. .
Изобретение относится к голографии, в частности к устройствам для восстановления с голограмм пространственных изображений с последующим измерением геометрических пара-метров восстановленных объектов.
Цель изобретения- повьпцение производительности измерений и качества телеизображений.
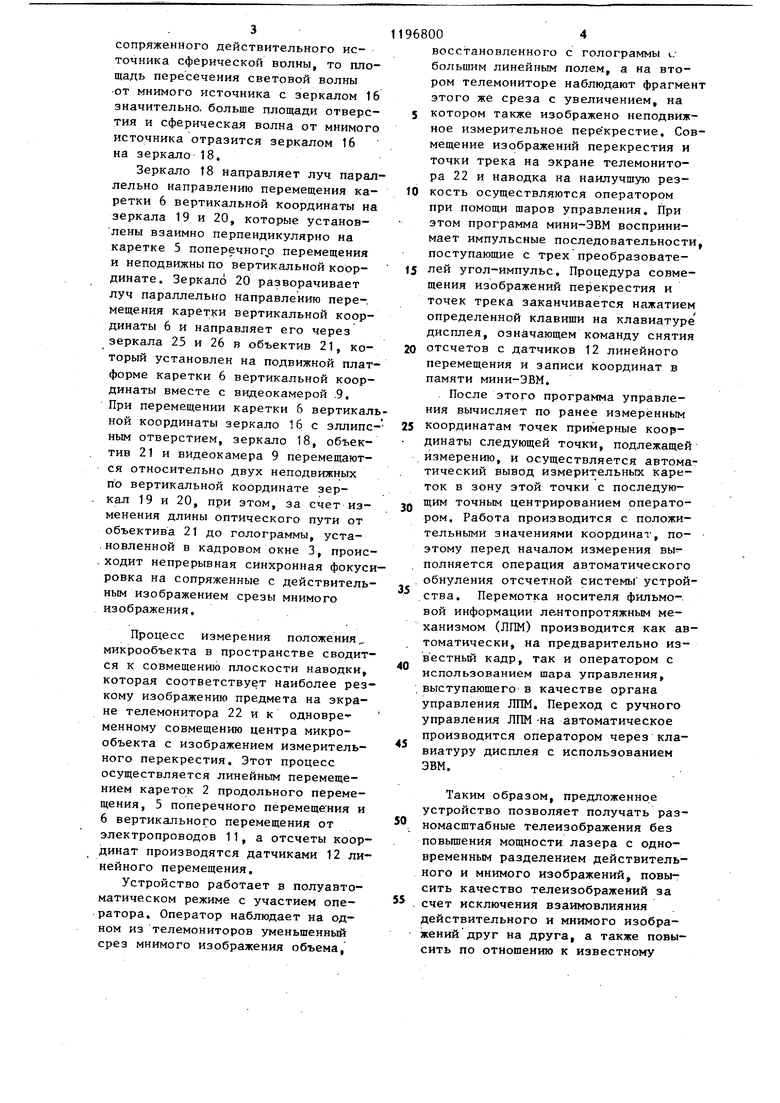
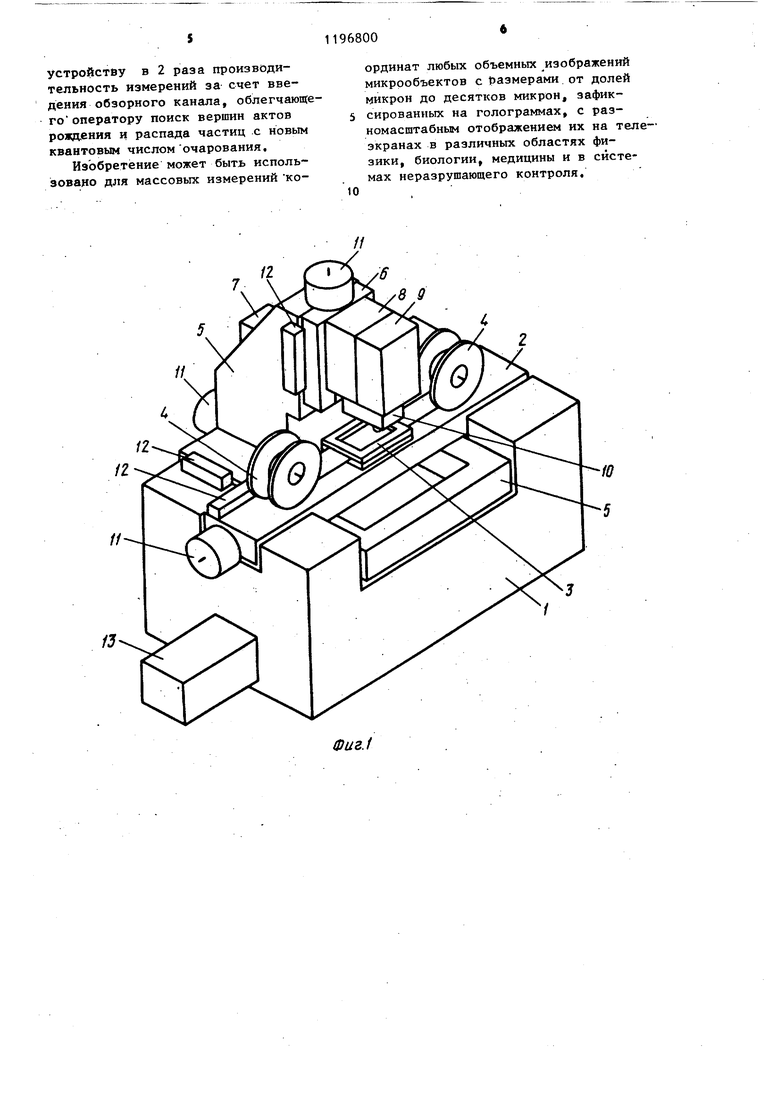
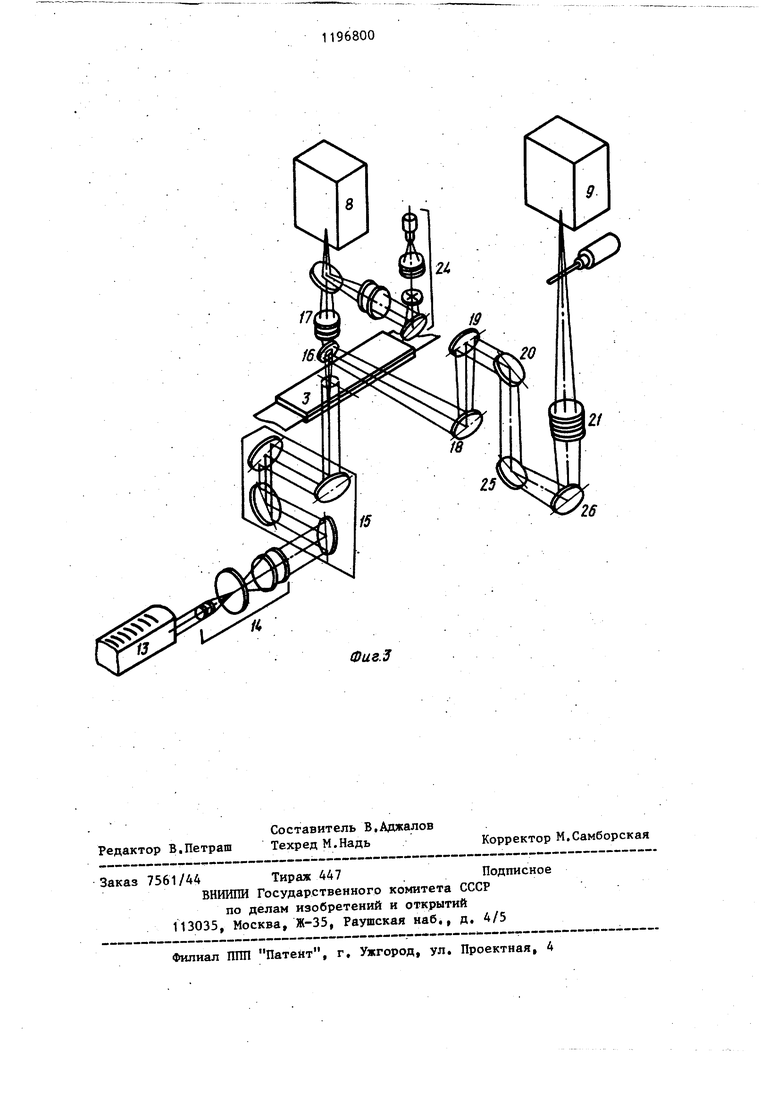
На фиг,1 изображен компоновочная схема устройства} на фиг.2 принципиальная .схема устройства; на фиг.З - конструктивная оптическая схема устройства.
Устройство содержитстанину 1 (фиг.1), на которой смонтированы каретка 2 продольного перемещения с кадровым окном 3 и лентопротяжным механизмом 4, каретка 5 поперечного перемещения, на которой установлена каретка 6 вертикальной координаты, сбалансированная противовесом 7, На каретке вертикальной координаты установлены видеокамеры 8 и 9, оптический блок .10 разделения световых полей от действительного и мнимого изображений, обеспечивающий синхронность перемещений разномасштабных изображений. Все три каретки снабжены электроприводами 11 и датчиками 12 линейного перемещения.
В станине (фиг,2 и 3) вмонтированы последовательно расположенные лазерный осветитель 13, система 14 коллимирования и фильтрации света, система 15 зеркал, обеспечивающих освещение измеряемой зоны голограммы. На каретке 6 вертикального перемещения над кадровым окном 3 установлено зеркало 16 с центральным эллипсным отверстием, измерительный объектив 17, оптически связанны с видеокамерой 8, подвижное по вертикальной координате зеркало 18. На каретке 5 поперечного перемещения установлены два неподвижных . по вертикальной координате зеркала 19 и 20, На каретке 6 вертикального перемещения расположены также длиннофокусный объектив 21 обзора мнимого изображения, оптически связанный с видеокамерой 9. Сигналы с видеокамер 8 и 9 поступают соответственно на телемониторы 22 и 23. На видеокамеру 8 одновременно проецируется измерительное перекрестие оптическим проекционным
96800 .i
устройством 24. Зеркала 19 и 20 раэмещены в одной плоскости с оптическими элементами 16, 17, 8, 21 и 9, установленными на карбтке .вертикального перемещения.
Устройство работает следующим образом.
Луч света от лазерного осветителя (фиг,2) проходит через систе0 му 14 коллимирования и фильтрации света, расщиряется до необходимого для подсветки измерительной зоны голограммы значения и через систему 15 зеркал освещает измерительную
15 зону голограммы, расположенной в кадровом окне 3. Восстановленное с голограммы действительное изображение, которое пропускает зеркало 16 с эллипсным отверстием, передается
20 в увеличенном масштабе объективом 17 на видеокамеру 8, Мнимое изображение отражается зеркалом 16 и через систему зеркал 18-20, 25 и 26, обеспечивающих синхронное перемещение
25 среза мнимого объема по отнощению к перемещению среза действительного объема, объективом 21 передается в уменьшенном масштабе на видеокамеру 9,
30
Разделение действительного и мнимого изображений на зеркале 16 происходит за счет отверстия, выполненного с таким расчетом, чтобы пропускать сферическую волну, которая распространяется в апертурном угле дифракции на микрообъекте, согласно теории дифракционного образования изображений. Апертурный угол определяется из соотношения
- 2Р -1 sinU
где р - радиус микрообъекта; Л - длина волны;
и - апертурный угол в пространстве изображений.
По известным размерам микрообъектов и оптическим параметрам оптики определяется размер и форма отверстия в зеркале.
Сферическая волна от мнимого изображения распространяется в таком же апертурном угле, что и от действительного изображения. Поскольку расстояние от мнимого источника сферической волны до зеркала с эллипсным отверстием значительно больше, чем расстояние от
сопряженного действительного источника сферической волны, то площадь пересечения световой волны от мнимого источника с зеркалом 16 значительно, больше площади отверстия и сферическая волна от мнимого источника отразится зеркалом 16 на зеркало 18,
Зеркало 18 направляет луч параллельно направлению перемещения каретки 6 вертикальной координаты на зеркала 19 и 20, которые установлены взаимно перпендикулярно на каретке 5 поперечногр перемещения и неподвижны по вертикальной координате. Зеркало 20 разворачивает луч параллельно направлению пере-, мещения каретки вертикальной координаты 6 и направляет его через зеркала 25 и 26 в объектив 21, который установлен на подвижной платформе каретки 6 вертикальной координаты вместе с видеокамерой .9. При перемещении каретки 6 вертикаль ной координаты зеркало 16 с эллипсным отверстием, зеркало 18, объектив 21 и видеокамера 9 перемещаются относительно двух неподвижных по вертикальной координате зеркал 19 и 20, при этом, за счет изменения длины оптического пути от объектива 21 до голограммы, установленной в кадровом окне 3, происходит непрерывная синхронная фокусировка на сопряженные с действительным изображением срезы мнимого изображения.
Процесс измерения положения, микрообъекта в пространстве сводится к совмещению плоскости наводки, которая соответствует наиболее резкому изображению предмета на экране телемонитора 22 и к одновременному совмещению центра микрообъекта с изображением измерительного перекрестия. Этот процесс осуществляется линейным перемещением кареток 2 продольного перемещения, 5 поперечного перемеще;ния и 6 вертикального перемещения от электропроводов 11, а отсчеты координат производятся датчиками 12 линейного перемещения.
Устройство работает в полуавтоматическом режиме с участием оператора. Оператор наблюдает на одном из телемониторов уменьшенный срез мнимого изображения объема,
1968004
восстановленного с голограммы i.большим линейным полем, а на втором телемониторе наблюдают фрагмент этого же среза с увеличением, на
5 котором также изображено неподвижное измерительное перекрестие. Совмещение изображений перекрестия и точки трека на экране телемонитора 22 и наводка на наилучшую резfO кость осуществляются оператором при помощи щаров управления. При этом программа мини-ЭВМ воспринимает импульсные последовательности, поступающие с трех преобразовате15 угол-импульс. Процедура совмещения изображений перекрестия и точек трека заканчивается нажатием определенной клавиши на клавиатуре дисплея, означающем команду снятия
20 отсчетов с датчиков 12 линейного перемещения и записи координат в памяти мини-ЭВМ,
. После этого программа управления вычисляет по ранее измеренным
25 координатам точек примерные координаты следующей точки, подлежащей измерению, и осуществляется автоматический вывод измерительных кареток в зону этой точки с последующим точным центрированием операто30ром. Работа производится с положительными значениями координат, поэтому перед началом измерения вы полняется операция автоматического обнуления отсчетной системы устройства. Перемотка носителя фильмовой информации ле нтопротяжным механизмом (ЛПМ) производится как автоматически, на предварительно известный кадр, так и оператором с
40 использованием шара управления, выступающего- в качестве органа управления ЛПМ, Переход с ручного управления ЛПМ -на автоматическое ПРОИЗВОДИТСЯ оператором через кла45виатуру дисплея с использованием ЭВМ.
Таким образом, предложенное устройство позволяет получать разномасштабные телеизображения без повьшзения мощности лазера с одновременным разделением действительного и мнимого изображений, повысить качество телеизображений за
счет исключения взаимовлияния
действительного и мнимого изображений друг на друга, а также повысить по отношению к известному
устройству в 2 раза производительность измерений за счет введения обзорного канала, облегчающего оператору поиск вершин актов рождения и распада частиц с новым квантовым числомочарования.
Изобретение может быть использовано для массовых измерений координат любых объемных изображений микрообъектов с размерами от долей микрон до десятков микрон, зафиксированных на голограммах, с разномасштабным отображением их на телеэкранах в различных областях физики, биологии, медицины и в системах неразрушающего контроля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения трехмерных микрообъектов и изображений | 1983 |
|
SU1116865A1 |
| СПОСОБ ГОЛОГРАФИЧЕСКОГО АНАЛИЗА ВЗВЕШЕННЫХ ЧАСТИЦ | 2014 |
|
RU2558279C1 |
| Устройство для регистрации и восстановления интерферограмм фазовых объектов | 1983 |
|
SU1140533A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЙ ДЕФЕКТОВ НА АСФЕРИЧЕСКОЙ ПОВЕРХНОСТИ ОПТИЧЕСКОЙ ДЕТАЛИ (ВАРИАНТЫ) | 2015 |
|
RU2612918C9 |
| УСТРОЙСТВО РЕГИСТРАЦИИ ЦИФРОВЫХ ГОЛОГРАФИЧЕСКИХ И СПЕКТРАЛЬНЫХ ИЗОБРАЖЕНИЙ МИКРООБЪЕКТОВ | 2019 |
|
RU2703495C1 |
| Устройство для измерения голографических характеристик фоторегистрирующих сред | 1984 |
|
SU1254428A1 |
| Контрольно-юстировочное устройство | 1978 |
|
SU742858A1 |
| Устройство для регистрации деятельности и состояния человека-оператора | 1980 |
|
SU967468A1 |
| ГОЛОГРАФИЧЕСКИЙ ПРИЦЕЛ И УСТРОЙСТВО ЗАПИСИ ГОЛОГРАММЫ ПРИЦЕЛЬНОГО ЗНАКА | 2007 |
|
RU2352890C1 |
| СПОСОБ ЗАПИСИ И ВОССТАНОВЛЕНИЯ ГОЛОГРАММЫ ДВУХМЕРНОГО ИЛИ ТРЕХМЕРНОГО ОБЪЕКТА | 2006 |
|
RU2306589C1 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ИЗОБРАЖЕНИЙ МИКРООБЪЕКТОВ, ВОССТАНОВЛЕННЫХ С ПЛОСКИХ ГОЛОГРАММ, содержащее последовательно расположенные лазерный осветитель с системой коллимирования света, размещенные в станцне, на которой смонтированы каретка продольного перемещения с установленным на ней кадровым ркном и лентопротяжным механизмом, каретка поперечного перемещения, на которой размещена каретка вертикальной координаты, на которой установлены измерительный объектив и видеокамера, а также I оптический канал проецирования измерительного перекрестия на видеокамеру, отличающееся тем, что, с целью повышения производительности измерений., в него дополнительно введены отклоняющее зеркало с центральным эллипсны отверстием, три непрозрачных зеркала, длиннофокусный объектив, вторая видеокамера и телемонитор, причем зеркало с центральньм отверстием установлено перед измерительным объективом под углом к оптической оси и жестко связано с ним, непрозрачные зеркала оптически связывают о S9 зеркало с центральным отверстием (Л и длиннофокусный объектив, за которым установлена вторая видеокамера, при .этом первое зеркало, длиннофокусный объектив и вторая видеокамера установлены над кадровым окном на каретке вертикального перемещения и жестко связаны с ней, второе и третье зеркала установлены на каретке поперечного перемещения О5 и жестко связаны с ней. 00
W
5
| Drevermann Н., Ceissler К | |||
| The Holraer project, CERN , 22, March 1982 | |||
| Устройство для измерения трехмерных микрообъектов и изображений | 1983 |
|
SU1116865A1 |
| кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
