со сл
00 tN9
00
Изобретение относится к гругзозахватным приспособлениям и может найти применение в перегрузочных машинах ядерных реакторов при извлечении и установке тепловыделяющих сборок и образцов.
Целью изобретения является повышение надежности установки тепловыделяющих сборок любого сечения в ядерный реактор.
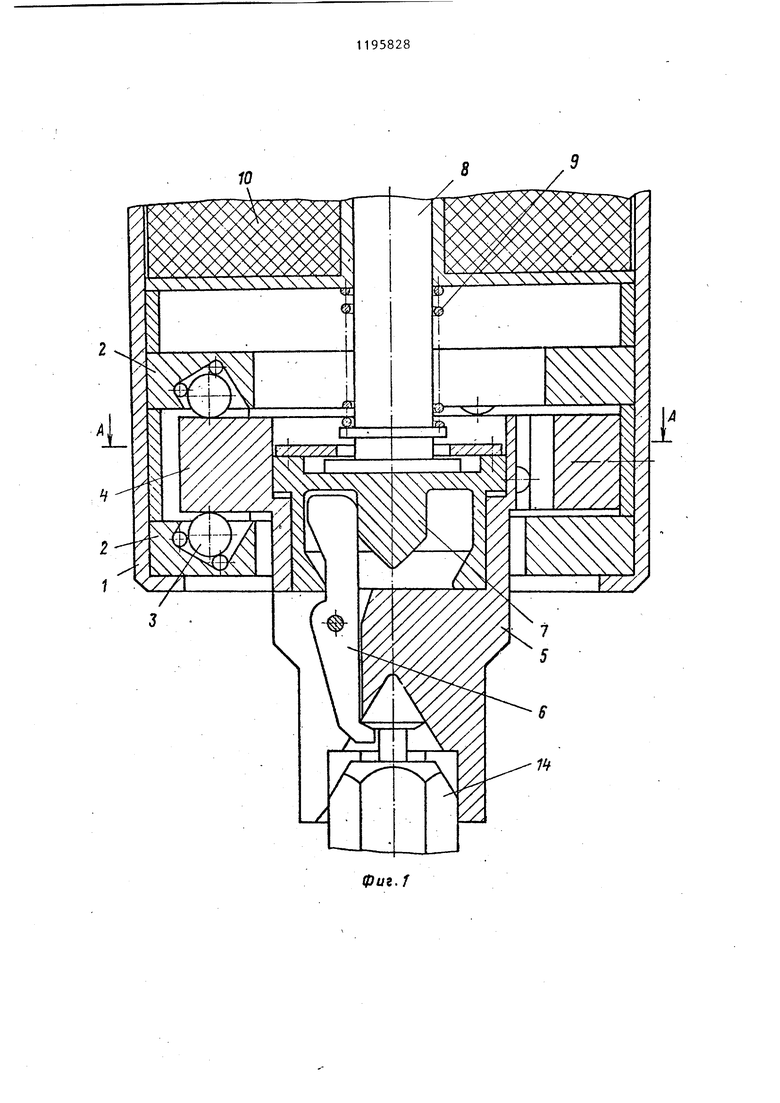
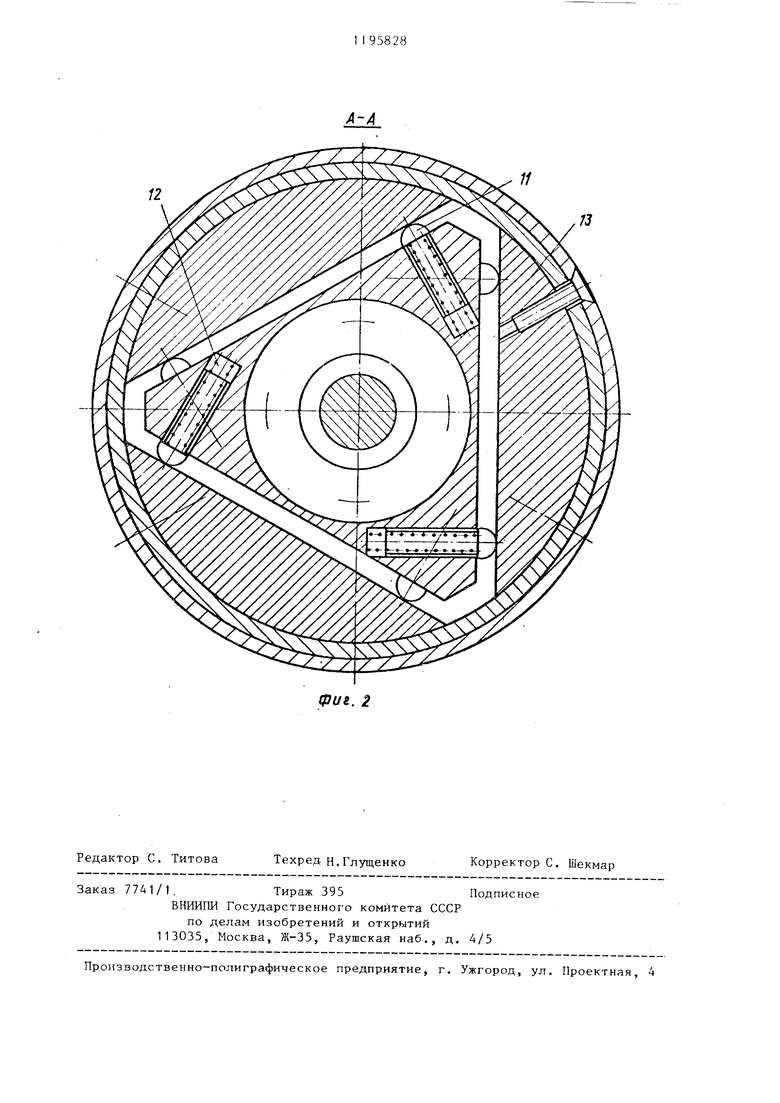
На фиг. 1 показан предложенный дистанционный захват, продольньш разрез; на фиг. 2 - разрез А-А на фиг.1.
Дистанционный захват содержит штангу 1, являющуюся частью перегрузочного устройства, внутри которой размещены обоймы 2 с вмонтированными в них шариковыми опорами 3. Между обоймами установлена опорная площадка 4 корпуса 5. В корпусе 5 размещен механизм открытия и закрытия захвата, представляниций собой сцепной рычаг 6, вззимодействунлций с копиром 7, установленным на якоре 8 с пружиной 9, связыванидей якорь 8 и электромагнит 10, Трехгранная опорная площадка 4 корпуса 5 снабжена подпружинивакнцими пальцами 11 с пружинами 12 Подпружиниваищие пальцы 11 взаимодействуют с установленными в штанге 1 сухарями 13. Сцепной рычаг 6 взаимодействует с головкой тепловыделяющей сборки 14.
Описываемое устройство работает следующим обравом„
Перед опусканием дистан1даонного захвата на тепловыделяющую сборку 14 включается электромагнит 10 и якорь 8 поднимает копир 7, сжимая пружину 9, при этом сцепной рычаг 6 поворачивается в сторону открытия. После открытия захват опускается на голову тепловьщеляющей сборки 14. При отключении электромагнита 10 пружина 9 толкает копир 7 вниз. Сцепной рычаг 6 фиксируется в копире 7. запирая головку тепловьаделяющей сборки 14.
В случае несовпадения осей описываемого рахвата и тепловьщеляющей сборки 14 при опускании головка тепловыделяющей сборки 14 скользит по конусному гнезду корпуса 4. Возникающая поперечная сила перемещает корпус 4 на шариковых опорах 3 до совпадения осей. При этом пружина 12, упирающие пальцы 11 в сухари 13 по {Направлению движения корпуса 4, сжи|маются, а противоположные расслабляются. В случае несовпадения граней тепловыделяющей сборки 14 по углу с профилированной ячейкой ядерного реактора за счет скоса граней на хвостовике тепловыделяющей сборки 14 и входа в ячейку ядерного реактора возникает момент, поворачивающий тепловыделяющую сборку 14 вокруг ее оси до совпадения граней с гранями ячейки. При этом пружины 12, упирающие пальцы 11 в сухари 13 по ходу вращения, сожмутся, а пружины ,упирающие пальцы 11 против хода вращения, разожмутся.
Описываемый захват обеспечивает дистанционное центрирование и компенсацию неточности наведения на ячейку ядерного реактора тепловыделяющей сборки любого сечения за счет того, что корпус механизма открытия и закрытия захвата перемещается в горизонтальной плоскости и по углу при возникающих сдвигающих усилиях, а пр снятии этих усилий возвращается в исходное положение. Захват обеспечивает повьщ1ение надежности перегрузочного оборудования, исключает возможность деформации и поломки дорогостоящих тепловыделяющих сборок,увеличивает безопасность работы обслуживающего персонала и сокращает время перегрузки.
Описьгеаемый захват позволит применять перегрузочные машины меньшей точности, что существенно снижает их стоимость.
фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват для грузов с грибовидной головкой | 1980 |
|
SU922035A1 |
| Перегрузочная машина | 1971 |
|
SU397094A1 |
| Устройство для захвата и транспортировки тепловыделяющего элемента | 2020 |
|
RU2759051C1 |
| Устройство для захвата и транспортировки тепловыделяющего элемента, имеющего кольцевую проточку | 2021 |
|
RU2768793C1 |
| Устройство для захвата и транспортировки тепловыделяющего элемента, имеющего цилиндрическое отверстие | 2023 |
|
RU2810645C1 |
| ПЕНАЛ ДЛЯ ОТРАБОТАВШЕГО ЯДЕРНОГО ТОПЛИВА ВВЭР-1000 | 2011 |
|
RU2468454C1 |
| Уплотнительный узел | 1976 |
|
SU719349A1 |
| Устройство для захвата и удержания тепловыделяющего элемента | 2020 |
|
RU2758104C1 |
| Автоматический захват для транспортировки тепловыделяющих сборок ядерных реакторов | 1972 |
|
SU415947A1 |
| Манипулятор для перегрузки тепловыделяющих сборок ядерного реактора | 1986 |
|
SU1598712A1 |
ДИСТАНЦИОННЫЙ ЗАХВАТ, содержащий гтангу, внутри которой размещена на шариковых опорах опорная площадка корпуса механизма открытия и закрытия захвата, снабженная подпружиниваницими пальцами,о т личзющийся тем, что, с целью повышения надежности установки тепловьщелякмцих сборок любого сечения в ядерный реактор, опорная площадка корпуса вьтолнена трехгранной, причем каждая грань при вершине снабжена подпружинивающими пальцами, размещенными перпендикулярно граням и взаимодействукяцими с тремя сухарями, установленными в штанге параллельно граням опорной площадки корпуса.
| СКОРОСТНАЯ ЖЕЛЕЗНАЯ ДОРОГА ДЛЯ ПЕРЕВОЗКИ КРУПНОГАБАРИТНЫХ ГРУЗОВ И СПОСОБ ЕЕ ЭКСПЛУАТАЦИИ | 2009 |
|
RU2404899C2 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
| Захват для грузов с грибовидной головкой | 1980 |
|
SU922035A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
