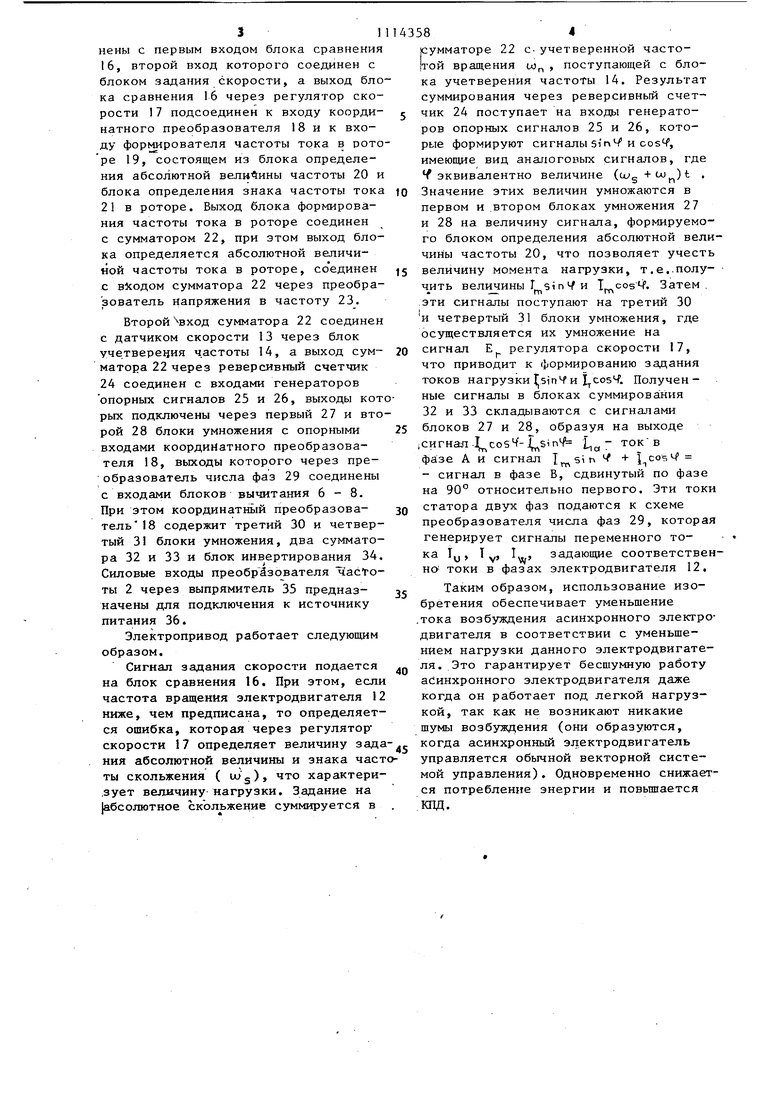
Изобретение относится к электротехнике, а точнее к электропривол; с использованием асинхронного электродвигателя, и может быть использовано в приводах, работающих с больши диапазоном изменения нагрузки. Известен электропривод переменног тока, содержащий преобразователь эне гии с регулируемым током, фазочувств тельные выпрямители, сельсин, модуля торы, датчик углового положения, тах генератор, выход которого через сумматор и усилитель соединен с фазочувствительными выпрямителями, соеди ненными с управляющими входами преобраз ователя энергии Ll. Недостаток известного электропривода состоит в невысокой надежности связанной с наличием большого числа вращающихся узлов-машин переменного и постоянного тока. Наиболее близким к предлагаемому техническим решением является электропривод переменного тока, содержащий многофазный регулируемый источ ник тока, к выходу которого подключен асинхронный электродвигатель с датчиком скорости на валу, выводы которого соединены с первым входом блока сравненния, второй вход которого соединен с блоком задания скорости, а выход блока сравнения через регулятор скорости подсоединен к первому входу координатного преобр зователя и к входу формирователя ча тоты тока в роторе,выход которого через сумматор соединен с входами генераторов опорных сигналов, а выходы генераторов опорных сигналов соединены через первый и второй бло ки умножения с опорными входами коо динатного преобразователя, выходы к торого соединены через фазовый пре.образователь с входами регулируемого источника тока, при этом второй вход сумматора соединен с датчиком скорости С2 . Недостаток известного электропри вода состоит в том, что он не обеспечивает экономичное регулирование условиях большого изменения нагрузки и создает повьппенный шум при малых нагрузках Цель изобретения - повьшение эко номичности и снижение шума при низкой нагрузке двигателя. Поставленная цель достигается те что в электроприводе переменного то содержащем асинхронный двигатель. многофазный регулируемый источник тока, к выходу которого подключен асинхронный электродвигатель с датчиком скоростей-на валу, выводы коТорого соединены с первым входом сравнения, второй вход которого соединен с блоком задания скорости, а выход блока сравнения через регулятор скорости подсоединен к первому входу координатного преобразователя и к входу формирователя частоты тока в роторе, выход которого через сумматор соединен с входами генераторов опорных сигналов, а выходы генераторов опорных сигналов соединены через первый и второй блоки умножения с опорными входами координатного преобразователя, выходы которого соединены через фазовый пре-, образователь с входами регулируемого источника тока, при этом второй вход сумматора соединен с датчиком скорости, координатный преобразователь со-, держит третий и четвертый блоки умножения, два сумматора и бл.ок инвертирования, при этом первые входы сумматоров соединены с соответствующими выходами третьего и четвертого блоков умножения, вторые входы соединены с опорными входами координатного преобразователя, выходы их являются выходами координатного преобразователя, первый вход третьего блока умножения через блок инвертирования, а первый вход четвертого лока умножения непосредственно соединены с опорными входами координатного преобразователя, вторые входы третьего и четвертого, блоков умножения ЯВЛЯЮТСЯ входом координатного преобразователя, выход формирователя частоты тока в роторе подключен к вторым входам первого и второго блоков умножения. На чертеже показан вариант выполнения электропривода переменного тока, содержащий преобразователь энергии с регулируемым током 1, состоящим из преобразователя частоты 2, датчиков тока 3-5, выходы которого подключены к блокам вычитания 6 - 8, а выходы последних через усилители 9-11 соединены с преобразователем частоты 2, к выходам которого подключен асинхронный электродвигатель 12 с датчиком скорости13 на валу. Выводы датчика скорости 13 через блок учетвереиия частоты 14, преобразователь частота - напряжение 15 соединены с первым входом блока сравнения 16, второй вход которого соединен с блоком задания скорости, а выход бло ка сравнения 16 через регулятор скорости 17 подсоединен к входу координатного преобразователя 18 и к входу формирователя частоты тока в рото ре 19, состоящем из блока определения абсолютной частоты 20 и блока определения знака частоты тока 21 в роторе. Выход блока формирования частоты тока в роторе соединен с сумматором 22, при этом выход блока определяется абсолютной величиной частоты тока в роторе, соединен с в5содом сумматора 22 через преобразователь Напряжения в частоту 23. Второй вход сумматора 22 соединен с датчиком скорости 13 через блок учетвереция ч.астоты 14, а выход сумматора 22 через реверсивный счетчик 24 соединен с входами генераторов опорных сигналов 25 и 26, выходы кот рых подключены через первый 27 и вто рой 28 блоки умножения с опорными входами координатного преобразователя 18, выходы которого через преобразователь числа фаз 29 соединены с входами блоков вычитания 6-8. При этом координатньш преобразователь18 содержит третий 30 и четвертый 31 блоки умножения, два сумматора 32 и 33 и блок инвертирования 34. Силовые входы преобр Ззователя частоты 2 через выпрямитель 35 предназначены для подключения к источнику питания 36. Электропривод работает следующим образом. Сигнал задания скорости подается на блок сравнения 16. При этом, если частота вращения электродвигателя 12 ниже, чем предписана, то определяется ошибка, которая через регуляторскорости 17 определяет величину зада ния абсолютной величины и знака част ты скольжения ( ш), что характери,зует величину нагрузки. Задание на {абсолютное скольжение суммируется в сумматоре 22 с-учетверенной часто|той вращения со , поступающей с блока учетверения частоты 14. Результат суммирования через реверсивный счетчик 24 поступает на входы генераторов опорных сигналов 25 и 26, которые формируют сигналы sin Ч и cos, имеющие вид аналоговых сигналов, где f эквивалентно величине (LU +ui)t . Значение этих величин умножаются в первом и .втором блоках умножения 27 и 28 на величину сигнала, формируемого блоком определения абсолютной величины частоты 20, что позволяет учесть величину момента нагрузки, т.е..получить величины Г sin и Т cosM. Затем . - m ргл ,эти сигналы поступают на третий 30 и четвертый 31 блоки умножения, где осуществляется их умножение На сигнал Е регулятора скорости 17, что приводит к формированию задания токов нагрузки t|5in4 и . Полученные сигналы в блоках суммирования 32 и 33 складываются с сигналами блоков 27 и 28, образуя на выходе сигнал .cosЧ-. iia токв фазе А и сигнал + l cosM - сигнал в фазе В, сдвинутый по фазе на 90° относительно первого. Эти токи статора двух фаз подаются к схеме преобразователя числа фаз 29, которая генерирует сигналы переменного тока Ту, Ту, 1 , задающие соответственно токи в фазах электродвигателя 12. Таким образом, использование изобретения обеспечивает уменьщение тока возбуждения асинхронного электродвигателя в соответствии с уменьшением нагрузки данного электродвигатея. Это гарантирует бесшумную работу асинхронного электродвигателя даже когда он работает под легкой нагрузкой, так как не возникают никакие шумы возбуждения (они образуются, когда асинхронный электродвигатель управляется обычной векторной системой управления). Одновременно снижается потребление энергии и повьшгается ЩЦ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Асинхронный электропривод | 1981 |
|
SU1327806A3 |
| Устройство для управления асинхронным двигателем | 1979 |
|
SU1192641A3 |
| Реверсивный электропривод постоянного тока | 1979 |
|
SU1056930A3 |
| Электропривод переменного тока | 1979 |
|
SU1450765A3 |
| Преобразователь угла поворота вала в код | 1981 |
|
SU1148574A3 |
| Частотно-регулируемый электропривод | 1980 |
|
SU1210676A3 |
| Электропривод постоянного тока | 1979 |
|
SU1102497A3 |
| Устройство для управления асинхронным электродвигателем | 1980 |
|
SU1421270A3 |
| Устройство для останова шпинделя в заданном положении | 1980 |
|
SU1165226A3 |
| Устройство для управления шаговым двигателем | 1974 |
|
SU552913A3 |

ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА, содержащий асинхронный двигатель, многофазный регулируемый источник тока, к выходу которого подключен асинхронный электродвигатель с датчиком скорости на валу, выводы которого соединены с первым входом блока сравнения, второй вход которого соединен с бло-ком задания скорости, а выход блока сравнения через регулятор скорости подсоединен к первому входу координатного преобразователя и входу формирователя частоты тока в роторе, выход которого через Сумматор соединен с входами генераторов опорных сигналов, а выходы генераторов опорных сигналов соединены через первый и второй блоки умножения с опорными входами кЪординатного преобразователя, выходы которого соединены через фазовый преобразователь с входами регулируемого источника тока, а второй вход сумматора соединен с датчиком скорости, о тли чающий с я тем, что, с целью повышения экономичности.и снижения шума при низкой нагрузке двигателя, координатный преобразователь содержит третий и четвертый блоки умножения, два сумматора и блок инвертирования, при этом первые входы сумматора соединены с соответствующими выходами третьего и четвертого блоков умножения, вторые входы соедисл нены с опорными входами координатного преобразователя, выходы их являются выходами координатного преобразователя, первый вход третьего блока умножения через блок инвертирование, а первый вход четвертого блока умножения непосредственно соединены с опорными, в-хоцами координатного преэбразов-ателя, вторые входы третьего и четвертого блоков умножения являютсо ел ся входом координатного преобразовате ля, выход формирователя тока в рото00 ре подключен к вторым входам первого и второго блоков умножения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бродовский В.Н | |||
| и др | |||
| Приводы с частотно-токовым управлением | |||
| М | |||
| , Энергия, 1974, с.135 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод | 1978 |
|
SU782114A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
