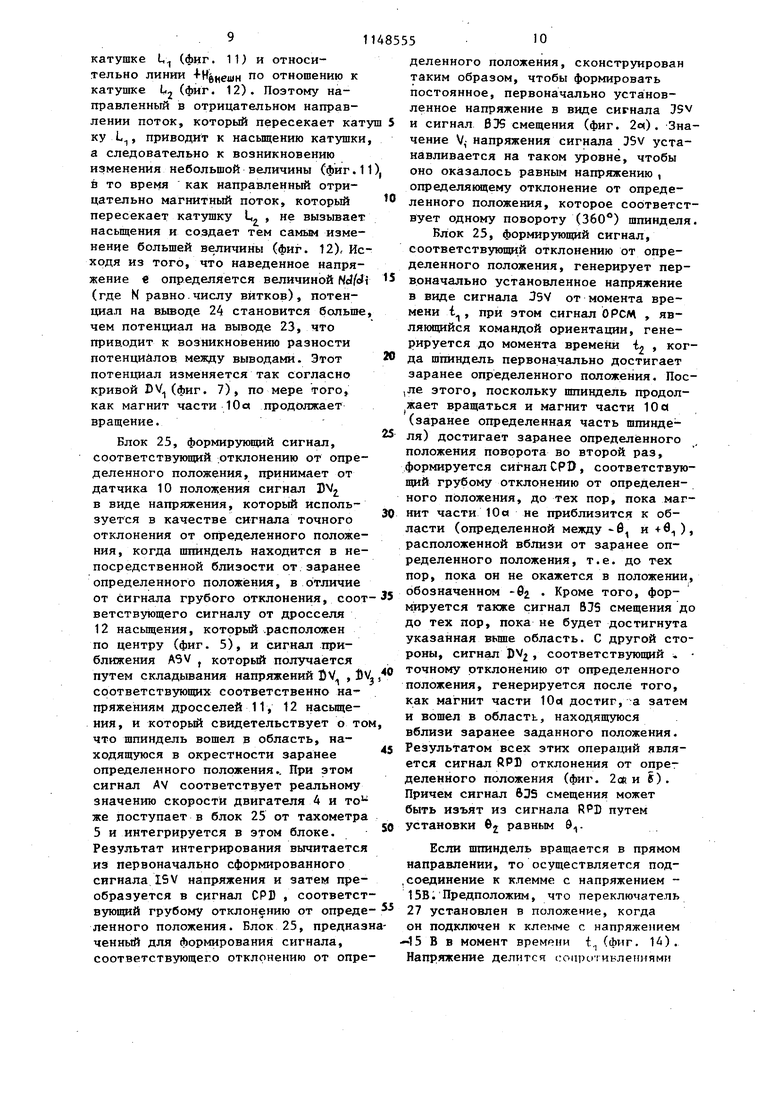
Изобретение относится к системам управления обрабатывающими станками, а именно к устройствам управления, предназначенными для остановки шпинделя в заданном положении Известно устройство для остановки шпинделя в заданном положении, содержащее блок задания скорости шпинделя, выход которого соединен со снабженным приводом переключателем режимов работы устройства, соед ненным с Входом блока регулирования скорости шпинделя, другой вход кото рого связан с вькодом датчика скорости шпинделя, датчик положения шпинделя, вьтолненный в виде подвижной, расположенной на шпинделе, и неподвижной частей, выход которого соединен с. входом блока управления ориентацией, при этом вход посл него соединен с переключателем режи мов работы устройства, и блок задания режимоз работы устройства, выход которого связан с привддом пере ключателя режимов работы устройства 111. . Однако известное устройство не обеспечивает фиксирующего усилия на шпинделе в момент достижения им заданного положения, что снижает точность позиционирования шпинделя. Цель изобретения - повьшгение точ ности позиционирования шпинделя. Поставленная цель достигается тем, что в устройстве для остановки шпинделя в заданном положении, содержащем датчик положения шпинделя, выполненный из дв5гх .частей: подйижной - расположенной на шпинделе, и неподвижной, nejpвключатели режимов работы, блок управления скор-остью, соединенный с датчиком скорости, и блок управления ориентацией шпиндел последний выполнен в виде интеграто ра, вход которого соединен с выхрдом датчика скорости, переключателе с приводами, синтезатора сигнала, входы которого соединены с выходом интегратора и неподвижной частью датчика положения шпинделя через переключатели, и связанных с привод ми переключателей, формирователя си нала, соединенного с неподвижной частью датчика, и элементов сравнения, при этом блок зшравления ориен тацией через переключатели режимов работы соединен с блоком управления скоростью, а подвижная часть датчика выполнена в виде постоянного магнита, полюса которого расположены вдоль направления вращения шпинделя, неподвижная - в виде чувствительных элементов, расположенных в одной плоскости с постоянным магнитом. Кроме того, каждый из чувствительных элементов датчика положения шпинделя выполнен в виде дросселя насьпцения с двумя катушками, намотанными встречно и соединенными между собой одними концами с обр.а1зоваиием общего вывода, генератора импульсов, соединенного с общим выводом, к однополупериодных выпрямителей, соединенных с другими концами катушек. На фиг. 1 показана блок-схема устройст а; на фиг. 2 - различные формы импульсов, полученных при работе блок-схемы; на фиг. 3 - датчик положения шпинделя; на фиг. 4 - вид А на фиг. 3; на фиг. 5 - конструктивное выполнение и взаимное расположение подвижной и неподвижной частей датчика положения шпинделя; на фиг.6чувствительный элемент неподвижной части-,, на фиг. 7 - временные зависимости напряжений, получаемых от каждого из дросселей; на фиг. 8 электрическая схема дросселя насыщения; на фиг. 9 - 12 - высокочастотный импульсный сигнал при различном воздействии внешнего магнитного поля на дроссель насьш1ения, на фиг. 13 - блок управления ориентацией шпинделя , на фиг. 14 - времен- ная диаграмма работы блока управления ориентацией шпинделя. Устройство содержит блок 1 задания скорости, служащий для генерирования сигналов, зависящих от скорости, блок 2 задания режимов работы для фор1 рования сигнала, соответствующего определенной ориентации шпинделя, блок 3 управления скоростью, включающий сумматор ., схему 35 фаз.оврй компенсации,преобразователь 3 в напряжения в фазу и тирйсторую схему 3г. Сумматор Зй предназначен для приема разности напряжений (соответствующей отклонению от значения скорости), возникающей между значением задаваемой скорости CV и реальным значением скорости АУ в ходе операции по управлению значением скорости, и для того, чтобы принимать разность напряжений между сигналом RPD, соответствующим
3
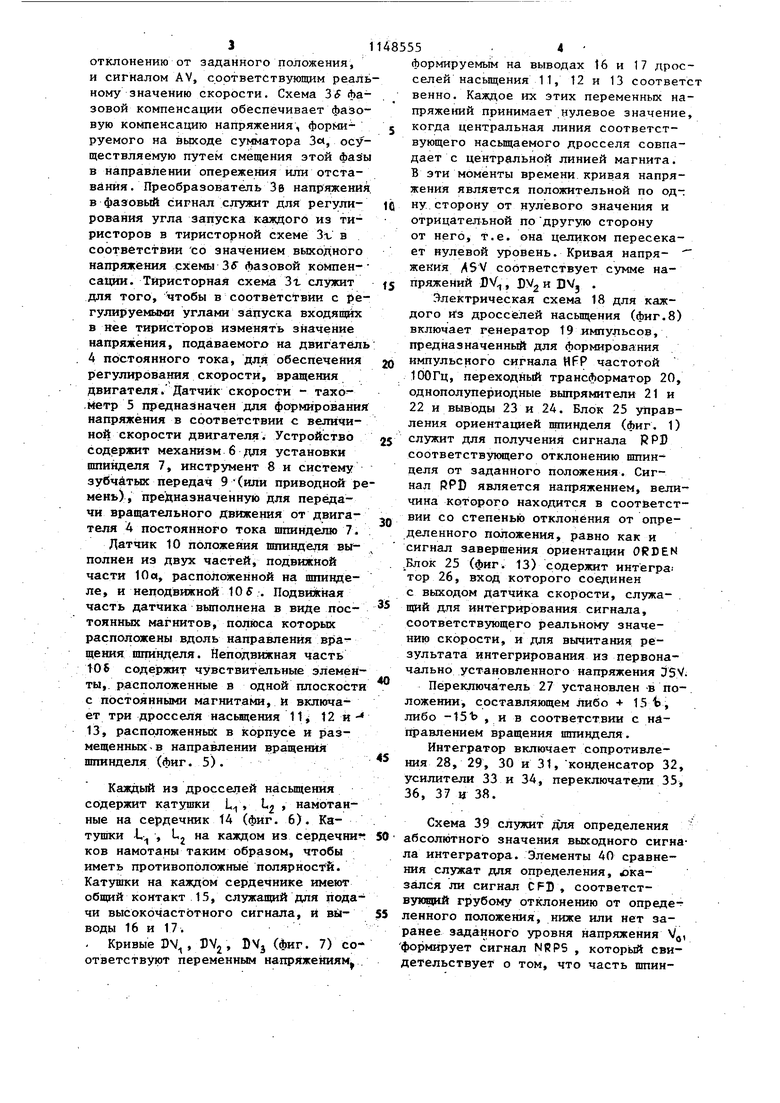
отклонению от заданного положения, и сигналом AV, соответствующим реальному значению скорости. Схема 3S фазовой компенсации обеспечивает фазовую компенсацию напряжения, форМируемого на выходе сумматора 3«, осу ществляёмую путем смещения этой фаз1Ы в направлении опережения или отставания . Преобразователь Зв напряжения в фазовый сигнал служит для регулирования угла запуска каждого из тиристоров в тиристорной схеме 3i, в соответствии со значением выходного напряжения схемы 35 фазовой компенсащш. Тйристорная схема 3г служит для того, чтобы в соответствии с регулируемыми углами запуска входящих в нее тиристоров изменять значение напряжения, подаваемого на двигатель 4 постоянного тока, дли обеспечения регулирования скорости, вращения двигателя.Датчик скорости - тахо .йетр 5 предназначен для формирования напряжения в соответствии с величиной скорости двигателя. Устройство содержит механизм 6 для установки шпинделя 7, инструмент 8 и систему зубчатых передач 9(или приводной ремень), предназначенную для передачи вращательного движения от двигателя 4 постоянного тока шпинделю 7.
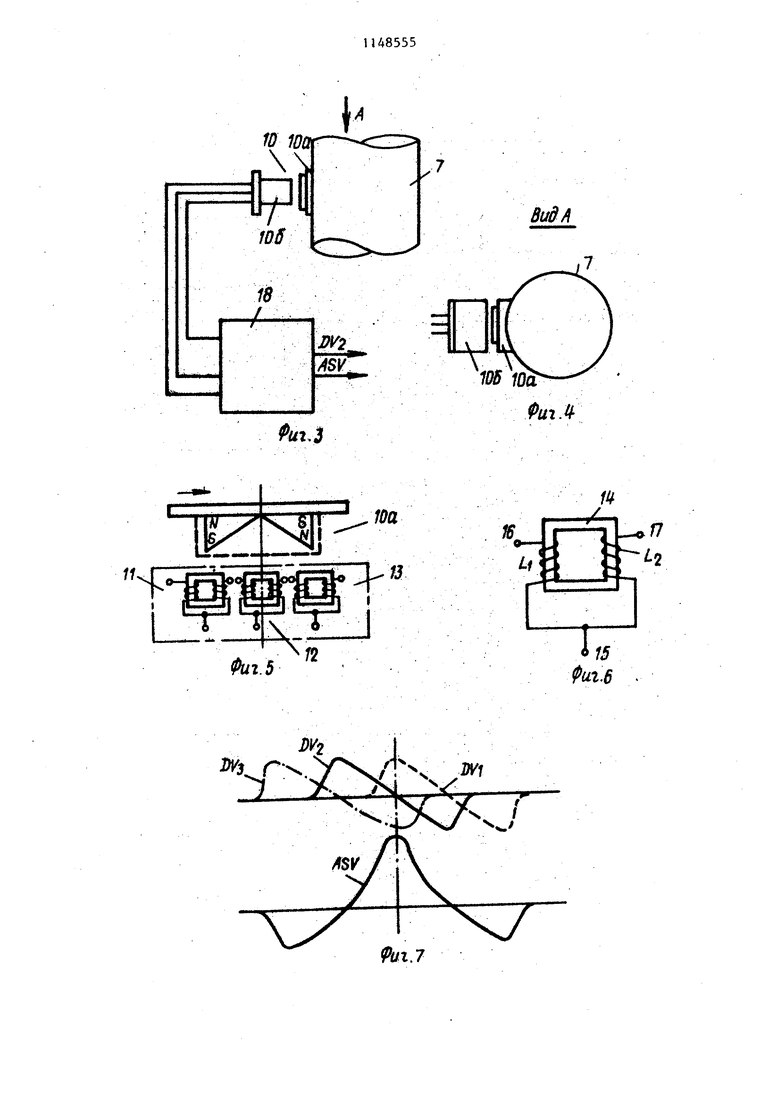
Датчик 1О положения шпинделя выполнен из двух частей, подвижной части 10а, расположенной на шпинделе, и неподвижной 105 . Подвижная часть датчика выполнена в виде постоянных магнитов, полюса которых расположены вдоль направления вращения шпинделя. Неподвижная часть 106 содержит чувствительные элементы,, расположенные в одной плоскости с постоянными магнитами, и включает три дросселя насыщения 11 12 и - 13, расположенных в корпусе и размещенных в направлении вращения шпинделя (фиг. 5).
Каждый из дросселей насыщения содержит катушки Ц Ц намотанные на сердечник tA (фиг. 6). Катушки Iv, , Uj на каждом из сердечниг ков намотаны таким образом, чтобы иметь противоположные полярности. Катушки на каждом сердечнике имеют общий контакт 15, служащий для подачи высокочастотного сигнала, и выводы 16 и 17.
- Кривые DV , DVj, DVj (фиг. 7) соответствуют переменным напряжениям
48555 4
формируемым на выводах 16 и 17 дросселей нacьш eния 1 1 , 12 и 13 соответст венно. Каждое их этих переменных напряжений принимает нулевое значение,
5 когда центральная линия соответствующего насьщаемого дросселя совпадает с центральной линией магнита. В эти моменты времени кривая напряжения является положительной по од1С ну сторону от нулевого значения и отрицател-ьной по другую сторону от него, т.е. она целиком пересекает нулевой уровень. Кривая напря- жекия SV соответствует сумме напряжений DV , ВУ и DVj .
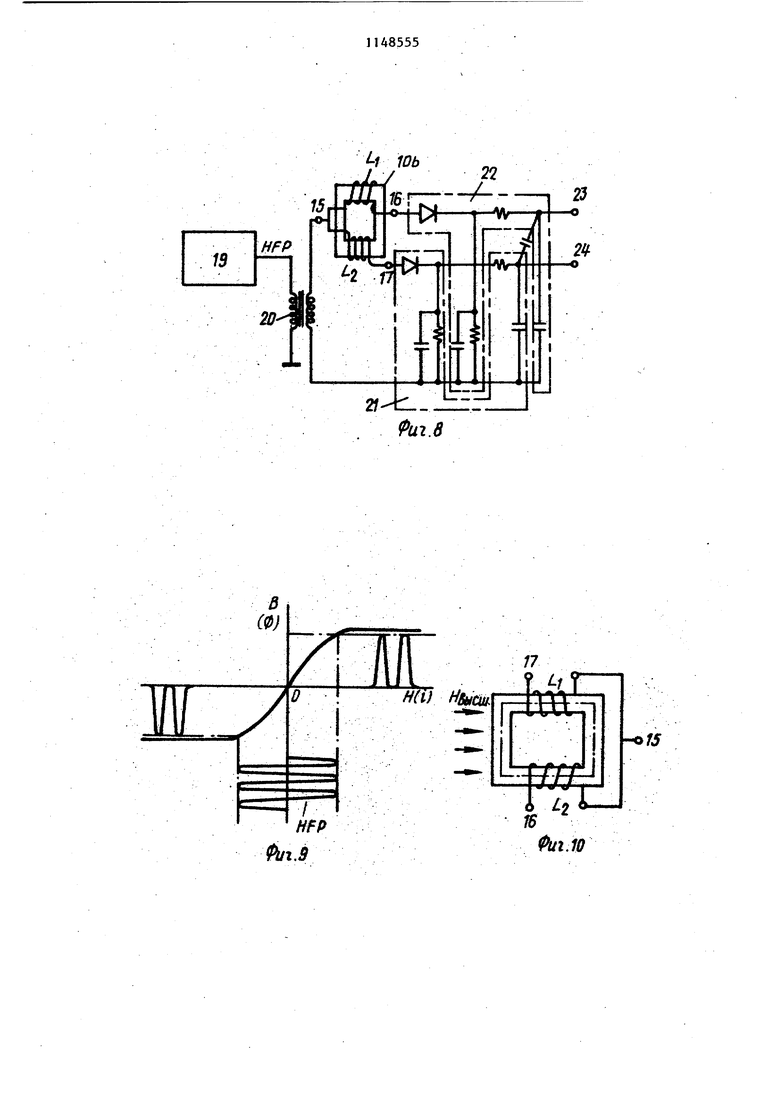
Электрическая схема 18 для каждого из дросс елей нacьш eния (фиг.8) включает генератор 19 импульсов, предназначенный для формирования
20 импульсного сигнала HFP частотой 100Гц, переходный трансформатор 20, однополупериодные выпрямители 21 и 22 и выводы 23 и 24. Блок 25 управления ориентацией щпинделя (фиг. 1)
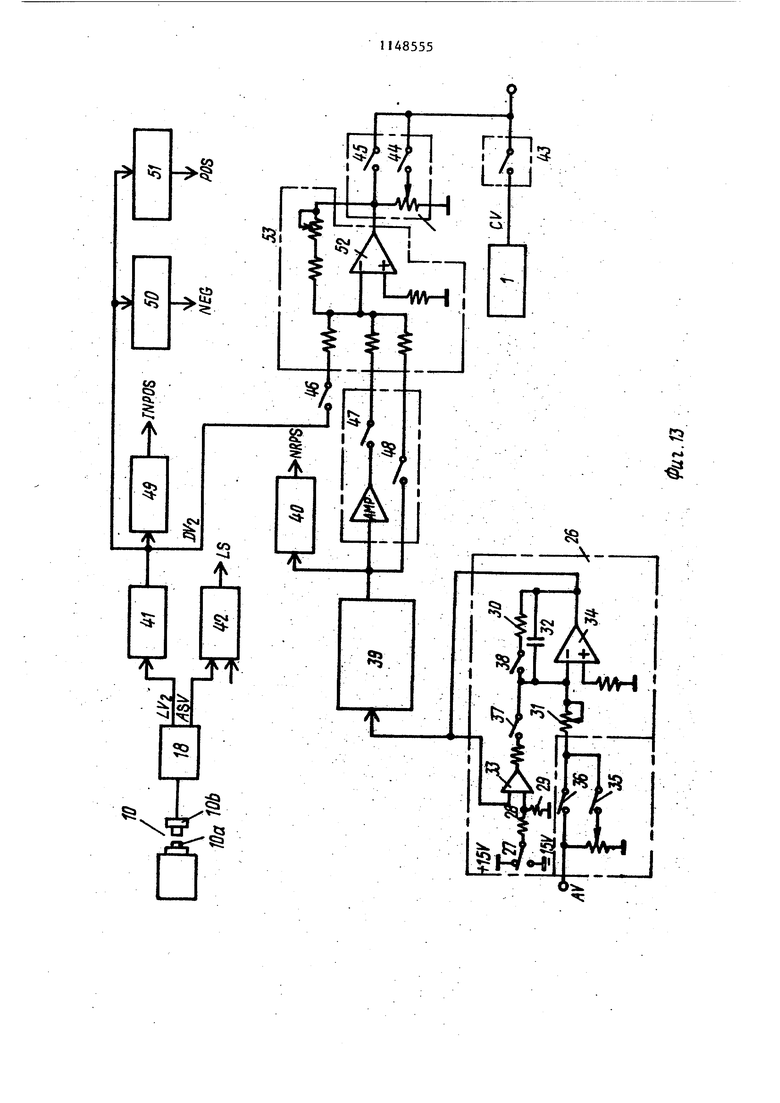
25 служит для получения сигнала RPD соответствующего отклонению шпинделя от заданного полснкения. Сигнал RPD является напряжением, величина которого находится в соответст,- ВИИ со степенью отклонения от определенного положения, равно как и сигнал завершения ориентации ORDEN .Блок 25 (фиг. 13) содержит интегра.тор 26, вход которого соединен с выходом датчика скорости, служащий для интегрирования сигнала, соответствующего реальному значению скорости, и для вычитания результата интегрирования из первоначально установленного напряжения JSV. Переключатель 27 установлен -в положении, составляющем либо -i- 15 t, либо -151 , и в соответствии с направлением вращения шпинделя.
Интегратор включает сопротивле 5 ния 28, 29, 30 и 31, конденсатор 32, усилители 33 и 34, переключатели 35, 36, 37 и 38.
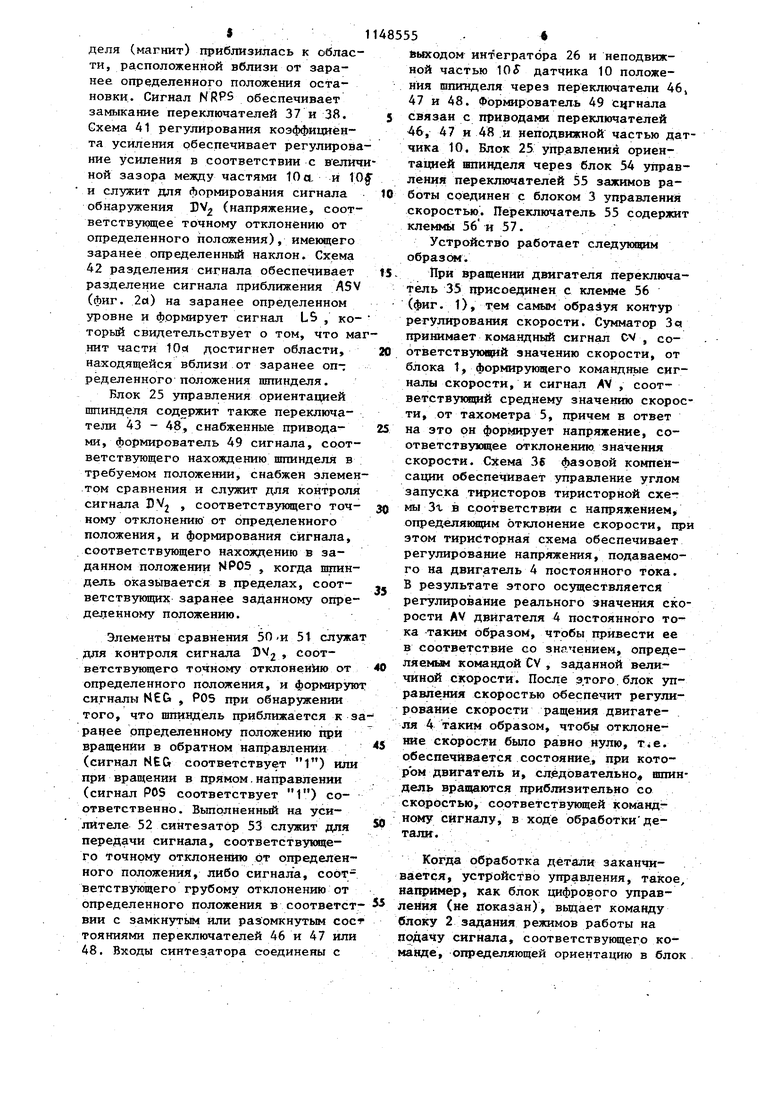
Схема 39 служит для определения 50 абсолютного значения выходного сигнала интегратора. Элементы 40 сравнения служат для определения, юказался ли сигнал СРВ , соответствзпо&щй грубому отклонению от определенного положения, ниже или нет заранее заданного уровня напряжения V, формирует сигнал NRPS , который свидетельствует о том, что часть шпинделя (магнит) приблизилась к области, расположенной вблизи от заранее определенного положения остановки. Сигнал NRPS обеспечивает замыкание переключателей 37 и 38. Схема 41 регулирования коэффициента усиления обеспечивает регулирование усиления в соответствии с величиной зазора между частями 10 а и 10 и служит для формирования сигнала обнарзжения DV (напряжение, соответствуияцее точному отклонению от определенного положения), имеющего заранее определенный наклон. Схема 42 разделения сигнала обеспечивает разделение сигнала приблгшения ASV (фиг. 2а) на заранее определенном уровне и формирует сигнал L5 , который свидетельствует о том, что магнит части 10р( достигнет области, находящейся вблизи от заранее определенного положения шпинделя.
Блок 25 управления ориентагщей шпинделя содержит также переключатели 43 - 48, снабженные приводами, формирователь 49 сигнала, соответствзтощего нахождению шпинделя в требуемом положении, снабжен злементом сравнения и служит для контроля сигнала HV , соответствутащего точному отклонению от определенного положения, и формирования сигнала, соответствующего нахождению в заданном положении ЫР05 , когда шпиндель оказывается в пределах, соответствующих заранее заданному определенному положению.
Элементы сравнения 50-и 51 служат для контроля сигнала DV2 , соответствующего точному отклонению от определенного положения, и формируют сигналы N€Ca , Р05 при обнаружении того, что шпиндель приближается к зарацее определенному положению при вращении в обратном направлении (сигнал ЫЕЬ соответствует 1) или при вращении в прямом.направлении (сигнал POS соответствует 1) соответственно . Выполненный на усилителе 52 синтезатор 53 слз/жит для передачи сигнала, соответствующего точному отклонению от определенного положения, либо сигнала, соответствующего грубому отклонению от определенного положения в соответстВИИ с замкнутым или разомкнутым сост тояннями переключателей 46 и 47 или 48. Входы синтезатора соединены с
В№содом интегратора 26 и неподвижной частью 105 датчика 10 положения шпинделя через переключатели 46i 47 и 48. Форьтровател-ь 49 сцгнала связан с приводами переключателей 46, 47 и 48 .и неподвижной частью датчика 10. Блок 25 управления ориентацией шпивделя через блок 54 управления; переключателей 55 зажимов работы соединен с блоком 3 управления скоростью. Переключатель 55 содерлмт клеммы 56 и 57.
Устройство работает следую1дам образе.
При вращении двигателя переключатель 35 присоединен с клемме 56 (фиг. 1), тем самым образуя контур регулирования скорости. Сумматор принимает командный сигнал CV , соответствующий значению скорости, от блока 1, формирующего командные сигналы скорости, и сигнал V , COOTветствуюир1й среднему значению скорости, от тахометра 5, причем в ответ на зто он формирует напряжение, соответствукяцее отклонению значения скорости. Схема 36 фазовой коьтенсации обеспечивает управление углом запуска тиристоров тиристорной схекйл Зг в соответствии с напряжением, определяющим отклонение скорости, щ зтом тиристорная схема обеспечивает регулирование напряжения, подаваемого на двигатель 4 постоянного тока. В результате зтого осуществляется регулирование реального значения скорости AV двигателя 4 постоянного тока таким образом, чтобы привести ее в соответствие со значением, определяемь командой CV , заданной величиной скорости. После этого.блок управления скоростью обеспечит регулирование скорости ращения двигателя 4 таким образом, чтобы отклонение скорости было равно нулю, . обеспечивается состояние, при котором двигатель и, следовательно, шпиндель вращаются приблизительно со скоростью, соответствующей командному сигналу, в ходе обработкидетали.
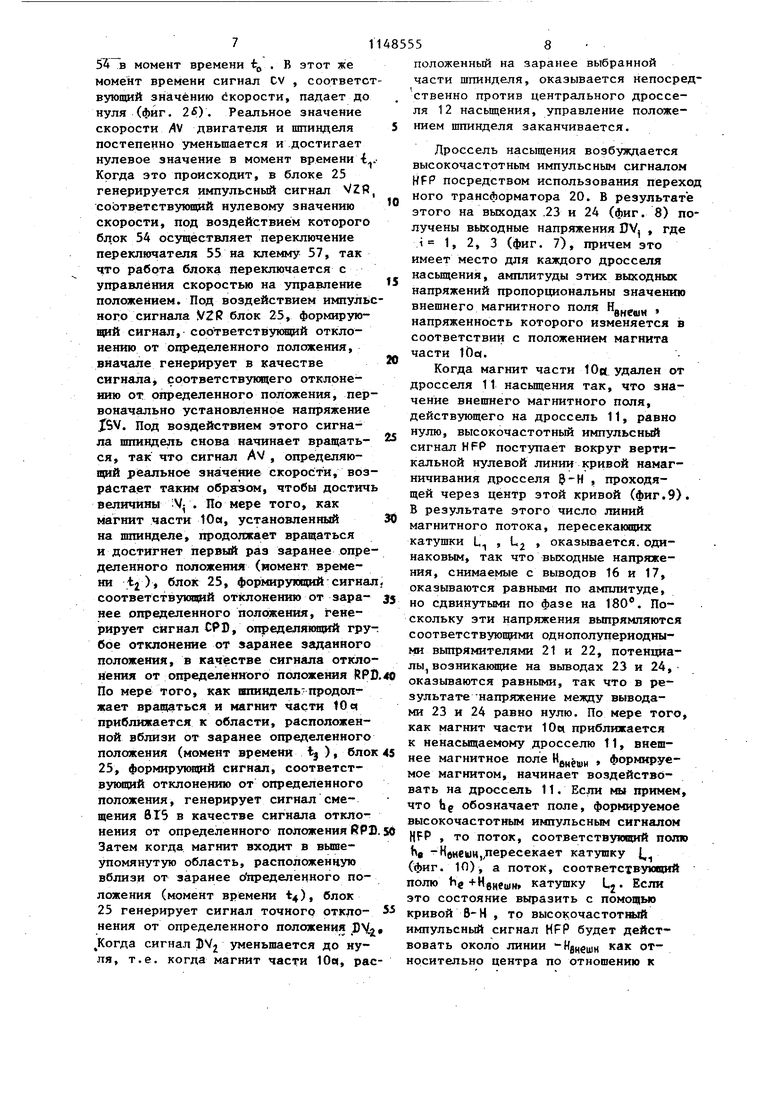
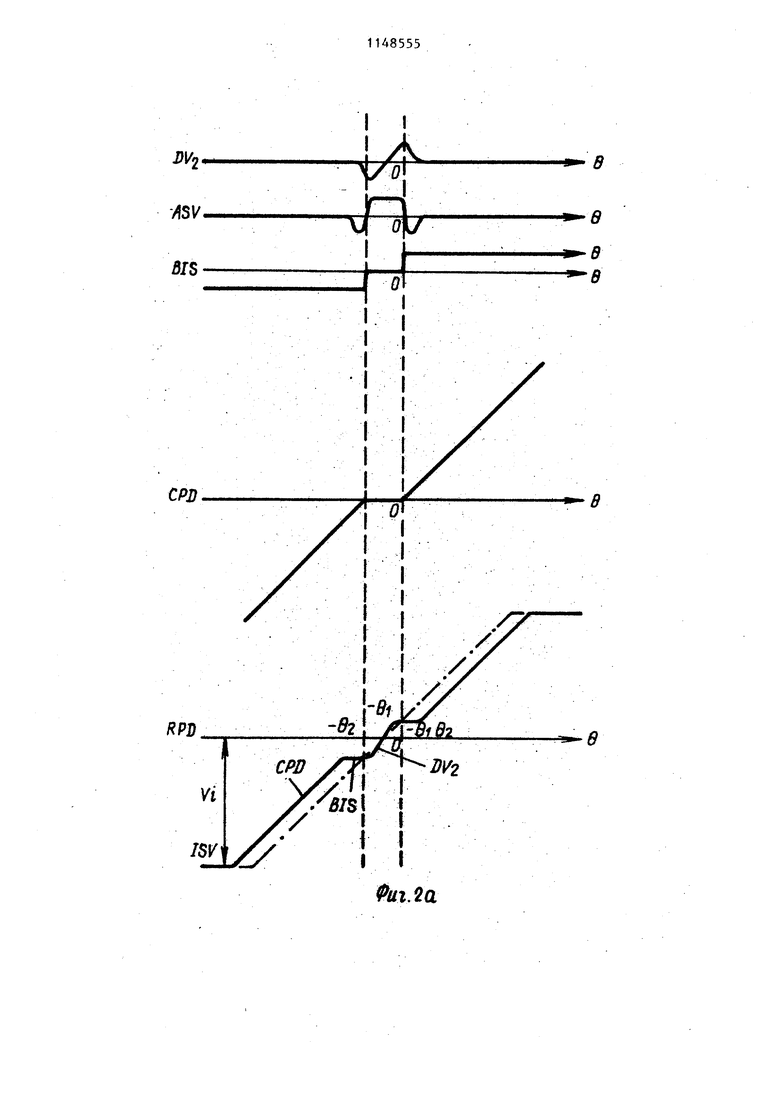
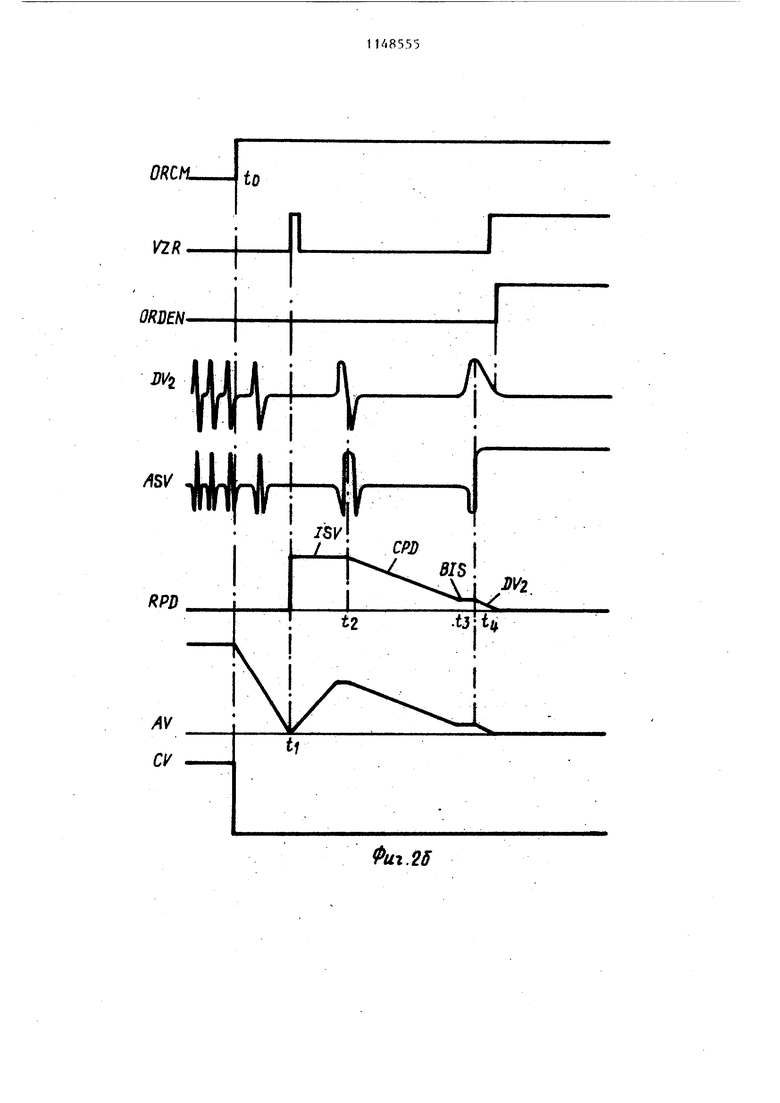
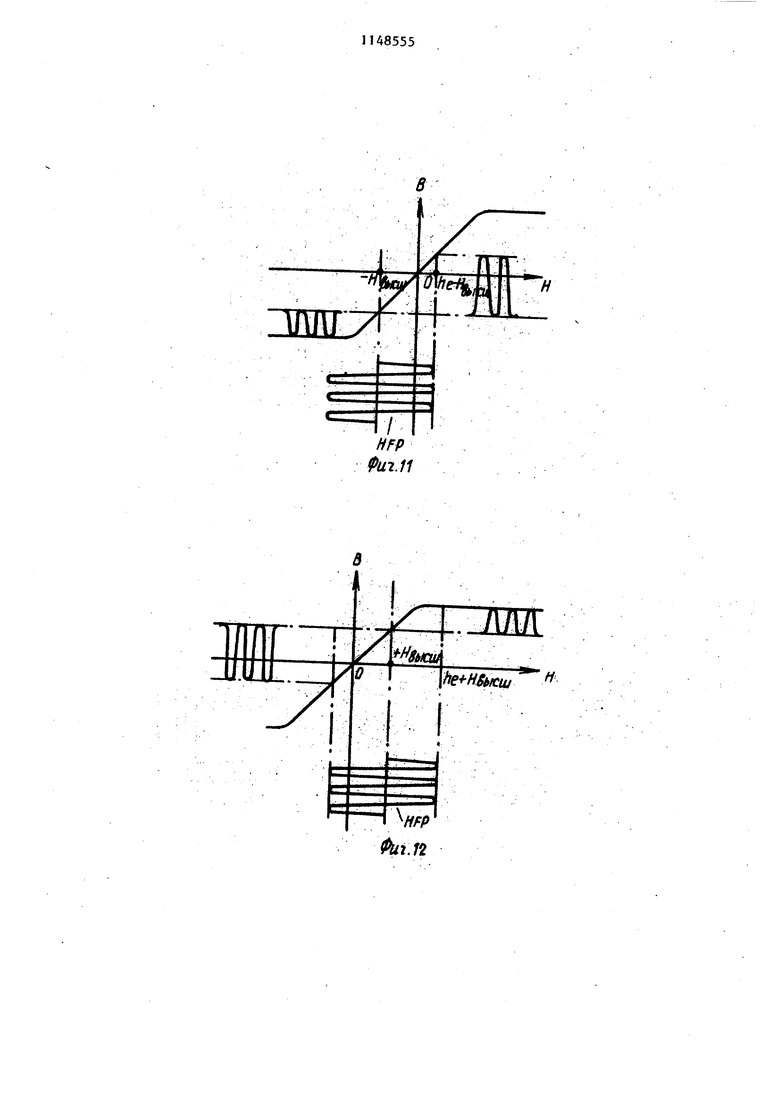
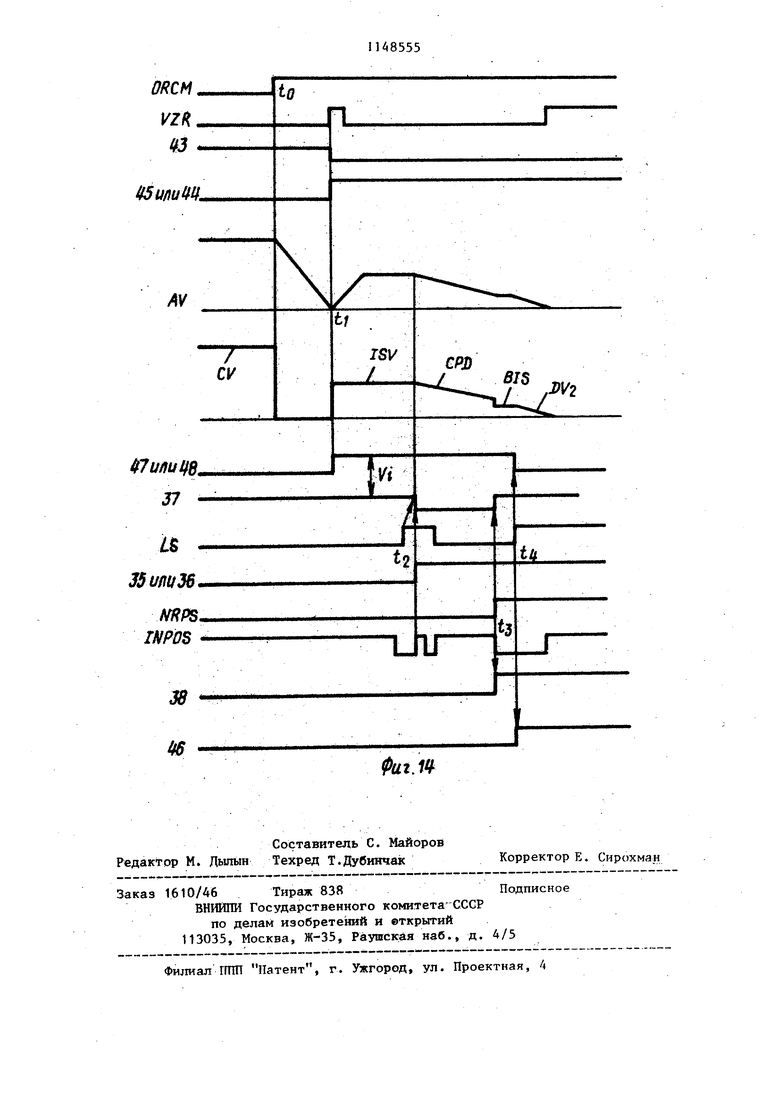
Когда обработка детали заканчивается, устройство управления, такое например, как блок цифрового управления (не доказан), вьщает команду блоку 2 задания режимов работы на подачу сигнала, соответствующего команде, определяющей ориентацию в бло 54 в момент времени t в этот же момент времени сигнал CV , соответст вующий значению Скорости, падает до нуля (фиг. 25). Реальное значение скорости /4V двигателя и шпинделя постепенно уменьшается и достигает нулевое значение в момент времениЧ Когда это происходит, в блоке 25 генерируется импульсный сигнал VZR соответствующий нулевому значению скорости, под воздействием которого бдок 5Д осзпцёствляет переключение переключателя 55 на клемму 57, так что работа блока переключается с управления скоростью на управление положением. Под воздействием импуль ного сигнала V2f блок 25, формирующий сигнал,-соответствующий отклонению от определенного положения, вначале генерирует в качестве сигнала, соответствующего отклонению от определенного положения, пер воначально установленное напряжение J5V. Под воздействием зтого сигнала шпиндель снова начинает вращаться , так что сигнал AV , определяющий р1еальное значение скорос:ти, воз рдста.ет таким обра;зом, чтобы достич величины ;V . По мере того, как магнит части 10а, установленный на шпинделе, продолжает вращаться и достигнет первый раз заранее опре деленного положения (момент времени tj ), блок 25, формирующий:сигна соответствующий отклонению от заранее определенного положения, генерирует сигнал СРВ, определякиций гру бое отклонение от заранее заданного положения, в кач естве сигнала откло нения от определенного положения RP По мере того, как шпиндель:продолжает вращаться и магнит части Юч приближается к области, расположенной вблизи от заранее определенного положения (момент времени tj ), бло 25, формирукиций сигнал, соответствую1ций отклонению от определенного положения, генерирует сигнал смещения 615 в качестве сигнала отклонения от определенного положения RPB Затем когда магнит входит в вышеупомянутую область, расположенную вблизи от заранее (Лфеделенного положения (момент времени 4)« блок 25 генерирует сигнал точного отклонения от определенного положения .1)Ч Когда сигнал IV уменьшается до нуля, т.е. когда магнит части Юя, ра 1 558 положенный на заранее выбранной части шпинделя, оказывается непосредственно против центрального дросселя 12 насыщения, управление положением шпинделя заканчивается. Дроссель насыщения возбуждается высокочастотным импульсным сигналом HFP посредством использования переход ного трансформатора 20. В результате этого на выходах .23 и 24 (фиг. 8) получены выходные напряжения 0V, , где i 1, 2, 3 (фиг. 7), причем зто имеет место для каждого дросселя насыщения, амплитуды этих выходных напряжений пропорциональны значению внешнего магнитного поля Н-..-.,.. , напряженность которого изменяется в соответствии с положением магнита части lOd. Когда магнит части 1Oft удален от дросселя 11 насыщения так, что значение внешнего магнитного поля, действующего на дроссель 11, равно нулю, высокочастотный импульсный сигнал HFP поступает вокруг вертикальной нулевой линии кривой намагничивания дросселя B-H , проходящей через центр этой кривой (фиг.9). В результате этого число линий магнитного потока, пересекающих катушки L, , 1-2 оказывается, одинаковым, так что выходные напряжения, снимаемые с выводов 16 и 17, оказываются равными по амплитуде, но сдвинутыми по фазе на 180. Поскольку эти напряжения выпрямляются соответствующими однополупериодными выпрямителями 21 и 22, потенциалы, воз никанщие на выводах 23 и 24, оказываются равными, так что в результате напряжение между выводами 23 и 24 равно нулю. По мере того, как магнит части 10и приближается к ненасыщаемому дросселю 11, внешнее магнитное поле Н, формируемое магнитом, начинает воздействовать на дроссель 11. Если мы примем, что hp обозначает поле, формируемое высокочастотным импульсньм сигналом HFP , то поток, соответствующий полю Ьв -Нвнеын„пересекает катушку { (фиг. 10), а поток, соответствующий полю bg+Н0цешн, катушку Lj. Если это состояние выразить с помощью кривой В-Н , тр высокочастоттлй импульсный сигнал HFP будет действовать около линии -Ндцещн как относительно центра по отношению к 91 катушке L,;, (фиг. 11) и относительно линии по отношению к катушке Ц (фиг. 12). Поэтому направленный в отрицательном направлении поток, который пересекает кату ку L, приводит к насыщению катушки а следовательно к возникновению изменения небольшой величины (фиг .1 и то время как направленный отрицательно магнитный поток, который пересекает катушку L,- , не вызьтает насьш1ения и создает тем самьм изменение большей величины (фиг. 12), Исходя из того, что наведенное напряжение в определяется величиной NdfcJi (где N равно.числу витков), потенциал на вьшоде 24 становится больше чем потенциал на выводе 23, что приводит к возникновению разности потенциалов между выводами. Этот потенциал изменяется так согласно кривой DV (фиг. 7), по мере того, как магнит части 10« продолжает вращение. Блок 25, формирующий сигнал, соответствующий отклонению от определенного положения, принимает от датчика 10 положения сигнал DV в виде напряжения, который используется в качестве сигнала точного отклонения от определенного положения, когда шпиндель находится в непосредственной близости от заранее определенного положения, в отличие от сигнала грубого отклонения, соот ветствующего сигналу от дросселя 12 насьш1ения, который .расположен по центру (фиг. 5), и сигнал приближения ASV который получается путем складывания напряжений JV , j)V соответствующих соответственнонапряжениям дросселей 11, 12 насьщения, и который свидетельствует о то что шпиндель вошел в область, находящуюся в окрестности заранее определенного положения.. При этом сигнал AV соответствует реальному значению скорости двигателя 4 и то же поступает в блок 25 от тахометра 5 и интегрируется в этом блоке. Результат интегрирования вычитается из первоначально сформированного сигнала ISV напряжения и затем преобразуется в сигнал СРВ , соответст вующий грубому отклонению от опреде ленного положения. Блок 25, предназ ченньтй для формирования сигнала, соответствующего отклонению от опре 510 деленного положения, сконструирован таким образом, чтобы формировать постоянное, первоначально установленное напряжение в виде сигнала JSV и сигнал 639 смещения (фиг. 2о() . Значение V,- напряжения сигнала JSv устанавливается на таком уровне, чтобы оно оказалось равным напряжению , определяницему отклонение от определенного положения, которое соответствует одному повороту (360°) шпинделя. Влок 25, формирующий сигнал, соответствующий отклонению от определенного положения, генерирует первоначально установленное напряжение в виде сигнала 35V от момента времени i, при этом сигнал ОРСМ , являюш;ийся командой ориентации, генерируется до момента времени i2 когда шпиндель первоначально достигает заранее определенного положения. Пос,ле этого, поскольку шпиндель продол жает вращаться и магнит части 10 а (заранее определенная часть шпинделя) достигает заранее определённого положения поворота во второй раз, формируется сигнал СРО, соответствующий грубому отклонению от определенного положения, до тех пор, пока магнит части 10а не приблизится к области (определенной между 6, и +б), расположенной вблизи от заранее определенного положения, т.е. до тех пор, пока он не окажется в положении, обозначенном -0 Кроме того, форшфуется также сигнал BJ5 смещения до до тех пор, пока не будет достигнута указанная вьш1е область. С другой стороны, сигнал DV2, соответствующий точному отклонению от определенного положения, генерируется после того, как магнит части lOoi достиг, :а затем и вошел в область, находящуюся вблизи заранее заданного положения. Результатом всех этих операции является сигнал RPB отклонения от определенного положения (фиг. 2ав и S). Причем сигнал 6JS смещения может быть изъят из сигнала RPD путем установки в равным 9 Если шпиндель вращается в прямом направлении, то осуществляется подсоединение к клемме с напряжением 15В. Предположим, что переключатель 27 установлен в положение, когда он подключен к клрмме с напряжением 15 В в момент времени t., (фиг. 14). Напряжение делится сопротивлениями 28 и 29 и обеспечивает заряд .конденсатора 32 через усилитель 33 и переключатель 37. Напряжение, до ко торого заряжается конденсатор, достигает величины Vj , соответствующе первоначально установленному напряжению в виде сигнала JSV , Если сигнал Ду, соответствующий реальному значению скорости, поступает на интегратор 26 через переключатель 37 или через переключатель 35 после того, как откроется переключатель 37 (в момент времени 2 Н ° денсатор 32 начинает разряжаться с постоянной времени RC , поскольку значение напряжения сигнала, соответствующего реальному значению скорости, AV меньше, чем Vj i в результате него сигнал CPD , определякнций грубое отклонение от заранее заданного .положения, полученный при вычитании проинтегрированного сигнала AV , соответствующего реаль ному значению скорости, из первоначально установленного напряжения в виде ;сигнала Э5У , возникает на вы ходной клемме усилителя 34 (усилитель 34, сопротивление 31 и конденсатор 32 образуют схему интегрирования). Если оба переключателя 37 и 38 замкнуты после того, как сигнал CPD .достиг заранее определенного зн чения по напряжению (момейт времени ij), то интегратор 26 работает в качестве усилителя, причем в этом случае на выходных клеммах усилителя 34 формируется сигнал BUS смещения, соответствующий заранее заданиому уровню. В других вариантах в соответствии с конкретной комбинацией и синхронизацией onepaivm открытия и зака 1кания переключателей 35, 36, 37 и 38 вначале формируется первоначально установленное напр жение в виде сигнала HSV , затем сигнал СРВ , соответствуюпрй грубом отклонению от заранее определенного положения, и в заключение сигнал 8J смещения, г Чтобы обеспечить высокое значение коэффициента усиления блока 25 управления ориентацией шпинделя, когда шестерни, установленные между двигателем 4 постоянного тока и шпинделем 7, сильно отличаются друг от друга (степень редукции велика) обеспечить низкое значение коэффициента усиления, когда шестер 52 ни отличаются не очень сильно (степень уменьшения скорости невелика), нужно сделать коэффициент усиления низким по сравнению с коэффициентом усиления в случае, когда степень уменьшения скорости велика. Когда передаточное отношение велико, то переключатели 35 и 45 замкнуты, а переключатели 36 и 44 разомкнуты для того, чтобы обеспечить увеличение коэффициента усиления, а когда передаточное отношение мало, то переключатели 36 и 44 замкнуты, а переключатели 35 и 45 разомкнуты для того, чтобы понизить коэффициент усиления. Это исключает возможность рыскания и перерегулирования шпинделя при его остановке в заранее заданном положении и позволяет осуществить операцию по остановке шпинделя за меньший промежуток времени вне зависимости от величины передаточного отношения. Сигнал US размыкает переключатели 47 и 48 и замыкает переключатели 46 (в момент времени 4 ) . В результате этого сигнал DV, соответствующий точному отклонению от определенного положения, принимается в качестве сигнала RPD, соответствующего отклонению от определенного положения. Переключатель 47 замкнут, когда управление шпинделем осуществляется при. его вращении в прямом направлеНИИ, причем при вращении шпинделя в обратном направлении переключатель 48 замкнут. Формируемый сигнал JNP05после своего возникновения создает условия, при которых затем в цифровое управляющее устройство посыпается сигнал, соответствующий команде на прекращение операции ориентации. Элементы сравнения 50 и 51 контролируют сигнал DVj , соответствующий точному отклонению от определенного положения, и формируют сигнал NEG , Р05 при приближении шпинделя к заранее определенному положению при вращении в обратном направлении или в прямом направлении. Переключатель 47 замыкается под воздействием сигнала Р05 , а переключатель 48 переходит в аналогичное состояние под воздействием сигнала NEG. Таким образом, если сигнал ORCW,, являюпр йся командой ориентации, . стремится стать 1 в момент времени то сигнал CV , соответствующий реальному значению скорости, падает до нуля, так что при уменьшении реального значения скорости сигнал, соответствующий этому реальному значению, падает до нуля в момент времени i.,-. В этот момент времени сигнал VZR , соответствующий нулевому значению скорости, стремится к значению, соответствующему 1. Переключатель 43 размыкается, один из переключателей 45, 44 замыкается в соответствии с высоким или низким передаточньм числом шестерен, а один из переключателей 47, 48 замыка ется в соответствии с направлением, прямым или обратным, вращения шпинделя. Это образует контур контроля положения, на выходной клемме которого принимается первоначально установленное напряжение в виде сигнала JSV . При этом переключател 37 разомкнут, а переключатели 35, 36 и 38 замкнуты. Под воздействием напряжения сигн ла 35V двигатель снова начинает вращаться, так что при этом шпиндел также вращается и достигает первый раз заранее определенного положения (т.е. сигнал LS соответствует 1 и сигнал 3NP05 , соответствующий на хождению в заданном положении, такж равен 1). В связи с этим в момент времени tj переключатель 37 размь кается, а один из переключателей 35, 36 замыкается в соответствии с высоким или низким передаточным отношением шестерен. Поэтому с выхо ной клеммы снимается сигнал СРГ ,c ответствуюш 1Й грубому отклонению от определенного положения. По мере того как сигналы AV ..соответствующие реальному значению скорости и отклонению бт определенкого положения, уменьшаются и шпиндель подходит к области, находящейся в непосредственной близости от заранее определенного положения поворота во второй раз (в момент времени ii ), схема 41 формирует сигна MftPS (1), под воздействием которо го замыка бтся переключатели 37 и 38 В результате этого с выходной клеммы передается сигнал смещения BJ5 величина которого соответствует заранее определенному уровню. По мере того, как щпинДель продолжает вращаться с меньшей скоростью и достигнет области, находящейся в непосредственной близости от заранее определенного положения поворота (момент времени t4), сигнал LS идет к уровню, соответствующему 1, переключатели 47 и 48 размьпсаются и происходит замыкание переключателя 46. В этой ситуации с выходной клеммы проходит сигнал DV-j , соответствующий точному отклонению от определенного положения. Таким образом, шпиндель может быть остановлен в заранее определенном положении с большой точностью без использования контактируювщх элементов, таких как механические тормоза. В устройстве предусмотрен высокоточный переключатель определения степени приближения, сконструированный таким образом чтобы формировать л сигнал, соответствую щий точному отклонению от определенного положения, когда заранее выбранная точка на шпинделе достигнет области, находящейся в непосредственной близости от заранее определенного положения поворота, в результате чего может быть обеспечена чрезвычайно высокая точность установки в пределах от 0,03 до 0,05, что подтверждено проведенными измерениями. Кроме того, интегрирование напряжения, получаемого на выходе тахометра, позволяет сформировать сигнал, соответствз)щий грубому отклонению от определенного положения, что дает возможность образовать контур управления положением без использования дополнительных датчиков положения, применяя лишь переключатель определения степени приближения. В результате этого обеспечивается значительная экономия средств, затрачиваемых на изготовление устройства. Поскольку система выполнена таким образом, что коэффициент усиления блока Управления ориентацией шпинделя может изменяться в соответствии С передаточным отношением шестерен, величина этого параметра может быть установлена таким образом, чтобы предотвратить возможность рыскания кли перерегулирования и сократить время, необходимое для приведения шпинделя в определенное положе ние.
Шг.2а
Фиг.2В
106
х7
Вид А
18
Ж2
/5siA
.З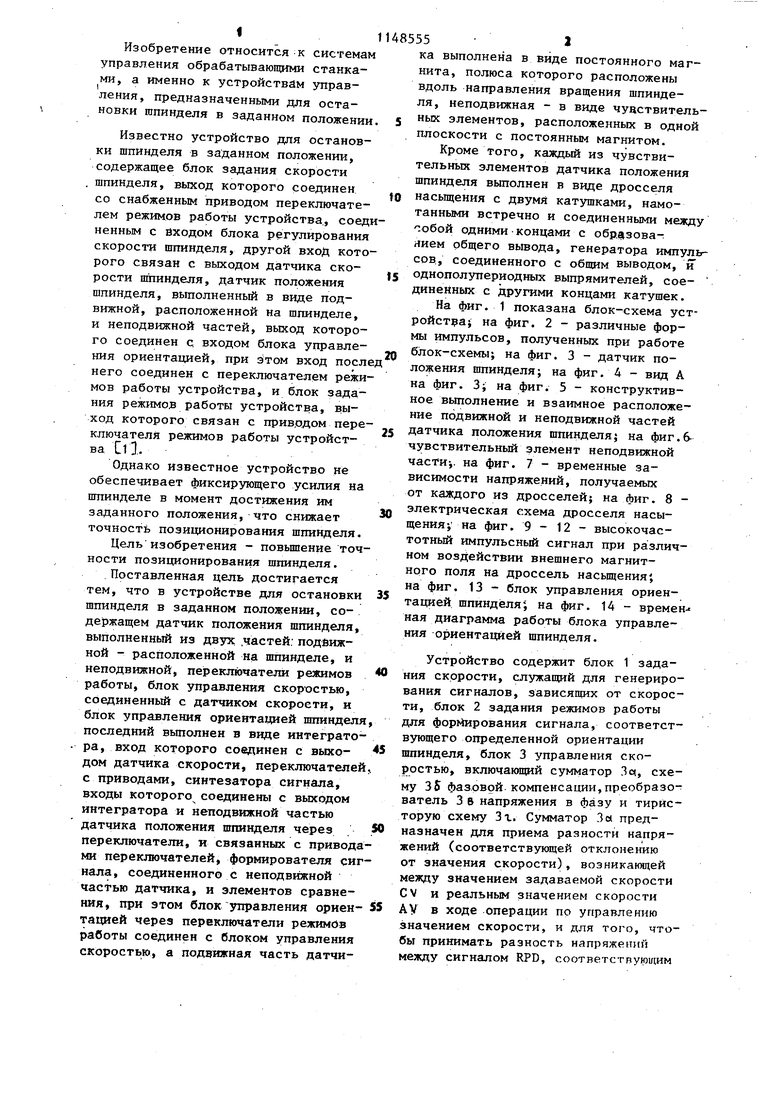
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления для остановки шпинделя в определенном угловом положении | 1980 |
|
SU1308185A3 |
| Устройство для управления остановом шпинделя в заданном положении | 1980 |
|
SU1175357A3 |
| Устройство для останова шпинделя в заданном положении | 1980 |
|
SU1165226A3 |
| Система управления шпинделем | 1978 |
|
SU831060A3 |
| Устройство управления ориентацией шпинделя | 1981 |
|
SU1258316A3 |
| Система управления шпинделем | 1978 |
|
SU724081A3 |
| Тахогенератор | 1980 |
|
SU1279546A3 |
| Устройство для управления асинхронным двигателем | 1979 |
|
SU1192641A3 |
| Асинхронный электропривод | 1981 |
|
SU1327806A3 |
| Реверсивный электропривод постоянного тока | 1979 |
|
SU1056930A3 |
т
/
/7
Т
15 iui.e .
В
СФ)
I HfP
Фиг,9
25
(%г.
п
t.
HlMju ЭШ
fl
it
rs
16
Фиг.10 fitiri 7 1 I ГЛэ L/IJ
to
AV
/ CV
ISV
7u/iutfB. 37 is 35wti3e.
MPS, rNPOS
ж
tft
t2
il
uu
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система управления шпинделем | 1978 |
|
SU724081A3 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
