. В результате скорость двигателя 1 дополнительно уменьшается, и разностное напряжение стремится к нулю. Тем временем сигнал заданной ориентации СРС, сигнал действительной скорости AV и сигнал позиционного отклонения RPD поступают на блок 17 формирования сигнала в позиции, предназначенного для генерации сигнала в Положении 1NPOS в случае, когда одновременно равны сигнал заданной ориентации СРС и сигналы VZS и PZS. Сигнал VZS, образованный в блоке 17 формирования сигнала в позиции, становится равным логической 1 в случае, когда сигнал действительной скорости AV падает в сущности до нуля, т. е. когда он достигает некоторого низкого уровня Ve. Сигнал
PZS, также образованный в блоке 17 формирования сигнала в позиции, становится равным логической 1 в случае, когда сигнал позиционного отклонения RPD падает ниже предопределенного уровня Vp. Итак, когда уровень трех сигналов СРС VZS, PZS становится высоким, выходной сигнал логического элемента И 20, содержащегося в блоке 17 формирования сигнала в позиции и воспринимающего все эти три сигнала, достигает уровня логической 1, в. результате возрастает сигнал Б положении 1NPOS. Первый компаратор 21 подает сигнал VZS логической 1 на первый вход логического элемента И, когда сигнал действительной скорости AV достигает низкого уровня Ve, а второй компаратор 22 подает сигнал PZS логической 1 на второй вход логическог элемента И, когда сигнал позиционного отклонения RPD падает ниже предопределенного уровня Vp. Логический элемент И выполняет логическое перемножение выходных сигналов VZS, PZS первого и второго компараторов и сигнала заданной ориентации СРС и генерирует сигнал в позиции 1NPOS, когда три сигнала СРС, VZS, PZS принимают высокий уровень. Этот сигнал передается переключателю 13 коэффициента усиления, в результате коэффициент усиления возрастает в два или три раза. Предпочтительна генерация сигнала в положении 1NPOS в случае, когда определенная точка на шпинделе находится в диапазоне 3-5 относительно предопределенного положения останова. Псгсле генерации сигнала в положении 1NPOS контур обратной связи управления положением действует по останову определенной точки на шпинделе (например, участке 18 ориентации на фиг. 4) точно в положении останова.
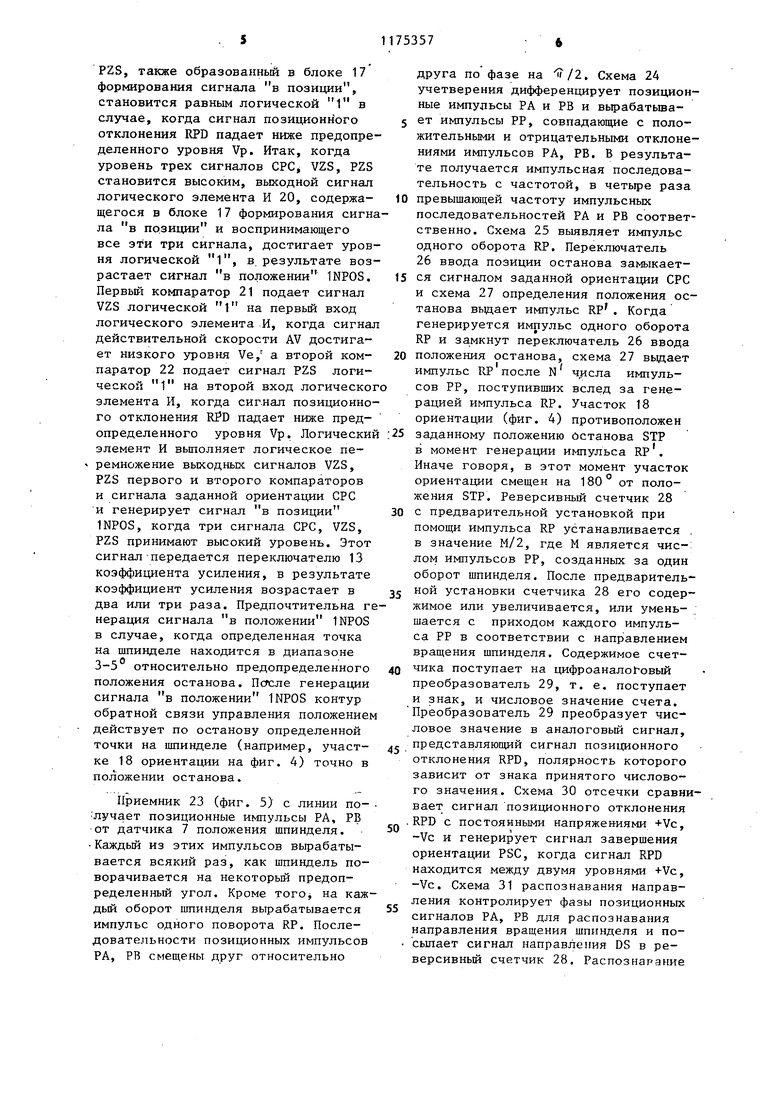
Приемник 23 (фиг. 5) с линии получает позиционные импульсы РА, РВ от датчика 7 положения шпинделя.
Каждьй из этих импульсов вырабатывается всякий раз, как шпиндель поворачивается на некоторый предопределенный угол. Кроме TorOj на каждый оборот шпинделя вырабатывается импульс одного поворота RP. Последовательности позиционных импульсов РА, РВ смещены друг относительно
друга по фазе на . Схема 24 учетверения дифференцирует позиционные импульсы РА и РВ и вырабатьшает импульсы РР, совпадающие с положительными и отрицательными отклонениями импульсов РА, РВ. В результате получается импульсная последовательность с частотой, в четыре раза превышающей частоту импульсных последовательностей РА и РВ соответственно. Схема 25 выявляет импульс одного оборота RP. Переключатель 26 ввода позиции останова замыкается сигналом заданной ориентации СРС и схема 27 определения положения останова вьщает импульс RP . Когда генерируется импульс одного оборота RP и замкнут переключатель 26 ввода положения останова, схема 27 выдает импульс RP после N числа импульсов РР, поступивших вслед за генерацией импульса RP. Участок 18 ориентации (фиг. 4) противоположен заданному положению Останова STP в момент генерации импульса RP . Иначе говоря, в этот момент участок ориентации смещен на 180 от положения STP. Реверсивный счетчик 28 с предварительной установкой при помощи импульса RP устанавливается в значение М/2, где М является числом импульсов РР, созданных за один оборот шпинделя. После предварительной установки счетчика 28 его содержимое или увеличивается, или уменьшается с приходом каждого импульса РР в соответствии с направлением вращения шпинделя. Содержимое счетчика поступает на цифроаналоговый преобразователь 29, т. е. поступает и знак, и числовое значение счета.
Преобразователь 29 преобразует числовое значение в аналоговый сигнал, представляющий сигнал позиционного отклонения RPD, полярность которого зависит от знака принятого числового значения. Схема 30 отсечки сравнвает сигнал позиционного отклонения
.RPD с постоянными напряжениями +VC, -Vc и генерирует сигнал завершения ориентации PSC, когда сигнал RPD находится между двумя уровнями +Vc, -Vc. Схема 31 распознавания направления контролирует фазы позиционных сигналов РА, РВ для распознавания направления вращения шпинделя и посылает сигнал направления DS в реверсивньй счетчик 28. Распознарэние
направления основано на том, что позиционные импульсы РА опережают по фазе позиционные импульсы РВ при вращении шпинделя вперед отстают от позиционных импульсов РВ при вращени щпинделя в обратном направлении. Следовательно, сигнал позиционного отклонения RPD (фиг. 6) от цифроаналогового преобразователя 29 находится в соответствии с вращательным положением шпинделя. Этот сигнал поступает в блок 11 регулирования скорости шпинделя через переключатель 8, после чего происходит вьшолнение операции по управлению положением.
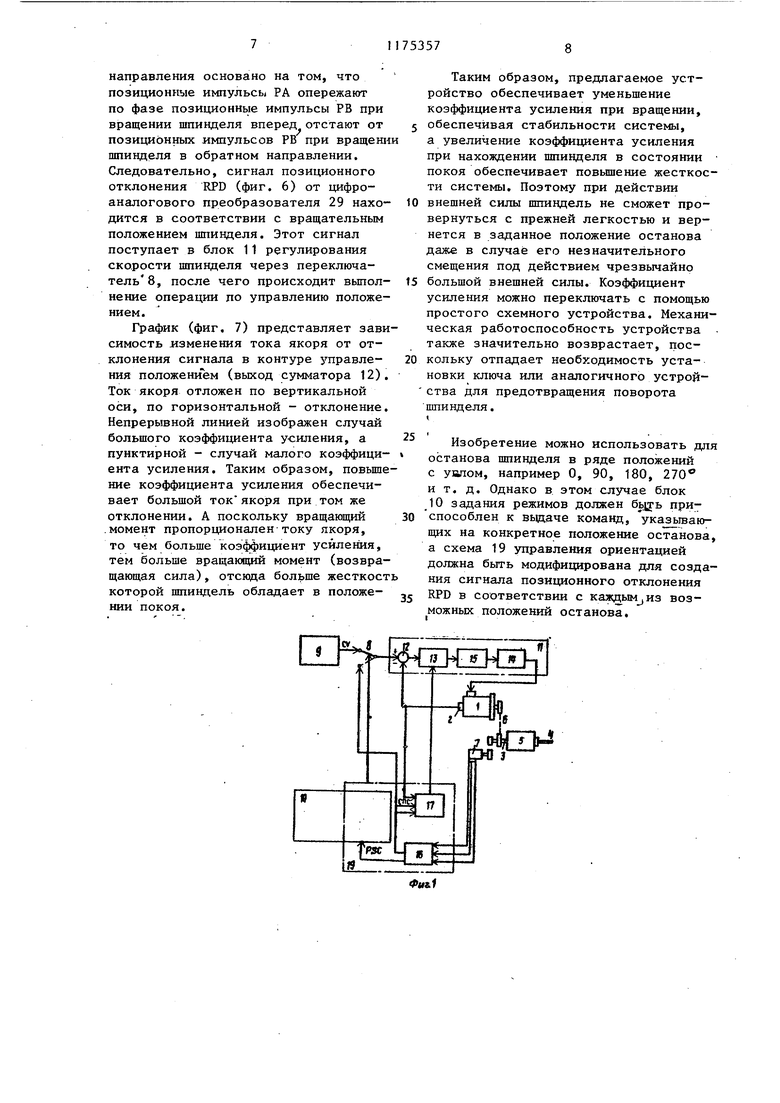
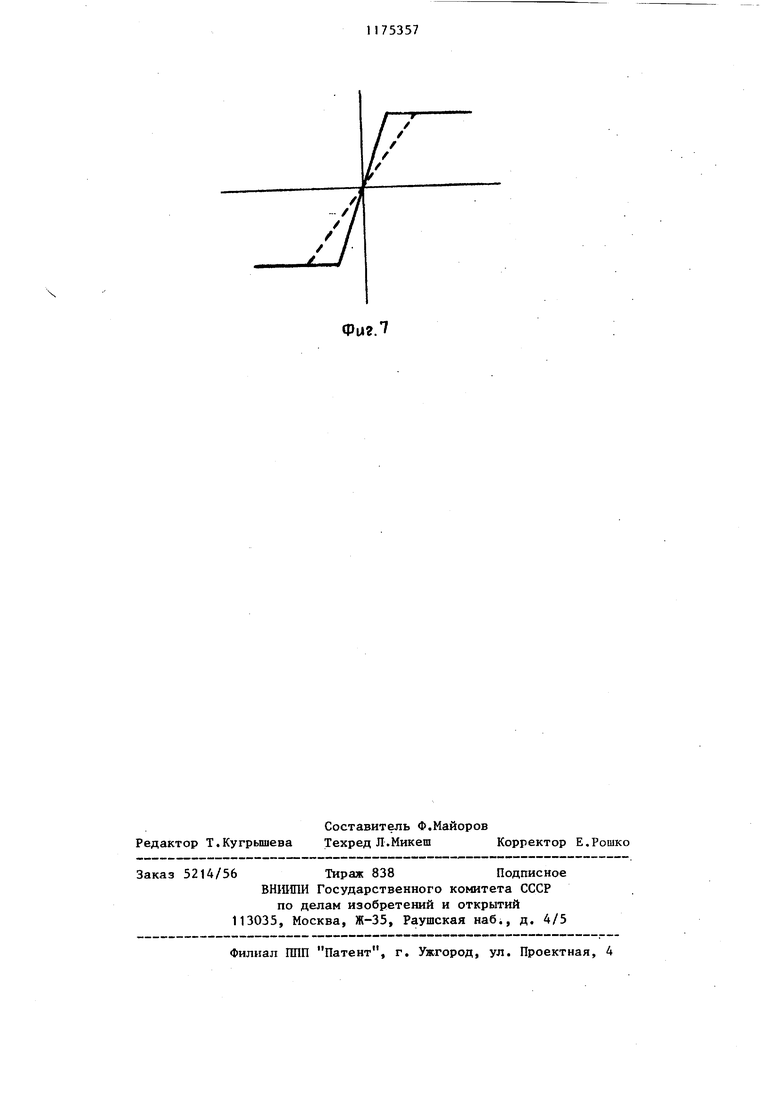
График (фиг. 7) представляет зависимость изменения тока якоря от отклонения сигнала в контуре управления положением (выход сумматора 12). Ток якоря отложен по вертикальной оси, по горизонтальной - отклонение. Непрерывной линией изображен случай большого коэффициента усиления, а пунктирной - случай малого коэффициента усиления. Таким образом, повьш1ение коэффициента усиления обеспечивает большой токякоря при том же
отклонении. А поскольку вращающий .момент пропорционален току лкоря,
то чем больше коэффициент усиления, тем больше вращающий момент (возвращающая сила), отсюда больше жесткост которой шпиндель обладает в положе- НИИ покоя.
Таким образом, предлагаемое устройство обеспечивает уменьшение коэффициента усиления при вращении, обеспечивая стабильности системы, а увеличение коэффициента усиления при нахождении шпинделя в состоянии покоя обеспечивает повышение жесткости системы. Поэтому при действии внешней силы шпиндель не сможет провернуться с прежней легкостью и вернется в заданное положение останова даже в случае его незначительного смещения под действием чрезвычайно большой внешней силы. Коэффициент усиления можно переключать с помощью простого схемного устройства. Механическая работоспособность устройства также значительно возврастает, цоскольку отпадает необходимость установки ключа или аналогичного устройства для предотвращения поворота
шпинделя.
Изобретение можно использовать дл останова шпинделя в ряде положений с увлом, например О, 90, 180, 270 и т, д. Однако в этом случае блок 10 задания режимов должен бъцъ приспособлен к вьщаче команд, указьгоающих на конкретное положение останова а схема 19 управления ориентацией должна быть модифицирована для создания сигнала позиционного отклонения RPD в соответствии с каяздым из возможных положений останова.
cv
ov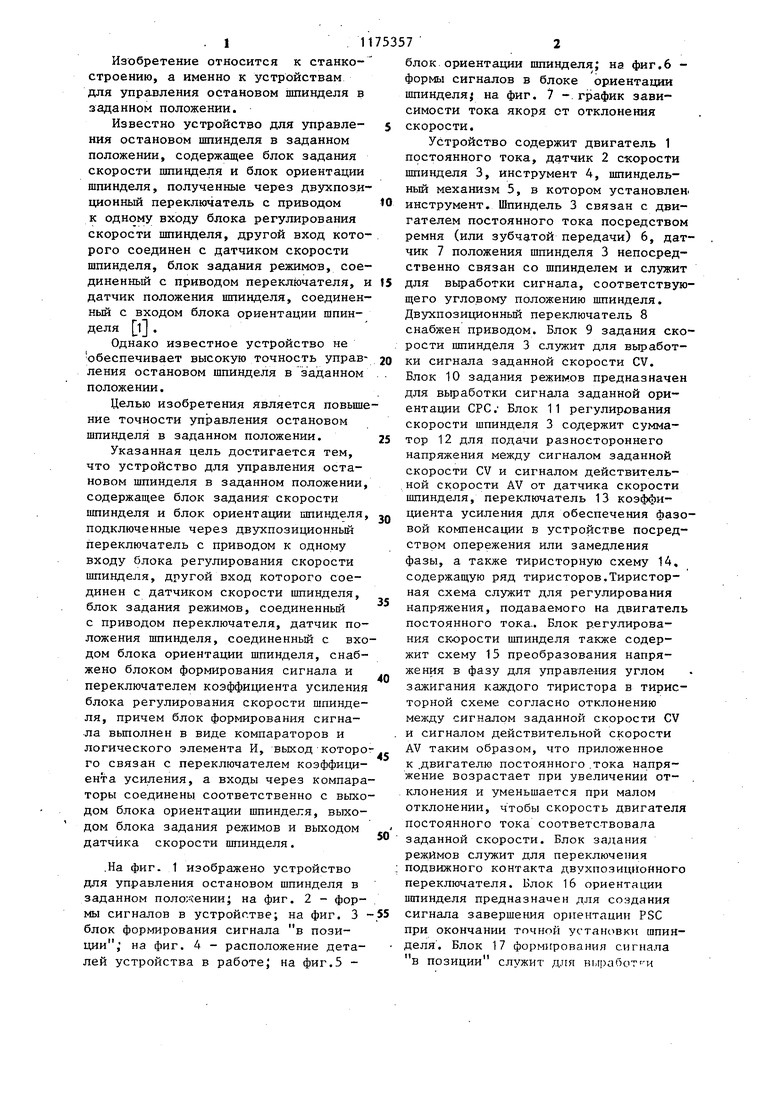
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для останова шпинделя в заданном положении | 1980 |
|
SU1165226A3 |
| Система управления для остановки шпинделя в определенном угловом положении | 1980 |
|
SU1308185A3 |
| Устройство для остановки шпинделя в заданном положении | 1980 |
|
SU1148555A3 |
| Устройство управления ориентацией шпинделя | 1981 |
|
SU1258316A3 |
| Асинхронный электропривод | 1981 |
|
SU1327806A3 |
| Система управления шпинделем | 1978 |
|
SU724081A3 |
| Устройство для управления асинхронным двигателем | 1979 |
|
SU1192641A3 |
| Система управления шпинделем | 1978 |
|
SU831060A3 |
| Частотно-регулируемый электропривод | 1980 |
|
SU1210676A3 |
| Электропривод переменного тока | 1979 |
|
SU1450765A3 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОСТАНОВОМ ШПИНДЕЛЯ В ЗАДАННОМ ПОЛОЖЕНИИ, содержащее блок задания скорости шпинделя и блок ориентации шпинделя, .подключенные через двухпозиционный переключатель с приводом к одному входу блока регулирования скорости шпинделя, другой вход которого соединен с датчиком скорости шпинделя, блок задания режимов, соединенный с приводом переключателя, и датчик положения шпинделя, соединенный с входом блока ориентации шпинделя, отличающеес я тем, что, с целью повьш1ения точности, оно снабжено блоком формирования сигнала и переключателем коэффициента усиления блока регулирования скорости шпинделя, при этом блок формирования сигнала выполнен в виде компараторов и логического элемента И, выход которого связан с переключателем коэффициента усиления , а входы через компараторы сое(П динены соответственно с выходом блока ориентации пшинделя, выходом бло;ка задания режимов и выходом датчика скорости шпинделя.
Фиг.Ъ
PA РВ
RP
JR.
JTJlJnjTJTJTJTJnjTjnJ-LJTJ-l
J JTJглJ J J J JглJ J J.
IlllilinillllllllllllllllllllHllliniliilHllllill
tzd
Фиг.5
RPD
PEN
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система управления шпинделем | 1978 |
|
SU724081A3 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
