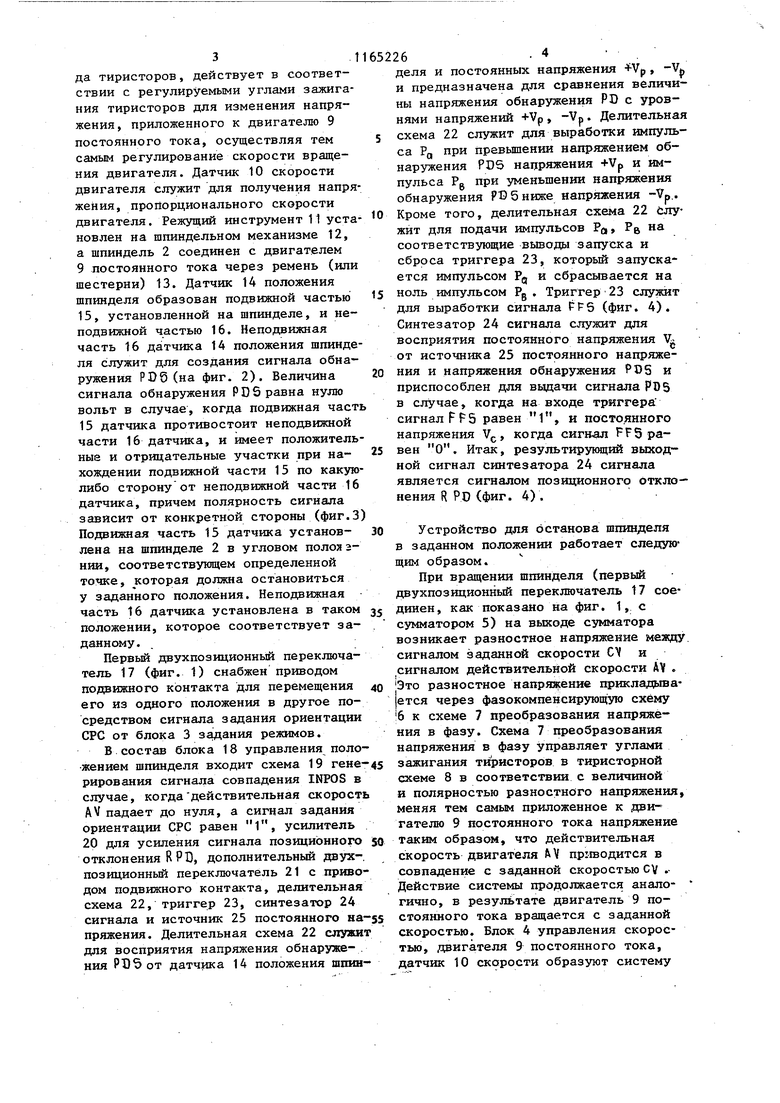
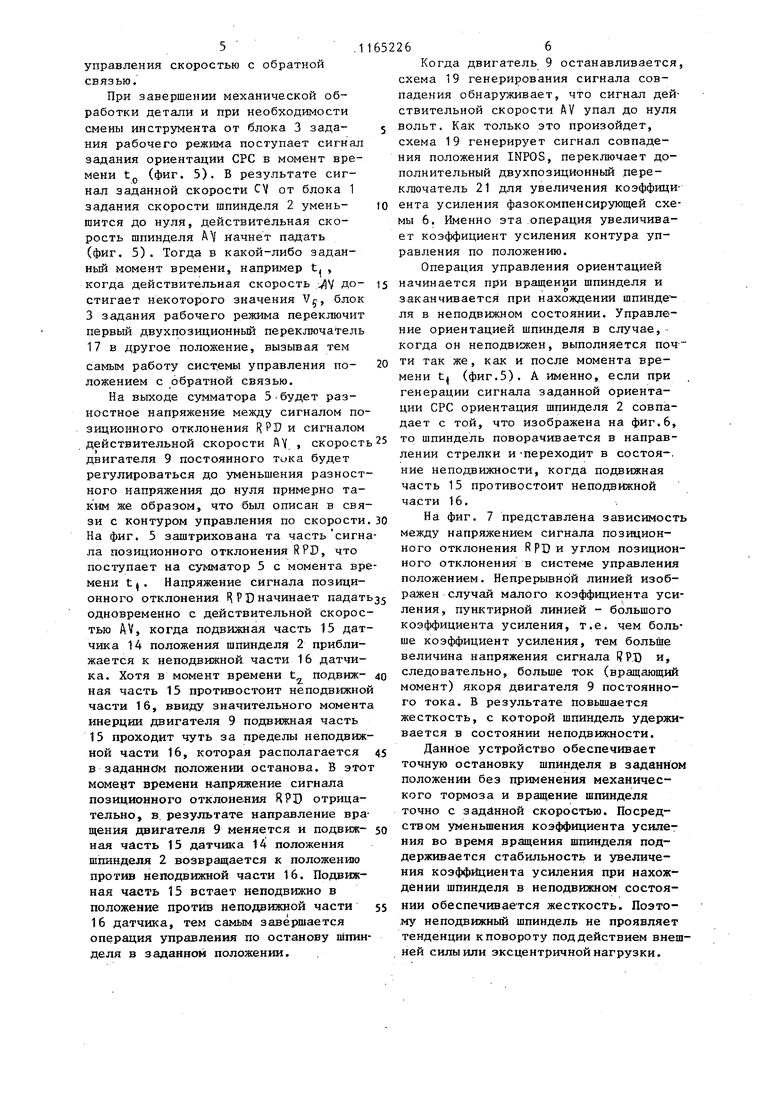
Изобретение относится к области станкостроения, а именно к устройству для останова шпинделя в заданном положении. Известна система управления шпинделем для регулирования скорости вра щения шпинделя и останова его в заданном положении,содержащая датчик скорости шпинделя,цифроаналоговый преобразователь , 3адатчик скорости, блок JCpaвнeния,блoк регулирования скорости шпинделя,синхррнизатор, содержащий импульсный датчик положения шпинделя блок.управления положением шпинделя с цифровым задатчиком, двухпозиционный переключатель и сумматор lj . Однако эта система управления не обеспечивает высокой точности остано ва шпинделя в заданном положении. Цель изобретения - повьш1ение точности останова шпинделя в заданном положении. Указанная цель достигается тем, что в устройстве для останова шпинде ля в заданном положении, содержащем &ПОК задания скорости шпинделя, выход которого соединен с первым двухпозиционным переключателем, имеющим привод подвижного контакта, соединен ный с входом блока управления скорос тью шпинделя, другой вход которого соединен с выходом датчика скорости шпинделя, датчик положения шпинделя, образованный подвижной частью, установленной на шпинделе, и неподвижной частью, выход, которого соединен с входом блока управления положением шпинделя, а выход последнего соедине с первым двухпозиционным переключате лем, и блок задания рабочего режима. выход которого соединен с приводом подвижного контакта первого двухпози ционного переключателя, блок управле ния положением шпинделя содержит делительную схему, триггер, синтезатор сигнала, усилитель, дополнительный двухпозиционный переключатель с приводом подвижного контакта, источники постоянного напряжения и схему генерирования сигнала совпадения, причем выход датчика положения соединен с входом делительной схемы, один из вы ходов которой соединен с вьшодом запуска, триггера, а другой - с выводом сброса триггера выход триггера соединен с одним входом синтезатора, другие входы которого соединены с выходом датчика положения шпинделя и с источником постоянного напряжения, один выход синтезатора сигнала подключен соответственно к неподвижным контактам дополнительного двухпозиционного переключателя через усилитель и непосредственно, а другой - к входу блока задания режимов, подвижный контакт дополнительного двухпозиционного переключателя соединен с неподвижным контактом первого двухпозиционного переключателя, один вход схемы генерирования сигнала совпадения соединен с выходом датчика скорости шпинделя, а второй с блоком задания рабочего режима, при этом выход схемы генерирования сигнала совпадения связан с приводом подвижного контакта дополнительного двухпозиционного переключателя и блоком управления скоростью шпинделя. На фиг. 1 показано устройство для останова шпинделя в заданном положении; на фиг. 2-3 - формы сигналов на выходе из датчика положения шпинделя; на фиг. 4 - форма сигналов в блоке управления положением шпинделя; на фиг. 5 - форма сигналов в устройстве на фиг. 1; на фиг. 6 - расположение деталей устройства при регулировании положений шпинделя; на фиг. 7 - зависимость между напряжением позиционного отклонения и углом позиционного отклонения при переключении коэффициента усиления. Устройство содержит блок 1 задания скчзрости шпинделя 2, вырабатывающий сигнал заданной скорости CV , блок 3 задания рабочего режима, вырабатывающий сигнал заданной ориентации С PC. Блок 4 управления скоростью шпинделя содержит сумматор 5, фазокомпенсирующую схему 6, схему 7 преобразования напряжения в фазу и тиристорную схему 8. Сумматор 5 однозначен для вьщачи разностного напряжения между сигналом заданной скорости CV и сигналом действительной. скорости frV двигателя, фазокомпенсирующая схема 6 осуществляет фазовую компенсацию в сервосистеме посредством опережения или замедления фазы. Схема 7 преобразования напряжения в фазу управляет углом зажигания каждого тиристора в тиристорной схеме 8-в соответствии с отклонением между заданной скоростью CV и действительной скоростью AV . Тиристорная схема 8, состоящая из ряда тиристоров, действует в соответствии с регулируемыми углами зажигания тиристоров для изменения напряжения , приложенного к двигателю 9 постоянного тока, осуществляя тем самым регулирование скорости вращения двигателя. Датчик 10 скорости двигателя служит для получения напряжения, пропорционального скорости двигателя. Режущий инструмент 11 установлен на шпиндельном механизме 12, а шпиндель 2 соединен с двигателем 9 постоянного тока через ремень (или шестерни) 13. Датчик 14 положения шпинделя образован подвижной частью 15, установленной на шпинделе, и неподвижной частью 16. Неподвижная часть 16 датчика 14 положения шпинделя служит для создания сигнала обнаружения Р05 (на фиг. 2). Величина сигнала обнаружения PD5 равна нулю вольт в случае, когда подвижная часть 15 датчика противостоит неподвижной части 16 датчика, и имеет положительные и отрицательные участки при нахождении подвижной части 15 по какуюлибо сторону от неподвижной части 16 датчика, причем полярность сигнала зависит от конкретной стороны (фиг.3) Подвижная часть 15 датчика установлена на шпинделе 2 в угловом полол энии, соответствующем определенной точке, которая должна остановиться у заданного положения. Неподвижная часть 16 датчика установлена в таком положении, которое соответствует заданному.
Первьй двухпозиционный переключатель 17 (фиг. 1) снабжен приводом подвижного контакта для перемещения его из одного положения в другое посредством сигнала задания ориентации СРС от блока 3 задания режимов.
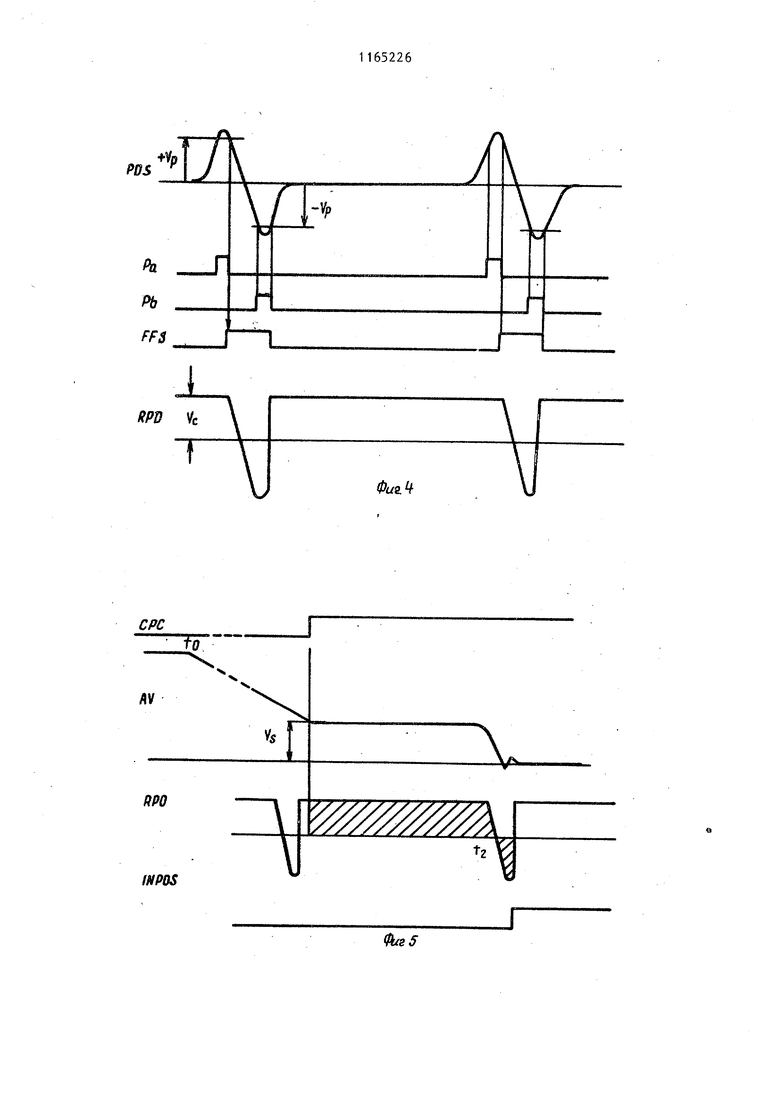
В состав блока 18 управления положением шпинделя входит схема 19 генерирования сигнала совпадения INPOS в случае, когдадействительная скорость AV падает до нуля, а сигнал задания ориентации СРС равен 1, усилитель 20 для усиления сигнала позиционного отклоненияRPD, дополнительный двухпозиционный переключатель 21 с приводом подвижного контакта, делительная схема 22, триггер 23, синтезатор 24 сигнала и источник 25 постоянного напряжения. Делительная схема 22 служит для восприятия напряжения обнаруже- . ния PD5 от датчика 14 положения шпинделя и постоянных напряжения +Vp, -V и предназначена для сравнения величины напряжения обнаружения PD с уровнями напряжений +Vp, -Vp. Делительна схема 22 служит для выработки импульса Рд при превышении напряжением обнаружения PD5 напряжения +Vp и импульса Pg при уменьшении напряжения обнаружения РТЭ 5 ниже напряжения -Vp,. Кроме того, делительная схема 22 служит для подачи импульсов Р, Pg на соответствующие выводы запуска и сброса триггера 23, который запускается импульсом Рд и сбрасывается на ноль импульсом Рд. Триггер 23 служит для выработки сигнала FP5 (фиг. 4). Синтезатор 24 сигнала служит для восприятия постоянного напряжения V. от источника 25 постоянного напряжения и напряжения обнаружения POS и приспособлен для вьщачи сигнала POS в случае, когда на входе триггера сигнал равен 1, и постоянного напряжения V, когда сигнал FF5 равен О. Итак, результирующий выходной сигнал синтезатора 24 сигнала является сигналом позиционного отклонения R PD (фиг. 4) .
Устройство для останова шпинделя в заданном положении работает следующим образом.
При вращении шпинделя (первый двухпозиционный переключатель 17 соединен, как показано на фиг. 1, с сумматором 5) на выходе сумматора возникает разностное напряжение между сигналом заданной скорости CV и сигналом действительной скорости AV . Это разностное напряжение прикладьтается через фазокомпенсирующую схему 6 к схеме 7 преобразования напряжения в фазу. Схема 7 преобразования напряжения в фазу управляет углами зажигания ти ристоров в тиристорной схеме 8 в соответствии с величиной и полярностью разностного напряжения, меняя тем самым приложенное к двигателю 9 постоянного тока напряжение таким образом, что действительная скорость двигателя ftV пр:гоодится в совпадение с заданной скоростью CV . Действие системы продолжается аналогично, в результате двигатель 9 постоянного тока вращается с заданной скоростью. Блок 4 управления скоростью, двигателя 9 постоянного тока, датчик 10 скорости образуют систему
управления скоростью с обратной связью.
При завершении механической обработки детали и при необходимости смены инструмента от блока 3 задания рабочего режима поступает сигнал задания ориентации СРС в момент времени tjj (фиг. 5). В результате сигнал заданной скорости CV от блока 1 задания скорости шпинделя 2 уменьшится до нуля, действительная скорость шпинделя AV начнет пад-ать (фиг. 5). Тогда в какой-либо заданный момент времени, например t , когда действительная скорость .v5V Достигает некоторого значения V, блок 3 задания рабочего режима переключит первый двухпозиционньй переключатель 17 в другое положение, вызывая тем самым работу управления положением с обратной связью.
На выходе сумматора 5будет разностное напряжение между сигналом позиционного отклонения RPr и сигналом действительной скорости AV , скорость двигателя 9 постоянного тика будет регулироваться до уменьшения разностного напряжения до нуля примерно таким же образом, что был описан в связи с контуром управления по скорости. На фиг. 5 заштрихована та часть сигнала позиционного отклонения RPD, что поступает на сумматор 5 с момента времени tj. Напряжение сигнала позиционного отклонения HPDначинает падать одновременно с действительной скоростью AV, когда подвижная часть 15 датчика 14 положения шпинделя 2 приближается к неподвижной части 16 датчика. Хотя в момент времени t подвижная часть 15 противостоит неподвижной части 16, ввиду значительного момента инерции двигателя 9 подвижная часть
15проходит чуть за пределы неподвижной части 16, которая располагается в заданном положении останова. В этот момеут времени напряжение сигнала позиционного отклонения RPD отрицательно, в. результате направление вращения двигателя 9 меняется и подвижная чисть 15 датчика 1 положения шпинделя 2 возвращается к положению против неподвижной части 16. Подвижная часть 15 встает неподвижно в положение против неподвижной части
16датчика, тем самым завершается операция управления по останову шпинделя в заданном положении.
Когда двигатель 9 останавливается схема 19 генерирования сигнала совпадения обнаруживает, что сигнал действительной скорости AV упал до нуля вольт. Как только это произойдет, схема 19 генерирует сигнал совпадения положения INPOS, переключает дополнительный двухпозиционньй переключатель 21 для увеличения коэффициента усиления фазокомпенсирующей схемы 6. Именно эта операция увеличивает коэффициент усиления контура управления по положению.
Операция управления ориентацией начинается при вращении шпинделя и заканчивается при нахождении шпинделя в неподвижном состоянии. Управление ориентацией шпинделя в случае, когда он неподвижен, выполняется почти так же, как и после момента времени t (фиг.5). А именно, если при генерации сигнала заданной ориентации СРС ориентация шпинделя 2 совпадает с той, что изображена на фиг.6, то шпиндель поворачивается в направлении стрелки и -переходит в состоя-. ние неподвижности, когда подвижная часть 15 противостоит неподвижной части 16.
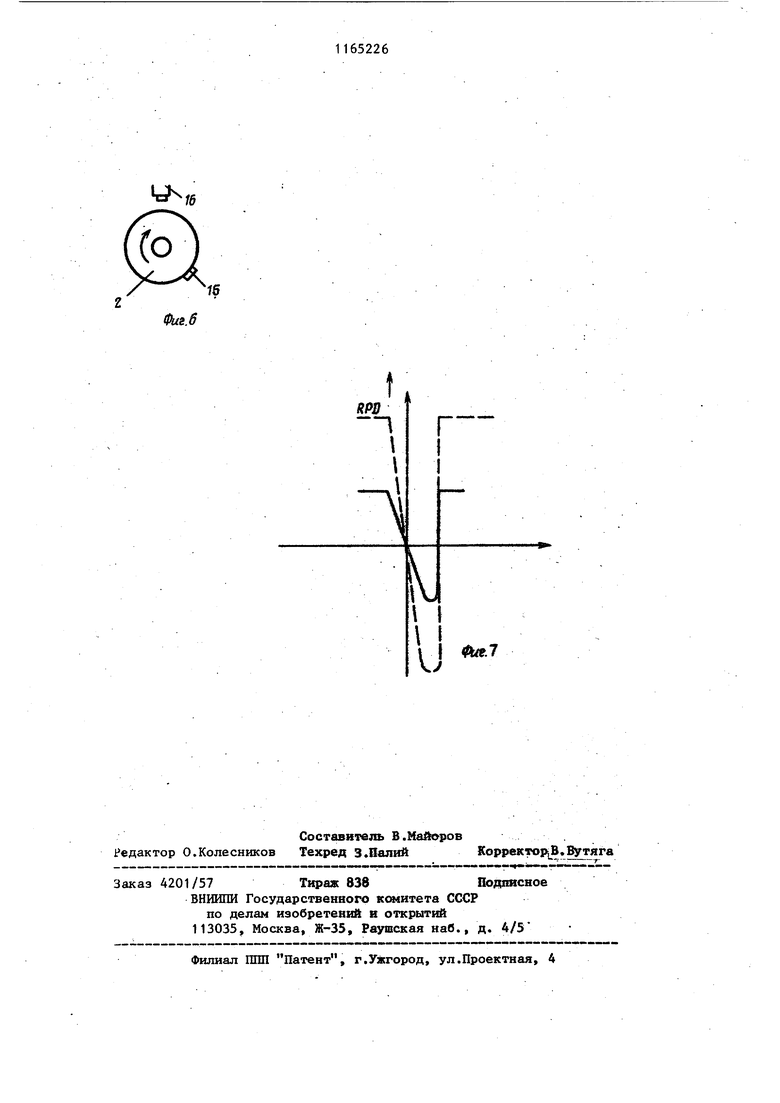
На фиг. 7 представлена зависимост между напряжением сигнала поз1щионного отклонения RPD и углом позиционного отклонения в системе управления положением. Непрерывной линией изображен случай малого коэффициента усиления, пунктирной линией - большого коэффициента усиления, т.е. чем больше коэффициент усиления, тем больше величина напряжения сигнала RP.B и, следовательно, больше ток (вращающий момент) якоря двигателя 9 постоянного тока. В результате повьшается жесткость, с которой шпиндель удерживается в состоянии неподвижности.
Данное устройство обеспечивает точную остановку шпинделя в заданно положении без применения механического тормоза и вращение шпинделя точно с заданной скоростью. Посредством уменьшения коэффициента усиления во время вращения шпинделя поддерживается стабильность и увеличения коэффициента усиления при нахождении шпинделя в неподвижном состоянии обеспечивается жесткость. Поэтому неподвижный шпиндель не проявляет тенденции к повороту под действием внешней силы или эксцентричной нагрузки.
17
.
Фиг ч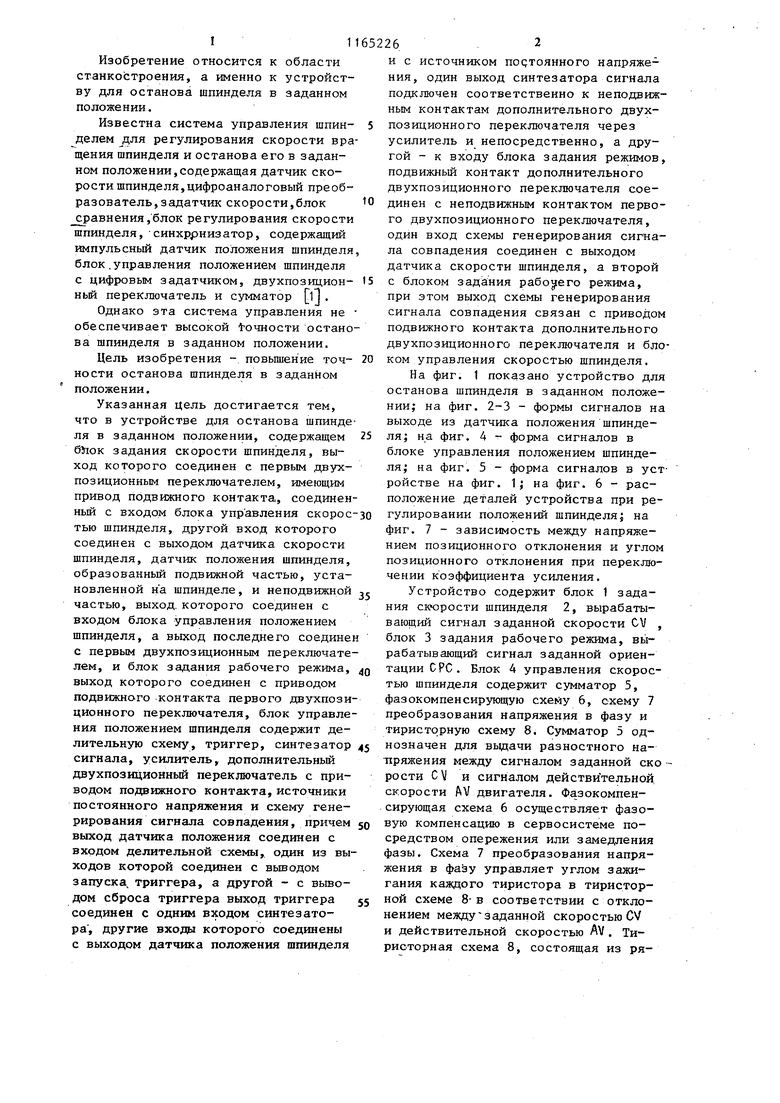
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления остановом шпинделя в заданном положении | 1980 |
|
SU1175357A3 |
| Устройство для остановки шпинделя в заданном положении | 1980 |
|
SU1148555A3 |
| Система управления для остановки шпинделя в определенном угловом положении | 1980 |
|
SU1308185A3 |
| Устройство управления ориентацией шпинделя | 1981 |
|
SU1258316A3 |
| Система управления шпинделем | 1978 |
|
SU724081A3 |
| Асинхронный электропривод | 1981 |
|
SU1327806A3 |
| Устройство для управления асинхронным двигателем | 1979 |
|
SU1192641A3 |
| Электропривод переменного тока | 1979 |
|
SU1450765A3 |
| Электропривод переменного тока | 1980 |
|
SU1114358A3 |
| Система управления шпинделем | 1978 |
|
SU831060A3 |
УСТРОЙСТВО ДЛЯ ОСТАНОВА ШПИНДЕЛЯ В ЗАДАННОМ ПОЛОЖЕНИИ, содержащее блок задания скорости шпинделя, выход которого соединен с первым двухпозиционным переключателем, имеющш привод подвижного контакта, соединенный с входом блока управленця- скоростью шпинделя, другой вход которого соединен с выходом датчика скорости шпинделя, датчик положения . шпинделя, образованный подвижной частью, установленной на шшшде:ю, и неподвижной частью, выход которого соединен с входом блока управления положением шпинделя, а выход последнего соединен с первьм двухпозиционным переключателем, и блок задания рабочего режима, выход которого соединен с приводом подвижного контакта первого двухпозиционного переключателя , отличающее тем, что, с целью повышения точности управления, .блок управления положением шпинделя содержит делительную схему, триггер, синтезатор сигнала, усилитель, дополнительный двухпозиционный переключатель с приводом подвижного контакта, источник постоянного напряжения и схему генерирования сигнала совпадения, причем выход датчика положения соединен с входом делительной схемы, один из выходов которой соединен с вьшодом запуска триггера, а другой - с выводом сброса триггера f выход триггера соединен с одним входом синтезатора сигнала, другие входы которого соединены с выходом датчика положения шпинделя и с ирточником постоянного напряжения, один (Л выход синтезатора сигнала подключен соответственно к неподвижньм контактам дополнительного двухпозиционнрго переключателя через усилитель и непосредственно, а другой - к входу блока задания режимов, подвижный контакт дополнительного двухпозиционноЭ) го переклю.чателя соединен с неподвиж ным контактом первого двухпозиционсо f ного переключателя, один вход citeMbi генерирования сигнала совпадения соединен с выходом датчика скорости шпинделя, а второй - с блоком задания рабочего, режима, при этом выход схемы генерирования сигнала совпадения связан с приводом,подвижного кон такта дополнительного двухпозиционного ;переклю.чателя и блоком управления скоростью Ш1шнделя.
PPO
tMPOS
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система управления шпинделем | 1978 |
|
SU724081A3 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
