(54) ЗАХВАТ ДЛЯ ГРУЗОВ С ГРИБОВИДНОЙ ГОЛОВКОЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Дистанционный захват | 1984 |
|
SU1195828A1 |
| СТЕНД ДЛЯ СБОРКИ ПУЧКА ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 1990 |
|
SU1748381A1 |
| Захватное устройство для грузов с фигурной головкой | 1980 |
|
SU925840A1 |
| Устройство для захвата бурильной трубы | 1979 |
|
SU881293A1 |
| Устройство для подачи и вращения бурового става | 1973 |
|
SU569704A1 |
| ЗАХВАТ ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ АМПУЛ С ПУЧКАМИ ОТРАБОТАВШИХ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 2018 |
|
RU2684394C1 |
| УНИВЕРСАЛЬНЫЙ ПЕРЕГРУЗОЧНЫЙ ЗАЩИТНЫЙ КОНТЕЙНЕР | 2015 |
|
RU2596848C1 |
| Магазин корабельной артиллерийской установки | 2014 |
|
RU2607700C2 |
| Устройство страховочное для транспортировки отработавших гамма-камерных тепловыделяющих сборок | 2019 |
|
RU2722887C1 |
| Устройство для кантования | 1986 |
|
SU1381063A1 |
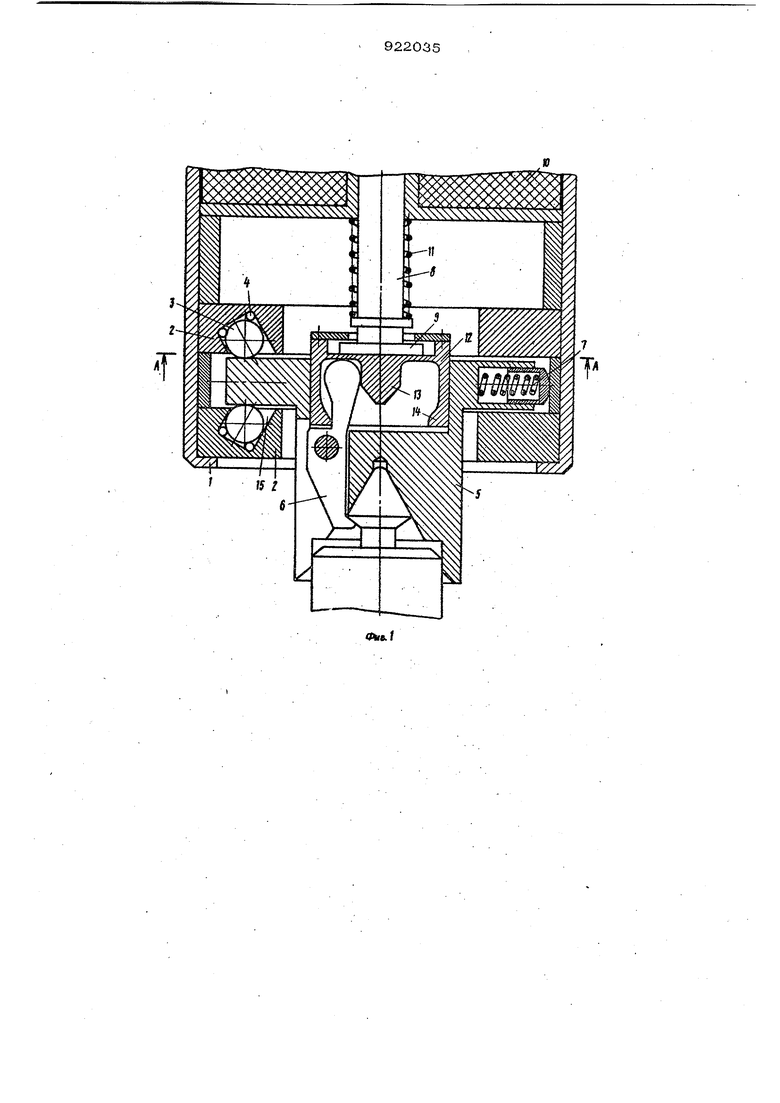
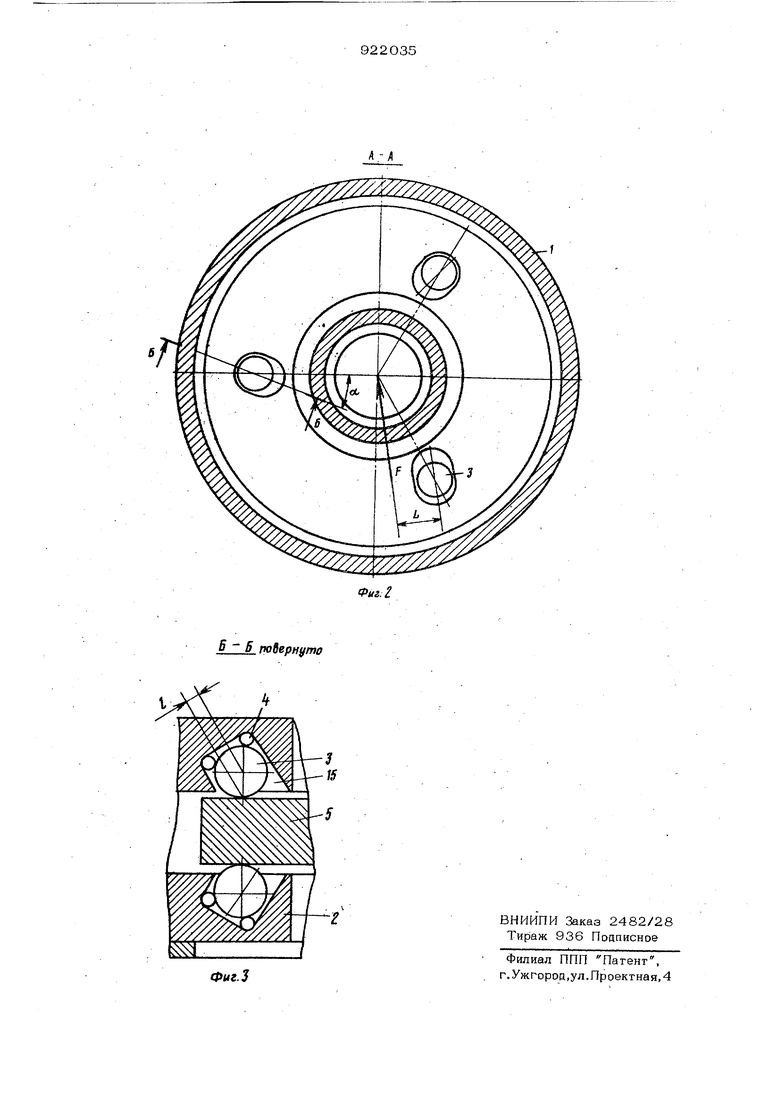
Изобретение относится к грузозахват ным приспособлениям и может найти щэи менение в перегрузочных устройствах ядерных реакторов прн извлечении и установке тепловыделяющих элементов и образцов. Известен захват для грузов с грибовидной головкой, содержащий штанг , подпружиненный корпус, взаимодействующий с механизмом открытия и закрытия захватов, включающим обоймы, в гнез- дах которых размещены шарики, расположенные снизу н сверху корпуса 1. Недостаток известного устройства в том, что шарики в упорном подшипнике не имеют жесткой кинематической связи а удерживаются только силами трения, то. возможно самопроизвольное сползание шариков к стенке щтанги. При необходимости перемещения корпуса в эту же сторону щарики не могут перемещаться и кольцо упорного подшипника будет перемещаться на щаркках с трением скольжения, а так как плечо губок до упорного подшипника больше диаметра, на котором расположены щарики, корпус заклинится в упорном подшипнике, что может гфивести к деформации или поломке тепловьщеляющего элемента. Цель - повьщ1ение надежности работы захвата. Указанная цель достигается тем, что -, обоймы захвата снабжены размещенными в гнездах дополнительными шарика- . ми, на которые опираются основные щарики, а гнезда в обоймах выполнены наклонными, при этомНаклон осей нащэавлен под углом к оси захвата. На фиг. 1 изображено устройство, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2. Устройство состоит из штанги 1, являющейся частью.грузоподъемной машины, имеющей вертикальное перемещение, верхней и нижней обойм 2, щариков 3, дополнительных шариков 4, корпуса 5, сцепного рычага 6, пружин 7, якоря 8 с 39 фланцем 9, электромагнита 10, возвратной пружины 11, копира 12, с центральной частью копира 13 и выступом 14. Устройство работает следующим образом. Перед опусканием захвата на изделие включается электромагнит 10 и якорь 8 через фланец 9 поднимает копир 12, сжи .мая пружину 11. Копир 12 своим высту пом 14 сначала скользит по прямолинейному участку сцепного рычага 6 до выхода из зацепления рычага с центральной частью 13 копира 12, а затем - до наклонной поверхности, тем самым откры вая захват. После открытия захват опус кается на головку изделия. При отклонении электромагнита 10 гфужина 11 толкает копир 12 вниа При этом центральная конусная часть копира 13 поворачивает, а цилиндрическая фиксирует сцепной рычаг 6, запирая головку изделия. В случае несовпадения осей захвата и изделия при опускании захвата головка изделия скользит по конусному гнезду корпуса 5. Возникающая поперечная сила перемещает корпус 5 со сцепным рычаТом 6 до совпадения осей. Так как корпус 5 лежит на шариках 3, оси вращения которых лежат наклонно,. то на каждом шарике 3 создается момент с 8 , равным расстоянию от точки касания щарика 3 и корпуса 5 до оси вращения щарика. Благодаря этому шарики 3 вращаются на шариках 4, которые, в свою очередь, катаются в гнездах 15 Ьбоймы. За счет этого корпус 5 перемещается в поперечном направлении с трением качения.. При этом пружины 7, находящиеся в направлении движения корпуса 5, сжимаются, а противоположные - расслабляются. После снятия нагрузки с корпуса 5 сжатые пружины 7 совмещают центр корпуса 5 с центром щтанги 1. , В случае, если направление перемещения кфпуса 5 совпадает с направлением наклона оси вращения одного из шариков 3, то этот щарик вращаться не будет, так как плечо в этом случае будет равняться нулю, а следовательно, момент также будет равен нулю. Но таккак направление наклона осей вращения других шариков 3 не будет совпадать с нащэавленйем действия поперечной 35 силы, корпус 5 повернется вокруг перво- го шарика 3 на некоторый угол, так как между точкой касания первого шарика 3 и направлением действия силы F будет плечо (t . После этого направление наклона оси ращения щарика 3 не будет совпадать с направлением действия поперечной силы и корпус переместится в этом натфавлении. Диаметр выточки в копире 12 превьинаёт диаметр фланца 9, что позволяет перемещаться копиру 12 с корпусом 5 в поперечном направлении относительно якоря 8. Предлагаемое устройство обеспечивает дистанционное центрирование корпуса захвата при несовпадении осей затрата и изделия, что позволяет применять перегрузочные устройства с меньшей точностью наведения, снижая стоимость перегрузочной машины. Устройство обеспечивает повышенную надежность перегрузочного оборудования и исключает возможность деформации и поломки твэл, чем повьш1ается безопасность работы обслуживающего персонала и сокращается время для осуществления перегрузки твэл. Дистанционное центрирование и захват твэл позволяет обходиться без присутствия человека в зоне воздействия ионизирующего излучения. Формула изобретения Захват,для грузов с грибовидной головкой, содержащий штангу, подпружиг ненный корпус, взаимодействующий с механизмом открытия и закрытия захватов, включающим обоймы, в гнездах которых размещены шарики, расположенные снизу и сверху корпуса, отличающийся тем, что, с целью повышения надежности захвата,, обоймы снабжены размещенными в гнездах дополнительными щарака 1и, на которые опираются основные шарики, а гнезда в обоймах выполнены «наклонными, при этом наклон осей на1фавлан под углом к оси захвата. I Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 293754, кл. В 66 С 1/б8, 1968 (прототип).
