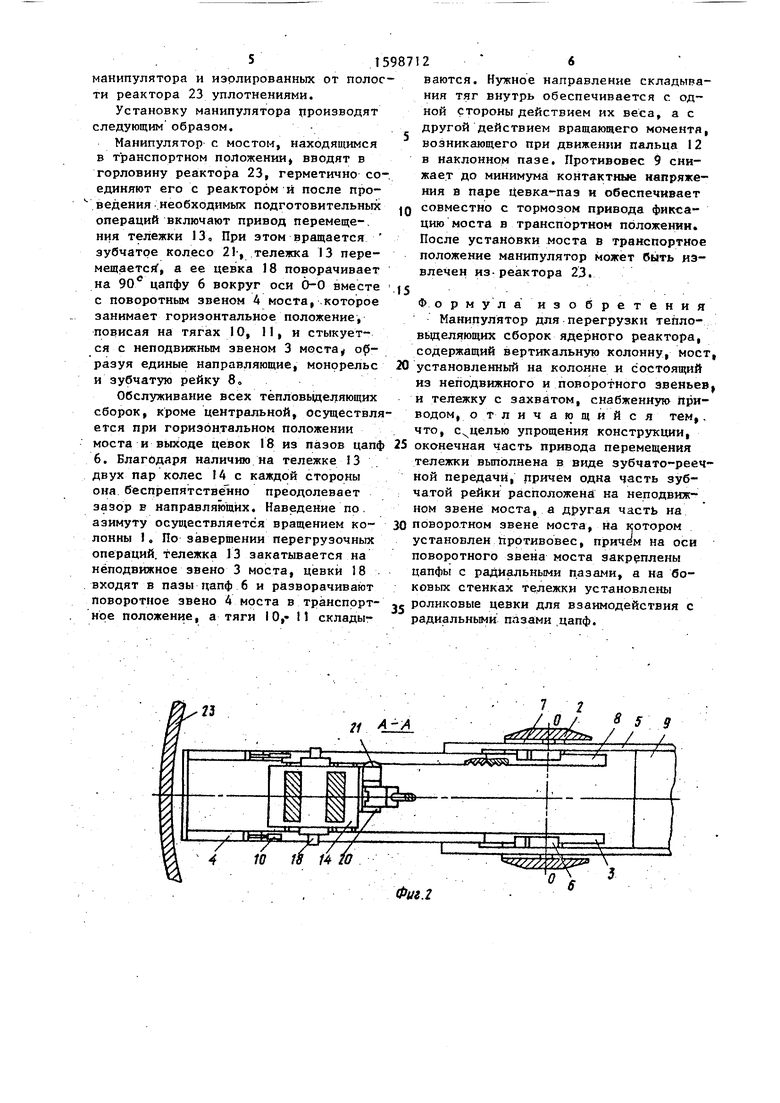
Изобретение относится к области атомной техники и преимущественно может быть использовано в манипуляторах для перегрузки тепловьзделяющих сборок корпусных ядерных реакторов,
Цель изобретения - упрощение конструкции..
На фиг.1 изображен продольный разрез манипулятора, мо ст находится в рабочем положении; на фиг,2 - разрез А-А на фиг,1; на фиг.З - вид на мост в транспортном положении, условно показаны колеса и цевка тележки; на фиг.4 - разрез Б-Б на фиг,1 (тяги не показаны)..
Манипулятор содержит вертикальную колонну 1, к нижней .части которой присоединен корпус 2, показанный на чертежах.упрощенно в виде вилки.D кор- .4 пусе установлен мост, состоящий из неподвижного 3 и поворотного. 4 звеньев. Поворотное звено моста закреплено на двух рычагах 5, которые установлены в подшипниках корпуса на оси 0-0 с помощью цапф 6, имеющих с внутренней , стороны радиальные Лазы. .Непо{1виж- ное звено 6 моста закреплено в корпусе с.помощью кронштейнов 7, не мегоаю0
с
0
: ./ :. .; - .
Щих движению рычагов. На неподвижном звене моста установлены направляющие,. монорельс и закреплена часть зубчатой рейки 8« Другая часть зубчатой рейки 8 закреплена на поворотном звене, снабженном противовесом 9 и складными регулируемыми по длине тягдуи 10, 11, шарнирно закрепленным на мосту и колонне и соединенными между собой с помощью пальца 12, закрепленного в тяге 10 и входящего в паз, вЫ- полненнь1Й в тяге 1 под углом к ее оси. В направляющих моста установлена .тележка 13 на колесах 14, вьтолнен- ная, например, в виде трубы, внутри которой перемещается захват 15, предназначенный для манипуляций с тепловыделяющими сборками 16 и содержащий телескопические валы 17. На боковых стенках тележки закреплены роликовые цевки 18, кроме того, тележка содержит направляющие ролики 19, охватывающие монорельс, и редуктор 20 с зубчатым колесом 21, получающим движе- ние-от телескопического вала 22. Все телескопические валы получают движение через кинематические цепи от приводов, расположенных в верхней части.
манипулятора и иэрлированных от полости реактора 23 уплотнениями.
Установку манипулятора производят следующим образом.
Манипулятор с мостом, находящимся в транспортном положении вводят в горловину реактора 23, герметично соединяют его с реактором и после про- ведения необходимых подготовительных операций включают привод перемеще-. ния тележки 13в При этом вращается зубчатое колесо 21-, тележка 13 пере- мещаетсяГ, а ее цевка 18 поворачивает на 90 цапфу 6 вокруг оси 6-0 вместе с поворотным звеном 4 моста, .которое занимает горизонтальное положение, повисая на тягах 10, 11, и стыкуется с неподвижным звеном 3 моста 00- разуя единые направляющие, монорельс и зубчатую рейку 8,
Обслуживание всех тёпловьщеляющих сборок, кроме центральной, осуществляется при горизонтальном положении
20 установленный на колонне и состоящий из неподвижного и поворотного звенье и тележку с захватом, снабженную при водом, о т личающийся тем, что, с целью упрощения конструкции.
моста и выходе цевок 18 из пазов цапф 25 оконечная часть привода перемещения
6. Благодаря наличию на тележке 13 двух пар колес 14 с каждой стороны она беспрепятственно преодолевает заэор в направляющих. Наведение по. азимуту осуи1ествляется вращением колонны 1. По завершении перегрузочных операций, тележка 13 закатывается на неподвижное звено 3 моста, цевки 18 входят в пазы цапф 6 и разворачивают
тележки выполнена в виде зубчато-рее ной передачи, причем одна часть зубчатой рейки расположена на неподвиж- ном звене моста, а другая часть на 30 поворотном звене моста, на котором установлен противовес, причем на оси поворотного звена моста закреплены цапфы с радиальными пазами, а на боковых стенках тележки установле1Ш
поворотное звено 4 моста в транспорт- роликовые цевки для взаимодействия с ное положение, а тяги 10,- 1 склады- радиальными пазами цапф.
веются. Нужное направление складывания тяг внутрь обеспечивается с одной стороны действием их веса, а с другой действием вращающего момента, возникающего при движении пальца 12 в наклонном пазе. Противовес 9 снижает до минимума контактные напряжения в паре цевка-паз и обеспечивает совместно с тормозом привода фиксацию моста в транспортном положении. После установки моста в транспортное положение манипулятор может быть извлечен из-реактора 23.
15 ; . . / Формула изобретения Манипулятор для перегрузки тепло- вьвделяющих сборок ядерного реактора, содержащий вертикальную колонну, мост,
20 установленный на колонне и состоящий из неподвижного и поворотного звеньев, и тележку с захватом, снабженную приводом, о т личающийся тем,. что, с целью упрощения конструкции.
5 оконечная часть привода перемещения
тележки выполнена в виде зубчато-рееной передачи, причем одна часть зубчатой рейки расположена на неподвиж- ном звене моста, а другая часть на 30 поворотном звене моста, на котором установлен противовес, причем на оси поворотного звена моста закреплены цапфы с радиальными пазами, а на боковых стенках тележки установле1Ш
роликовые цевки для взаимодействия с радиальными пазами цапф.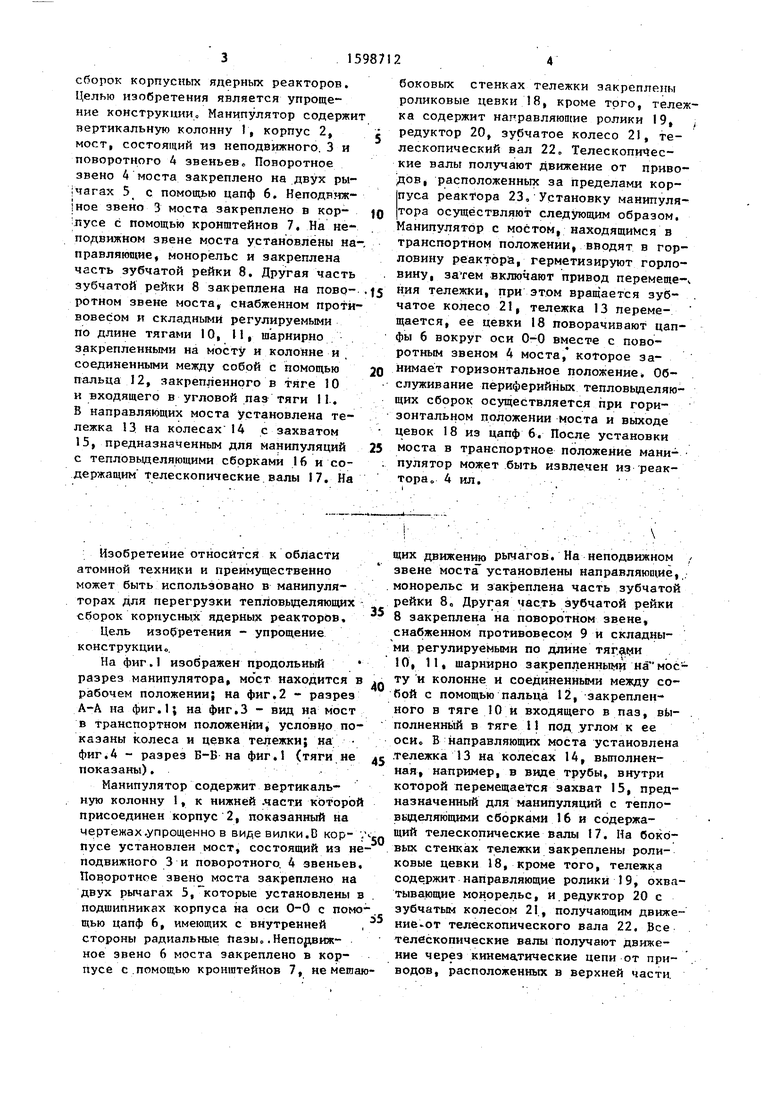
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР ДЛЯ ПРОВЕДЕНИЯ ИЗМЕРЕНИЙ, ИСПЫТАНИЙ, ИССЛЕДОВАНИЙ И РЕМОНТА ВНУТРИ ОТКРЫТОГО СВЕРХУ И РАСПОЛОЖЕННОГО В КОРПУСЕ НАПОРНОГО БАКА РЕАКТОРА | 1984 |
|
RU2018985C1 |
| МАНИПУЛЯЦИОННОЕ КОНТРОЛЬНОЕ УСТРОЙСТВО | 2015 |
|
RU2607721C1 |
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
| Захват манипулятора | 1978 |
|
SU753629A1 |
| Камера разделки топливных сборок ядерного реактора | 1984 |
|
SU1250081A1 |
| УСТРОЙСТВО ДЛЯ РЕЙДОВОЙ ЗАГРУЗКИ ИЛИ РАЗГРУЗКИ СУДОВ | 2005 |
|
RU2381167C2 |
| МАШИНА ДЛЯ ПЕРЕГРУЗКИ ТЕПЛОВЫДЕЛЯЮЩИХ СБОРОК ЯДЕРНОГО РЕАКТОРА | 2002 |
|
RU2236052C2 |
| Подвесной манипулятор для протяжки моделей и сборки крупногабаритных форм | 1988 |
|
SU1646673A1 |
| Вакуумный питатель | 1956 |
|
SU108941A1 |
| Монорельсовая транспортная система | 1984 |
|
SU1230892A1 |

Изобретение относится к рбласти I атомной техники и преимущественно мог жат быть использовано в манипуляторах для перегрузки тепловьщеляющих ., 
f / / /
.. 1 .: / . /о
Фи.г
Фие.5
J.eAaKTOp Г.Наджарян
Составитель Б.Фокин Техред МГХодаинч
Заказ 1973
Тираж
ВНИИТ1И Государственного комитета по изобретениям и открытиям при ГКИТ CQCP 113035, Москва, Ж-35, Раушская наб., д. А/5
6-6
18
Ц
П
ФиъА
Корректор О.Кравцова
Подписное
| Массообменный аппарат с барботажным слоем | 1983 |
|
SU1080836A1 |
