Изобретение относится к автоматике и измерительной технике и может быть использовано, например в автоматических системах гироскопических приборов для преобразования угловых перемещений в электрический сигнал. Цель Изобретения - повышение точности путем компенсации электро магнитного момента нагруженного датчика. На фиг. 1 изображен датчик угловых перемещений; на фиг. 2 - заг висимость электромагнитного момент от угла поворота при наличии и отсутствии дополнительной обмотки. Датчик угловых перемещений содержит ротор 1, в пазах которого уложена обмотка 2 возбуждения и ст тор 3 с уложенной в его пазы выходной обмоткой 4. Кроме того, в дополнительных пазах статора 3 раз мещена дополнительная обмотка 5, соединенная последовательно с обмоткой- 2 возбуждения. Начало допол нительной обмотки 5 (первый паз) имеет пространственньш сдвиг по от ношению к выходной обмотке 4, замкнутой на сопротивление нагрузки 6 Повышение точности за. счет компенсации электромагнитного момента нагруженного датчика достигается путем специального распределения витков дополнительной обмотки 5 и объясняется следующим образом. При подаче напряжения питания на последовательно соединенные обм ку 3 возбуждения и дополнительную обмотку 5 в воздушном зазоре возникает магнитный поток, наводящий ЭДС в выходной обмотке 4. При замы кании выходной обмотки 4 на сопротивление нагрузки 6 создается сумм ный электромагнитный момент, дейст вующий на подвижную часть (ротор 1 датчика. Электромагнитный момент о ределяется вьфажением
SM
К ff-Т J
г5
(О
Эо
I - вектор тока через последовательное соединение обмотки 2 возбуждения и дополнительной обмотки 5;
V
I - комплексно-сопряженная величина вектора тока I;
где зависимость М (f) определяется расчетным или экспериментальным путем. Сопротивление контура, состощего из последовательного соединения обмотки 2 возбуждения и дополнительной обмотки 5, определяется выражением
Z,. j;,J,,.,,, %
V(oC))k
-21
W.
W2
J -j(2
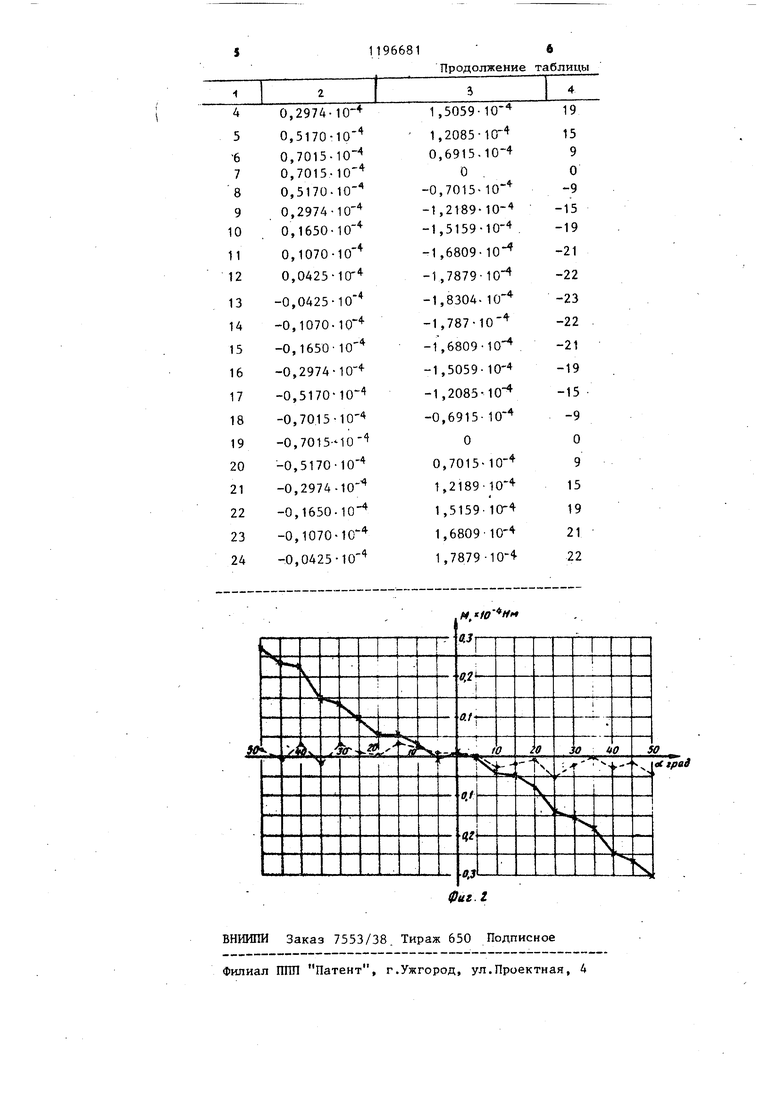
)2812 - комплексно-сопряженная 4 величина вектора тока в выходной обмотке 4; , - взаимные индуктивности между обмотками 2 и 5, 2 и 4 соответственно; оС - угол поворота ротора 1 относительно статора. Условия компенсации электромагнитного момента выполняются при равенстве и встречной направленности двух составляющих, входящих в вьфажение (1), первый член которого определяет электромагнитный момент, создающийся за счет введения дополнительной обмотки 5 и соединения ее с обмоткой 2 возбуждения, а второй член соответствует электромагнитному моменту нагруженного датчика при отсутствии дополнительной обмотки 5. Поскольку ток Ig в обмотке 2 возбуждения намного превышает ток 1 в выходной обмотке, необходимая компенсация электромагнитного момента обеспечивается при числе витков обмотки 5, значительно меньшем, чем число витков выходной обмотки 4 и обмотки2 возбуждения. Кроме того, можно пренебречь изменениями тока возбуждения Ig при перемещении ротора 1 относительно статора 3, поэтому требуемый закон компенсации будет определяться законом изменения взаимной индуктивности Mjj, которая, в свою очередь, зависит от распределения витков дополнительной обмотки 5. ЗаХон распределения витков дополнительной обмотки 5 определяется исходя из зависимости электромагнитного момента нагруженного датчика М (d) от угла поворота ротора 1 в соответствии с соотношением M(oi), (г где индуктивное сопротивление в э аимоиндукции; {d} - закон распределения допол нительной обмотки 5; Wj т число витков обмотки возбуждения;Wj - число витков первого паза дополнительной обмотки 5; зе с, fs индуктивные сопротивления , рассеяния обмоток 2 и 5 соответственно; активные сопротивления об моток 2 и 5 соответственн Учитывая малость члена по сравнению с 1, получаем выражение взаимной индуктивности М ISTin где f - частота питающего напряжения . Из выражений (2) и (4) получаем закон распределения витков дополнительной обмотки 5 л)(/г дУ() M(etlAui . С5 W.r: эе. 5 в м Из полученного выражения (5) следу ет, что изменение числа витков 4W при переходе от i-ro паза, соответ ствующего угловому положению в,-, к следующему i+l-ioMy пропорциональ но произведению компенсируемого в этом угловом диапазоне момента М на угловое перемещение uoi.( ( соответствующему переходу от i-ro паза к i+1-ому пазу, т.е. iW-«/,- M Moi«Wi -fn t где Z - число равномерно распределенных пазов дополнительно обмотки 5. Число витков,первого паза обмотки 5 We рассчитывается из соотношения MUldode-If W,, а/ о. W J- 8 .г«...,, «м1|2 i-t : а число витков в каждом i-м пазу i SI М,.51М: , Св) i t г- 7 м в где М; - компенсируемый электромаг.нитный момент нагруженного датчика в угловом положении,.соответствующем i-му пазу дополнительной обмотки. Экспериментальная проверка предлагаемого устройства изготовления датчика проводилась для датчика с 24 пазами на статоре с сосредоточенными обмотками возбуждения и выходной. Определялся ток возбуждения при питании датчика напряжением 10 В частотой f 1000 Гц, который составил I 6,57-10 А. В угловых положениях, соответствукицих 24 пазам дoпoлнитeJ ьнoй обмотки, определялись значения электромагнитного момента при нагрузке R|4 20 кОм. Рассчитывались витки дополнительной обмотки в соответствии с вьфажением (7). Данные измерений и расчета представлены в таблице. На фиг. 2 представлена зависимость электромагнитного момента для указанного датчика с дополнительной обмоткой (пунктир;ная линия) и без дополнительной обмотки (сплошная линия). При изготовлении датчика по предлагаемому способу обеспечивается снижение электромагнитного момента более, чем в пять раз, что обеспечивает существенное повьшение точности автоматических систем, содержащих датчики угловых перемещений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Индукционный датчик угла | 1980 |
|
SU956974A1 |
| Двухканальный датчик фазы | 1979 |
|
SU864319A1 |
| Многополюсный преобразователь угла поворота вала в фазу электрического сигнала | 1981 |
|
SU998863A1 |
| Бесконтактный преобразователь угла поворота с сосредоточенными обмотками | 1985 |
|
SU1328887A1 |
| Устройство для измерения частоты вращения и углового ускорения | 1984 |
|
SU1254574A1 |
| Ьесконтактный датчик углового положения | 1977 |
|
SU641481A1 |
| Многополюсный вращающийся трансформатор | 1980 |
|
SU898565A2 |
| СПОСОБ ПУСКА СИНХРОННЫХ МАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2096902C1 |
| ШЕСТИФАЗНЫЙ ВЫСОКОСКОРОСТНОЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ С КОНЦЕНТРИЧЕСКИМИ ОБМОТКАМИ, УПРАВЛЯЕМЫЙ ТРЕХФАЗНЫМ ТОКОМ СИНУСОИДАЛЬНОЙ ФОРМЫ | 2013 |
|
RU2540104C1 |
| ШЕСТИФАЗНЫЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ С КОНЦЕНТРИЧЕСКИМИ ОБМОТКАМИ, УПРАВЛЯЕМЫЙ ТРЕХФАЗНЫМ ТОКОМ СИНУСОИДАЛЬНОЙ ФОРМЫ | 2013 |
|
RU2540957C1 |
ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ, содержащий ротор со сосредоточенной обмоткой возбуждения и статор со сосредоточенной выходной обмоткой, о т л и ч а ю щ.н и с я тем, что, . с целью повьшения точности его в работе путем компенсации электромагнитного момента нагруженного датчика, на статоре расположена дополнительная распределенная обмотка, последовательно соединенная с обмоткой ротора, при этом число витков этой обмотки уменьшается с увеличением их угловой координаты пропорционально произведению угла на электромагнитный момент нагруженного датчика. со Од О) X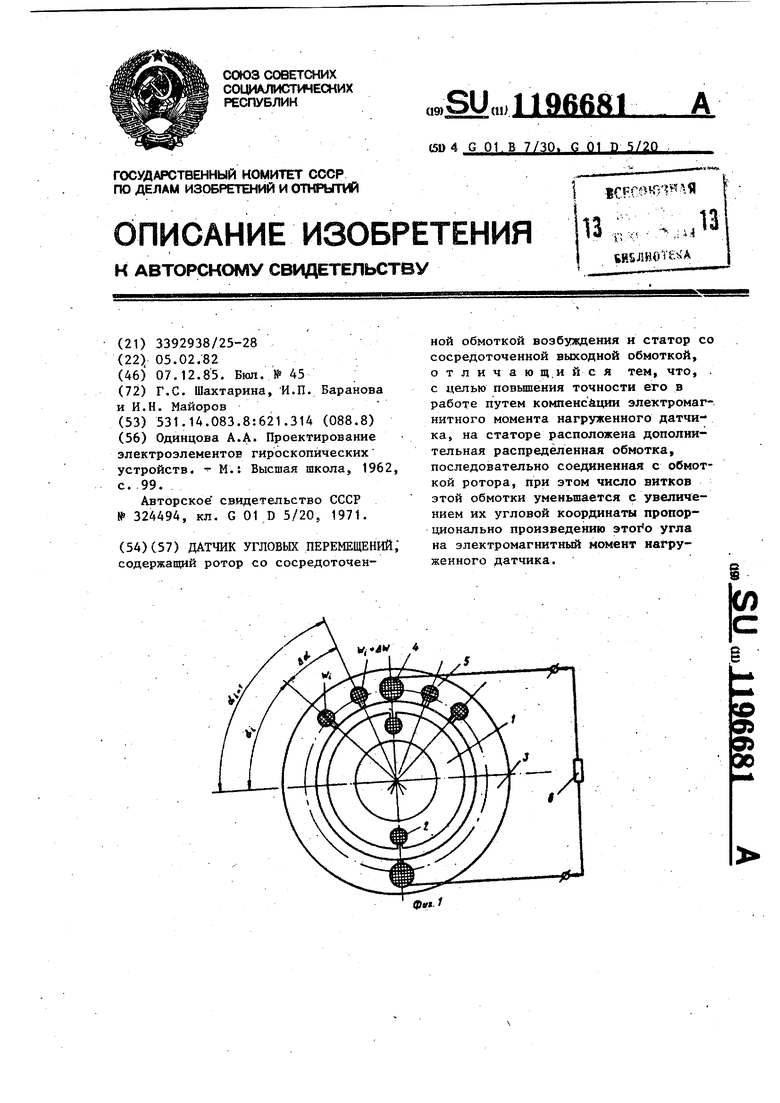
| Одинцова А.А | |||
| Проектирование электроэлементоЕ гироскопических устройств | |||
| - М.: Высшая школа, 1962, с | |||
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 0 |
|
SU324494A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
