Изобретение относится к измерительной технике и может быть использовано, например, в гироскопическом приборостроении.
Известен индукционный датчик углового перемещения, содержащий Ш-образный сердечник с размещенными на нем обмотками и поворотный якорь l .
Недостатком этого датчика является узкий диапазон линейности статичес-кой характеристики,не превышающий±7
Наиболее близким по технической сущности к изобретению является индукционный датчик угла, содержащий цилиндрический статор, диаметрально размещенную на статоре сосредоточенную обмотку возбуждения, концентрично размещенный внутри статора цилиндрический ротор и диаметрально размещенную на роторе выходную обмотку 2 .
Недостатками известного датчика являются появление электродинамического момента взаимодействия между, ротором и статором при работе нагруженного датчика и искажение его выходной характеристики, которые обусловлены изменением реактивного сопротивления выходной обмотки нагруженного датчика (в общем случае изменением ф&зы выходного сигнала, в зависимости от угла поворота рото- ; ра) .
Целью изобретения является повышение точности измерения путем компенсации электродинёмического момента и улучшения линейности статической характеристики.
Поставленная цель достигаемся
10 тем, что индукционный датчик угла, содержащий цилиндрический статор, диаметрально размещенную на статоре сосредоточенную обмотку возбуждения, концентрично размещенный 15 внутри статора цилиндрический ротор и диаметрально размещенную на роторе выходную обмотку, снабжен включенным параллельно выходной обмотке варикондом, емкость которого выбра20на из соотнесения
1
С
U3CX,(l-«6)J
j Де ос
угол поворота ротора;
Э 00 круговая частота тока питания датчика;
Х - индуктивное сопротивление выходной обмотки;
Xj - индуктивное сопротивление
30 обмотки возбуждения;
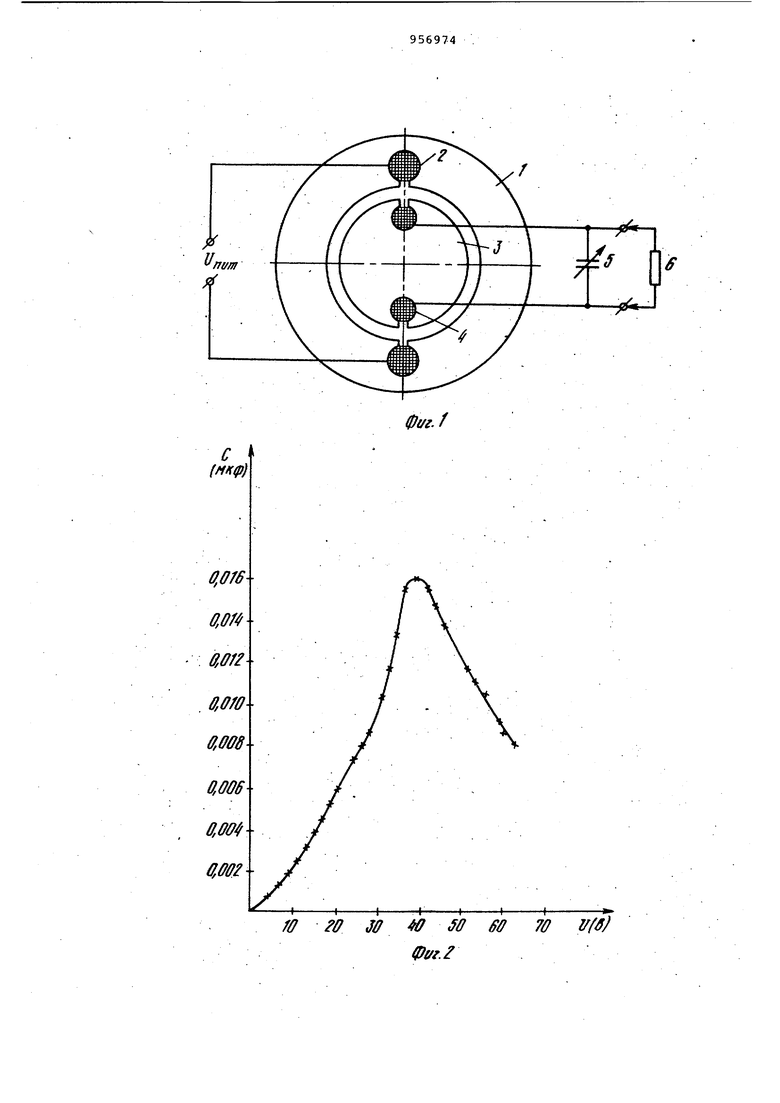
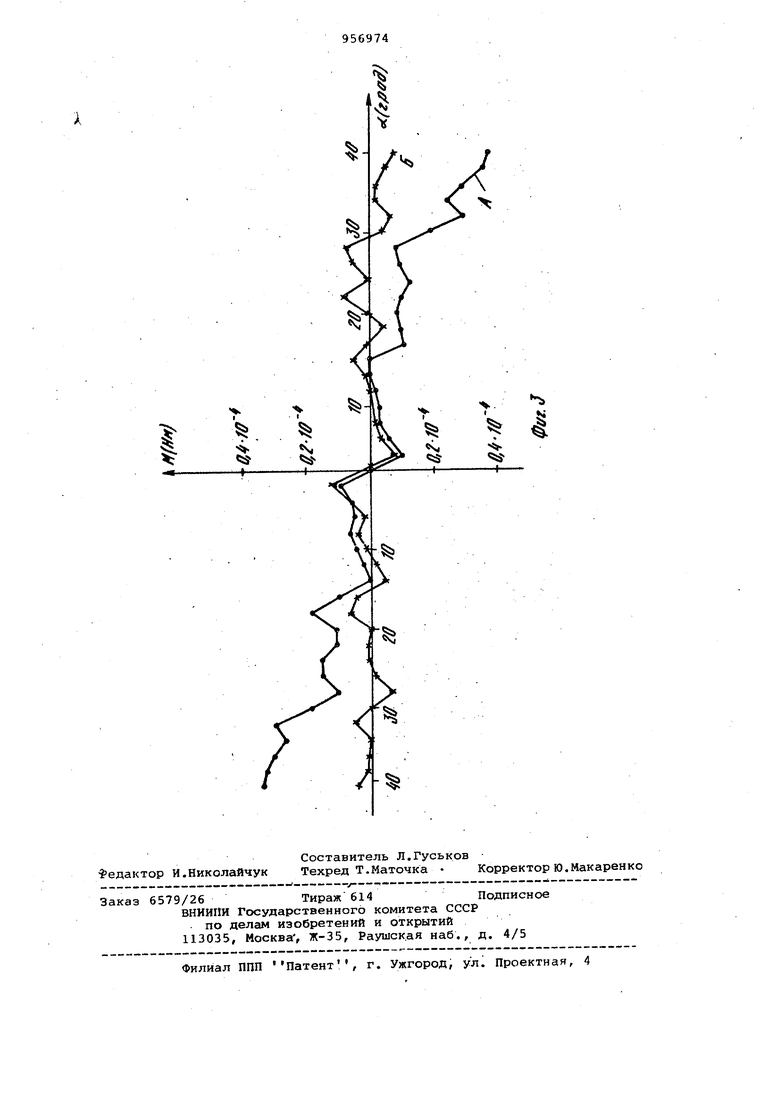
Хр, - сопротивление взаимной индукции выходной обмотки и обмотки возбуждения; К - отношение числа витков вы:Кодной обмотки к числу витков обмотки возбуждений. На фиг.1 представлена принципиальная схема датчика;на фиг.2 - закон изменения емкости вариконда; HJL. фиг.З - зависимость электродинамического момента от угла поворота ротора.
Индукционный датчик угла (фиг,1) содержит статор 1, диаметрально размещенную на статоре 1 сосредоточенную обмотку 2 возбуждения, концентрично размещенный внутри статора 1 цилиндрический ротор 3 и диаметрально размещенную на роторе 3 выходную обмотку 4. Параллельно выходной обмотке 4 подключен вариконд 5, а также нагрузка 6.
Датчик работает следующим образом. . ,
При .подключении обмотки 2 возбуждения к источнику питания (не показан) возникает магнитный поток, наводящий ЭДС в выходной обмотке 4.
Фазовый сдвиг между потоком возбуждения и током выходной обмотки 4 может быть определен по формуле х.+х,,ки-)б )
COS Ч ,, ,
(,г-.,,.
(О
где Tj , г., Tjn - активные сопротивления обмоток и нагрузки.
Для получения cos (р О, что соответствует фазовому сдвигу ii/2, необходимо выполнить условие
Хц+Х,+Х,(1-об2) 0. . (2) Для выполнения условия () необходимо, чтобы емкость с вариконда 5, включенного параллельно выходной обмотке 4, изменялась в зависимости от угла поворота ротора 3 в соответствии с соотношением . J
w X4-t-X2K -fX()J где м - угол поворота ротора;
со - круговая частота тока питания датчика; Х - индуктивное сопротивление
выходной обмотки; Ху - индуктивное сопротивление
обмотки возбуждения; Х„ - сопротивление взаи1 иой индукции выходной обмотки и обмотки возбуждения. Практический подбор вариконда с требуемой зависимостью емкости не представляет трудности. При необходимости желаемая характеристика может быть получена путем соответствующего параллельного и последовательного включения нескольких варикондов
Таким образом, в описанном датчике угла обеспечивается постоянный фазовый сдвиг, равный /2, между потоком возбуждения, и током выходной обмотки, что соответствует отсутствию злектродинамического момента. При этом также снижается искажение линейности статической характеристики.
На фиг.2 представлена характеристика вариконда ВК-2 включавшегося параллельно нагрузке б величиной 10 кОм. На фиг.З представлены зависимости электродинамического момента от угла поворота 3 датчика при отсутствии (кривая А) и наличии .(кривая Б) вариконда 5. Как следует из сравнения характеристик, величина электродинамического момента при введении вариконда 5 пренебрежимо 0 мала в диапазоне углов 140°. При этом, линейность статической характеристики датчика улучшается на 5-10%. .
Формула изобретения
Индукционный датчик угла, содержащий цилиндрический статор,
30 диаметрально размещенную на статоре сосредоточенную обмотку возбуждения, концентрично размещенный внутри статора цилиндрический ротор и диаметрально размещенную на ротор
35 выходную обмотку, отличающийся тем,, что, с целью повышения . точности измерений путем компенсации электродинамического момента и ул.учшения линейности статической
40 характеристики, он снабжен подключенным параллельно выходной обмотке варикондом, емкость которого выбрана из соотношения
С 1
45 wLXf--XjK+X d-c ) где oi - угол поворота ротора;
03 - круговая частота тока питания датчика; Х - индукт.ивное сопротивление
выходной обмотки; . Ху - индуктивнее сопротивление
обмотки возбуждения; Xff,- сопротивление взаимной индукции выходной «бмотки и обмотки возбуждения;
55 к отношение числа витков выходной обмотки к числу витков обмотки возбуждения. Источники информации, принятые во внимание при экспертизе 60 1. Авторское свидетельство СССР 389403, кл. G 01 D 5/20, 1973.
2. Одинцов А.А. Проектирование элементов гироскопических устройств М., -Высшая школа , 1962, с. 99, 65 рис.42 .а.
С
(МКф)
го jff sff ffff 70 vfs}
0i/i.f
фуг.г
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угловых перемещений | 1982 |
|
SU1196681A1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГО ПЕРЕМЕЩЕНИЯ | 1991 |
|
RU2006790C1 |
| Бесконтактный индуктивный датчик | 1957 |
|
SU115489A1 |
| ГИРОСКОП | 2019 |
|
RU2728733C1 |
| Бесконтактный многоканальный датчик угла | 1987 |
|
SU1538207A1 |
| Бесконтактный преобразователь угла поворота с сосредоточенными обмотками | 1985 |
|
SU1328887A1 |
| Двухканальный датчик фазы | 1979 |
|
SU864319A1 |
| Многополюсный вращающийся трансформатор | 1980 |
|
SU898565A2 |
| Датчик угла поворота | 1987 |
|
SU1506268A1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1998 |
|
RU2148788C1 |